Anda mungkin juga menyukai
- Bermad: Solenoid Controlled ValveDokumen2 halamanBermad: Solenoid Controlled ValveBruno AlbuquerqueBelum ada peringkat
- H Service Data SheetDokumen8 halamanH Service Data SheetBoštjan ŠumenjakBelum ada peringkat
- Distribution Connectors: Section DG Distribution Tools Series GP Fargo Connector WrenchesDokumen28 halamanDistribution Connectors: Section DG Distribution Tools Series GP Fargo Connector WrenchesBenjamin HidalgoBelum ada peringkat
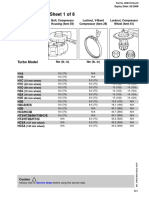
- H Service Data Sheet 1 of 7: Turbo ModelDokumen7 halamanH Service Data Sheet 1 of 7: Turbo ModelNaveedBelum ada peringkat
- Holset Hoja de ServicioDokumen8 halamanHolset Hoja de ServicioJuan Carlos Constanzo PincheiraBelum ada peringkat
- H Service Data SheetDokumen8 halamanH Service Data SheetSamuel Sneddon-NelmesBelum ada peringkat
- Parts List 2Dokumen2 halamanParts List 2Anais HerreraBelum ada peringkat
- SECTION 307-01A: Automatic Transaxle/Transmission - CVT 2005 Freestyle/Five Hundred/Montego Workshop Manual SpecificationsDokumen5 halamanSECTION 307-01A: Automatic Transaxle/Transmission - CVT 2005 Freestyle/Five Hundred/Montego Workshop Manual Specificationskamaleon doradoBelum ada peringkat
- LG-6001 Lead Gage: Operation ManualDokumen24 halamanLG-6001 Lead Gage: Operation ManualSukumarBelum ada peringkat
- Ginetta G50 Build ManualDokumen91 halamanGinetta G50 Build ManualDVM97Belum ada peringkat
- Specifications For Crankshafts in C7, C9, C-9, C10, C11, C12, C-12, C13, C-13, C15, C-15, C16, C-16, C18, C-18, C27, C30, and C32 Engines (1202)Dokumen18 halamanSpecifications For Crankshafts in C7, C9, C-9, C10, C11, C12, C-12, C13, C-13, C15, C-15, C16, C-16, C18, C-18, C27, C30, and C32 Engines (1202)Eduar VasqBelum ada peringkat
- Echnical Information: Oncept and Main ApplicationsDokumen15 halamanEchnical Information: Oncept and Main ApplicationsJózek JózekBelum ada peringkat
- BL Operation Manual PDFDokumen12 halamanBL Operation Manual PDFyounesBelum ada peringkat
- Wiring Diagram Drive Control (FR)Dokumen7 halamanWiring Diagram Drive Control (FR)Heru PurwantoBelum ada peringkat
- Product Overview: Series 85P5-1Dokumen3 halamanProduct Overview: Series 85P5-1Be HappyBelum ada peringkat
- Specifications For Crankshafts in Caterpillar Engines (1202) : Cerrar SISDokumen82 halamanSpecifications For Crankshafts in Caterpillar Engines (1202) : Cerrar SISLuis TepezanoBelum ada peringkat
- Manual - Pro-series-fish-manual-G3 - B10414 Iss1Dokumen72 halamanManual - Pro-series-fish-manual-G3 - B10414 Iss1gregorioBelum ada peringkat
- H Service Data Sheet PDFDokumen8 halamanH Service Data Sheet PDFAbhijit MannaBelum ada peringkat
- Pressure Washers C 100.7: The Light Entry-Level, High-Pressure Washer That Will Power Up Your Basic Outdoor CleaningDokumen5 halamanPressure Washers C 100.7: The Light Entry-Level, High-Pressure Washer That Will Power Up Your Basic Outdoor CleaningyunanBelum ada peringkat
- Sakura Filter WeichaiDokumen6 halamanSakura Filter WeichaiIndra AhmBelum ada peringkat
- HR2450FT, HR2450TDokumen24 halamanHR2450FT, HR2450TangelescuoBelum ada peringkat
- Service SpecificationsDokumen24 halamanService SpecificationsBob DesmetBelum ada peringkat
- 5-0001 Wire Line Guide BJDokumen1 halaman5-0001 Wire Line Guide BJJacekBelum ada peringkat
- Model Code. Series 02. Medium Pressure. Valid From January 1, 2014Dokumen16 halamanModel Code. Series 02. Medium Pressure. Valid From January 1, 2014AliBelum ada peringkat
- Robotshop Multi Purpose Robotic Arm GuideDokumen20 halamanRobotshop Multi Purpose Robotic Arm GuidehutiogBelum ada peringkat
- Automatic and Manual Turrets PDFDokumen28 halamanAutomatic and Manual Turrets PDFPhineas MagellanBelum ada peringkat
- REHS9597-19 Repair of Large Wheel Loader Lift Arms and LeversDokumen26 halamanREHS9597-19 Repair of Large Wheel Loader Lift Arms and LeversCarlosBelum ada peringkat
- Wide-Glide U-Nuts: Minimize Side Break-Out in Thin Sheet MaterialsDokumen2 halamanWide-Glide U-Nuts: Minimize Side Break-Out in Thin Sheet MaterialsG.L. HuyettBelum ada peringkat
- Wide-Glide U-Nuts: Minimize Side Break-Out in Thin Sheet MaterialsDokumen2 halamanWide-Glide U-Nuts: Minimize Side Break-Out in Thin Sheet MaterialsG.L. HuyettBelum ada peringkat
- European MarketDokumen32 halamanEuropean MarketDejan Simonovic PrivatnoBelum ada peringkat
- Master Cylinder 77 SeriesDokumen1 halamanMaster Cylinder 77 SeriesAdrian David Castillo SabinoBelum ada peringkat
- Product Information Sheet: Pivot PegzDokumen2 halamanProduct Information Sheet: Pivot PegzphopBelum ada peringkat
- A. MAN. F-013A Rev 0.0 Program Pemeriksaan Undercarriage - D155 OKDokumen6 halamanA. MAN. F-013A Rev 0.0 Program Pemeriksaan Undercarriage - D155 OKMiswanto LantaBelum ada peringkat
- Quotation Scheme Jstomi: Equiptech (PVT.) LTDDokumen4 halamanQuotation Scheme Jstomi: Equiptech (PVT.) LTDvasiliy vasilievichBelum ada peringkat
- 2005 FZ6-S Service ManualDokumen20 halaman2005 FZ6-S Service ManualBratkó BenceBelum ada peringkat
- 57BYG Hybrid Stepping Motor SpecsDokumen2 halaman57BYG Hybrid Stepping Motor SpecsVlad RozmarinBelum ada peringkat
- Clutch Cable PDFDokumen4 halamanClutch Cable PDFVEERAMANIBelum ada peringkat
- ESFLE 208 2248883.htmlDokumen2 halamanESFLE 208 2248883.htmlAndrei DumitruBelum ada peringkat
- Nenutec Product Catalogue'23 NABM 05NmDokumen4 halamanNenutec Product Catalogue'23 NABM 05Nmphuoc le van100% (1)
- YZF R3 GYTR WSSP 300 Kit Manual 2019Dokumen9 halamanYZF R3 GYTR WSSP 300 Kit Manual 2019Bharathi RajBelum ada peringkat
- Mailhot - User Guide G2-235-8.7-5A REV 1 (Mack)Dokumen15 halamanMailhot - User Guide G2-235-8.7-5A REV 1 (Mack)Ignacio Rifo NochezBelum ada peringkat
- ULTEGRA Caliper BrakeDokumen1 halamanULTEGRA Caliper BrakeBrandon GomezBelum ada peringkat
- BMW M50 Bosch DME 3.3.1 (93-96) ECU Pinout GuideDokumen3 halamanBMW M50 Bosch DME 3.3.1 (93-96) ECU Pinout GuideAndrey buzyaBelum ada peringkat
- Swivel (水龙头)Dokumen16 halamanSwivel (水龙头)Omar Fathy100% (1)
- Torque specs for D12D cylinder headDokumen2 halamanTorque specs for D12D cylinder headAparecidaMarques0% (1)
- Gagemaker ET 7000 External Taper Operation ManualDokumen16 halamanGagemaker ET 7000 External Taper Operation ManualluBelum ada peringkat
- ET-7000 Series Operation Manual: External Thread Taper GageDokumen16 halamanET-7000 Series Operation Manual: External Thread Taper GageYury GonzalesBelum ada peringkat
- Polymer80 RJ556U Build InstructionsDokumen14 halamanPolymer80 RJ556U Build InstructionsAW GehrsBelum ada peringkat
- Exporting Window-RUSSTIGER Enterprise Co., LtdDokumen37 halamanExporting Window-RUSSTIGER Enterprise Co., LtdjamilBelum ada peringkat
- Hytorc-Hy115 Hy230 Hy400 Pumps-Cut SheetDokumen2 halamanHytorc-Hy115 Hy230 Hy400 Pumps-Cut SheetCristian M.Belum ada peringkat
- 490 Series pneumatic actuatorsDokumen17 halaman490 Series pneumatic actuatorsJesus BolivarBelum ada peringkat
- 6-Pole-LES-50Hz.pdfDokumen35 halaman6-Pole-LES-50Hz.pdfhrga.branzbsd55Belum ada peringkat
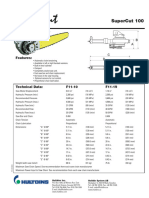
- SC100Dokumen1 halamanSC100Gabriella VieiraBelum ada peringkat
- DatasheetDokumen6 halamanDatasheetLuis Gustavo ReisBelum ada peringkat
- Nightshifter 6000 Hydraulic Series Spare Parts Manual Rev04Dokumen40 halamanNightshifter 6000 Hydraulic Series Spare Parts Manual Rev04Robert Kirk0% (1)
- Atlas Copco COP 54 GoldDokumen1 halamanAtlas Copco COP 54 GoldAlparslanBelum ada peringkat
- Service Data: Trimmer/BrushcutterDokumen7 halamanService Data: Trimmer/BrushcutterrexBelum ada peringkat
- HX & HY Service Data SheetDokumen16 halamanHX & HY Service Data Sheetmauricio olayaBelum ada peringkat
- Slip Type ElevatorDokumen15 halamanSlip Type ElevatorJohn Jairo SimancaBelum ada peringkat
- Eries Ules: Avalanche PressDokumen20 halamanEries Ules: Avalanche PressThomas HerrlichBelum ada peringkat
- Game Specific Rules: 2nd EditionDokumen28 halamanGame Specific Rules: 2nd EditionThomas HerrlichBelum ada peringkat
- Pby - 5A Catalina: Building InstructionsDokumen68 halamanPby - 5A Catalina: Building InstructionsThomas Herrlich100% (3)
- Transit Nomogram 03 BDokumen1 halamanTransit Nomogram 03 BThomas HerrlichBelum ada peringkat
- Lacquered CoffinsDokumen42 halamanLacquered CoffinsThomas Herrlich100% (2)
- Phase Change Materials Store Large Amounts of Thermal EnergyDokumen34 halamanPhase Change Materials Store Large Amounts of Thermal EnergyMohammed FarisBelum ada peringkat
- The Russian Federation Navy - An Assessment of Its Startegic Setting, Doctrine and ProspectsDokumen41 halamanThe Russian Federation Navy - An Assessment of Its Startegic Setting, Doctrine and ProspectsHarold_Godwinson100% (1)
- Unclassified: Approved For Public Release, Distribution UnlimitedDokumen53 halamanUnclassified: Approved For Public Release, Distribution UnlimitedThomas HerrlichBelum ada peringkat
- Control LED Integrated Light Source with 40 CharactersDokumen5 halamanControl LED Integrated Light Source with 40 CharactersMathavanSekarBelum ada peringkat
- FarmingDokumen13 halamanFarmingChris ShanahanBelum ada peringkat
- fm7-100-4 Opposing Force Organization Guidefm7-100-4Dokumen224 halamanfm7-100-4 Opposing Force Organization Guidefm7-100-4Joseph DejesusBelum ada peringkat
- SoleilRoyal Pack 01 PDFDokumen11 halamanSoleilRoyal Pack 01 PDFThomas HerrlichBelum ada peringkat
- Artillery DuelDokumen1 halamanArtillery DuelThomas HerrlichBelum ada peringkat
- Warsaw Pact Order of Battle - June 1989Dokumen72 halamanWarsaw Pact Order of Battle - June 1989jb2ookworm100% (17)
- Warsaw Pact Forces Opposite NATODokumen97 halamanWarsaw Pact Forces Opposite NATOLilac44100% (4)
- Oseberg NarrowDokumen4 halamanOseberg NarrowThomas HerrlichBelum ada peringkat
- Vasa Pack 11Dokumen119 halamanVasa Pack 11Thomas HerrlichBelum ada peringkat
- Porsche911 Pack 9Dokumen37 halamanPorsche911 Pack 9Thomas HerrlichBelum ada peringkat
- Akagi Product OverviewDokumen4 halamanAkagi Product OverviewThomas Herrlich100% (3)
- Prayer to the Machine GodDokumen2 halamanPrayer to the Machine GodThomas HerrlichBelum ada peringkat
- BYOXW 01 Digital SmallDokumen16 halamanBYOXW 01 Digital SmallThomas HerrlichBelum ada peringkat
- Easy Rider Pack 5Dokumen14 halamanEasy Rider Pack 5Thomas HerrlichBelum ada peringkat
- CMBN Game ManualDokumen200 halamanCMBN Game Manualmarkojovanovic91Belum ada peringkat
- CM Engine Manual v4.00Dokumen126 halamanCM Engine Manual v4.00ititodebilBelum ada peringkat
- CMBN ReadMe v101Dokumen3 halamanCMBN ReadMe v101Thomas HerrlichBelum ada peringkat
- Raise The Limits: Eppendorf Research PlusDokumen12 halamanRaise The Limits: Eppendorf Research PlusZahia Slama Ep AchourBelum ada peringkat
- Is This Normal or ADHDDokumen52 halamanIs This Normal or ADHDDianaBelum ada peringkat
- CBSE Class 11 English Sample Paper Set 5Dokumen8 halamanCBSE Class 11 English Sample Paper Set 5Shantam BasuBelum ada peringkat
- Soal Big A Tukpd 2011-2012 RevisiDokumen5 halamanSoal Big A Tukpd 2011-2012 RevisiTriana WatiBelum ada peringkat
- JAN LOHFELDT vs. NEDBANK LTD - Cape Town High Court Judge Goliath (24.02.2014) & Judge Zondi (25.02.2014)Dokumen24 halamanJAN LOHFELDT vs. NEDBANK LTD - Cape Town High Court Judge Goliath (24.02.2014) & Judge Zondi (25.02.2014)willBelum ada peringkat
- EM 385-1-1 Chapters 20-26Dokumen179 halamanEM 385-1-1 Chapters 20-26MusabBelum ada peringkat
- English Terms 1 Major Assessment Worksheet Answer KeyDokumen29 halamanEnglish Terms 1 Major Assessment Worksheet Answer KeySamiBelum ada peringkat
- 1625-De Dwks Parts ListDokumen69 halaman1625-De Dwks Parts ListSasan AbbasiBelum ada peringkat
- GMSARN Conf: Design Criteria on Substation ProtectionDokumen6 halamanGMSARN Conf: Design Criteria on Substation Protectionbdaminda6701Belum ada peringkat
- Aspirasi MekoniumDokumen17 halamanAspirasi MekoniumimanBelum ada peringkat
- CPE PRACTICE TEST 2 READINGDokumen4 halamanCPE PRACTICE TEST 2 READINGHong Anh0% (1)
- Final 401Dokumen8 halamanFinal 401Hong Chul NamBelum ada peringkat
- Hoa ReviewerDokumen3 halamanHoa ReviewerRachel Mae BahoyBelum ada peringkat
- Network FYPDokumen3 halamanNetwork FYPla tahzanBelum ada peringkat
- Mahamrityunjaya MantraDokumen8 halamanMahamrityunjaya MantraBalakrishnan KannanBelum ada peringkat
- W2AEW Videos (Apr 29, 2017) Topics Listed NumericallyDokumen12 halamanW2AEW Videos (Apr 29, 2017) Topics Listed Numericallyamol1agarwalBelum ada peringkat
- Sap MRP ConfigDokumen23 halamanSap MRP Configsharadapurv100% (1)
- Max 223C Pipeline Welding InverterDokumen2 halamanMax 223C Pipeline Welding InvertermtonellyBelum ada peringkat
- 066 LW Tensile Tester v2.0 PDFDokumen4 halaman066 LW Tensile Tester v2.0 PDFMarkusBelum ada peringkat
- Ajhgaa English O6Dokumen28 halamanAjhgaa English O6dhirumeshkumarBelum ada peringkat
- Enzymatic Browning and Its Prevention-American Chemical Society (1995)Dokumen340 halamanEnzymatic Browning and Its Prevention-American Chemical Society (1995)danielguerinBelum ada peringkat
- Auto IntroductionDokumen90 halamanAuto IntroductionShivanand ArwatBelum ada peringkat
- STC PDFDokumen34 halamanSTC PDFМиша ШаулаBelum ada peringkat
- MSE Admission and Degree RequirementsDokumen6 halamanMSE Admission and Degree Requirementsdeathbuddy_87Belum ada peringkat
- #4 Types of Food, Ingredients and Procedures.Dokumen7 halaman#4 Types of Food, Ingredients and Procedures.Peter GonzálezBelum ada peringkat
- Design and Analysis of Interleaved Boost Converter for Increased Renewable Energy OutputDokumen18 halamanDesign and Analysis of Interleaved Boost Converter for Increased Renewable Energy OutputHarshitBelum ada peringkat
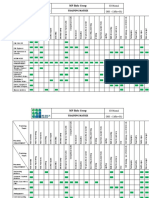
- MP Birla Group: Training MatrixDokumen3 halamanMP Birla Group: Training MatrixAprilia kusumaBelum ada peringkat
- Water Demand Fire Flow Calculation Hydraulic ModelingDokumen110 halamanWater Demand Fire Flow Calculation Hydraulic ModelingArthur DeiparineBelum ada peringkat
- Ruby and Pink Sapphire - IntroDokumen3 halamanRuby and Pink Sapphire - Introrazanym100% (1)
- Kerr Injection WaxesDokumen1 halamanKerr Injection WaxesmarosnaxBelum ada peringkat