Anda mungkin juga menyukai
- Movement Biomechanics Goes Upwards-From The Leg To The ArmDokumen10 halamanMovement Biomechanics Goes Upwards-From The Leg To The ArmMuhammad FahmyBelum ada peringkat
- Upper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceDokumen4 halamanUpper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceLaura CursaruBelum ada peringkat
- Biomechanics of Overground vs. Treadmill Walking in Healthy IndividualsDokumen9 halamanBiomechanics of Overground vs. Treadmill Walking in Healthy IndividualsAlvaroBelum ada peringkat
- Robot-Assisted Gait Training (Lokomat) Improves Walking Function and Activity in People With Spinal Cord Injury: A Systematic ReviewDokumen13 halamanRobot-Assisted Gait Training (Lokomat) Improves Walking Function and Activity in People With Spinal Cord Injury: A Systematic ReviewSAMUEL ENRIQUE ASTUDILLO VARGASBelum ada peringkat
- Koop Man 2014Dokumen12 halamanKoop Man 2014Elizabeth CominaBelum ada peringkat
- Human Sit-to-Stand Transfer Modeling For Optimal Control of Assistive RobotsDokumen7 halamanHuman Sit-to-Stand Transfer Modeling For Optimal Control of Assistive Robotsnadia.imranBelum ada peringkat
- A Pervasive Sensing Approach To Automatic Assessment of Trunk Coordination Using Mobile DevicesDokumen18 halamanA Pervasive Sensing Approach To Automatic Assessment of Trunk Coordination Using Mobile DevicesZilu LiangBelum ada peringkat
- System of Reporting and Comparing Effects of Assistive Devices on GaitDokumen8 halamanSystem of Reporting and Comparing Effects of Assistive Devices on GaitFernando Ortiz CorredorBelum ada peringkat
- Gaitan 1 PDFDokumen12 halamanGaitan 1 PDFDeborah SalinasBelum ada peringkat
- Kinematics and Kinetics of Gait: From Lab To Clinic: Clinics in Sports Medicine July 2010Dokumen20 halamanKinematics and Kinetics of Gait: From Lab To Clinic: Clinics in Sports Medicine July 2010Sanhita SenguptaBelum ada peringkat
- Optimizing The Distribution of Leg Muscles For Vertical JumpingDokumen15 halamanOptimizing The Distribution of Leg Muscles For Vertical JumpingWarren EnglishBelum ada peringkat
- Quantifying Dynamic Stability and Maneuverability in Legged LocomotionDokumen9 halamanQuantifying Dynamic Stability and Maneuverability in Legged Locomotionisbro1788Belum ada peringkat
- 64 Dynam Stab PDFDokumen9 halaman64 Dynam Stab PDFisbro1788Belum ada peringkat
- Chakraborty 2020Dokumen13 halamanChakraborty 2020Lilian ChenBelum ada peringkat
- Motion Analysis and Postural Stability of Transtibial Prosthesis UsersDokumen6 halamanMotion Analysis and Postural Stability of Transtibial Prosthesis UsersMady BuzeaBelum ada peringkat
- Bertram Et Al. 2013Dokumen6 halamanBertram Et Al. 2013Bruno Junior dos SantosBelum ada peringkat
- Yusof Baharuddin 2015Dokumen5 halamanYusof Baharuddin 2015kan6de6jayBelum ada peringkat
- Initial Biomechanical Analysis and Modeling of Transfemoral Amputee GaitDokumen7 halamanInitial Biomechanical Analysis and Modeling of Transfemoral Amputee GaitAshwini Kumar BaluguriBelum ada peringkat
- Neuromechanical Model-Based Control of Bi-Lateral Ankle Exoskeletons: Biological Joint Torque and Electromyogram Reduction Across Walking ConditionsDokumen14 halamanNeuromechanical Model-Based Control of Bi-Lateral Ankle Exoskeletons: Biological Joint Torque and Electromyogram Reduction Across Walking ConditionsAdrian CarhuazBelum ada peringkat
- Biomechanics and Muscular-Activity During Sit-to-Stand TransferDokumen11 halamanBiomechanics and Muscular-Activity During Sit-to-Stand TransferAh ZhangBelum ada peringkat
- Proyecto 2019 2ADokumen10 halamanProyecto 2019 2AdanielBelum ada peringkat
- Par Des 2016Dokumen6 halamanPar Des 2016seyedmohamadBelum ada peringkat
- IMU-Based Gait Normalcy Index Calculation For Clinical Evaluation of Impaired GaitDokumen10 halamanIMU-Based Gait Normalcy Index Calculation For Clinical Evaluation of Impaired GaitsanahujalidiaBelum ada peringkat
- Novacheck 1998 - Biomechanics of Running - Classic PaperDokumen19 halamanNovacheck 1998 - Biomechanics of Running - Classic PaperFábio LanferdiniBelum ada peringkat
- Errorstate KalmanfilterDokumen32 halamanErrorstate KalmanfilterXiaohan TangBelum ada peringkat
- Effects of Locomotion Mode Recognition Errors On Volitional Control of Powered Above-Knee ProsthesesDokumen9 halamanEffects of Locomotion Mode Recognition Errors On Volitional Control of Powered Above-Knee ProsthesesjuanBelum ada peringkat
- J Neurophysiol 2014 Rankin 374 83Dokumen10 halamanJ Neurophysiol 2014 Rankin 374 83barros6Belum ada peringkat
- Current Trends in The Biokinetic Analysis of The Foot and AnkleDokumen6 halamanCurrent Trends in The Biokinetic Analysis of The Foot and AnkleCarlos gutierrezBelum ada peringkat
- Gait & Posture: SciencedirectDokumen11 halamanGait & Posture: SciencedirectJorge MenesesBelum ada peringkat
- Effectiveness of Robotic Exoskeletons For Improving Gait in Children With Cerebral Palsy - A Systematic ReviewDokumen12 halamanEffectiveness of Robotic Exoskeletons For Improving Gait in Children With Cerebral Palsy - A Systematic ReviewAkim KbBelum ada peringkat
- BiomekanikDokumen2 halamanBiomekanikBrinna Anindita SatriaBelum ada peringkat
- 1 s20 S0161475420300373 Main - 230309 - 112711Dokumen13 halaman1 s20 S0161475420300373 Main - 230309 - 112711Andrey AlvesBelum ada peringkat
- Flex A o SimplesDokumen15 halamanFlex A o SimplesPatrick SilvaBelum ada peringkat
- Does The Amount of Lower Extremity Movement Variability Differ Between Injured and Uninjured Populations? A Systematic ReviewDokumen46 halamanDoes The Amount of Lower Extremity Movement Variability Differ Between Injured and Uninjured Populations? A Systematic ReviewJoeBelum ada peringkat
- A Model of The Neuro-Musculo-Skeletal System For Anticipatory Adjustment of Human Locomotion During Obstacle AvoidanceDokumen9 halamanA Model of The Neuro-Musculo-Skeletal System For Anticipatory Adjustment of Human Locomotion During Obstacle Avoidancethanhr2411Belum ada peringkat
- Modeling The Neuro-Mechanics of Human Balance WhenDokumen25 halamanModeling The Neuro-Mechanics of Human Balance Whennadia.imranBelum ada peringkat
- Current Concepts: Biomechanics of Knee LigamentsDokumen11 halamanCurrent Concepts: Biomechanics of Knee LigamentsBarbaraAndradeQuirozBelum ada peringkat
- Comparative Analysis of Dynamic External Factors On The Body BehaviorDokumen4 halamanComparative Analysis of Dynamic External Factors On The Body BehaviorAd FelixBelum ada peringkat
- The Musculoskeletal System of Humans Is Not Tuned To Maximize The Economy of LocomotionDokumen6 halamanThe Musculoskeletal System of Humans Is Not Tuned To Maximize The Economy of LocomotionRhirin JiehhBelum ada peringkat
- Ecea-1 2646 ManuscriptDokumen20 halamanEcea-1 2646 ManuscriptMarceloPadilhaBelum ada peringkat
- ETJ - Volume 37 - Issue 7A - Pages 282-289Dokumen8 halamanETJ - Volume 37 - Issue 7A - Pages 282-289yu prdnyaBelum ada peringkat
- Torricelli 2016 Bioinspir. Biomim. 11 051002Dokumen21 halamanTorricelli 2016 Bioinspir. Biomim. 11 051002Tình Nguyễn VănBelum ada peringkat
- Wearable Movement Sensors For RehabilitationDokumen6 halamanWearable Movement Sensors For RehabilitationTom DisveldBelum ada peringkat
- Reduced Plantar Sensation Causes A Cautious Walking Pattern: Cite This PaperDokumen9 halamanReduced Plantar Sensation Causes A Cautious Walking Pattern: Cite This PaperAhmed AllamBelum ada peringkat
- A Global Human Walking Model With Real-Time Kinematic PersonificationDokumen21 halamanA Global Human Walking Model With Real-Time Kinematic PersonificationYoke AdlanBelum ada peringkat
- 4 PDFDokumen8 halaman4 PDFRiska Dwi AmeliaBelum ada peringkat
- The Biomechanics of RunningDokumen24 halamanThe Biomechanics of RunningThiago TinocoBelum ada peringkat
- Movement Variability in LocomotionDokumen20 halamanMovement Variability in LocomotionLaboratory in the WildBelum ada peringkat
- Mottram escápula1Dokumen6 halamanMottram escápula1Elizabeth VivancoBelum ada peringkat
- Hayashi 2012Dokumen4 halamanHayashi 2012ehabjawherBelum ada peringkat
- Paràmetres A Medir en La Marxa HumanaDokumen28 halamanParàmetres A Medir en La Marxa HumanaMaria Antonia Mateu PonsBelum ada peringkat
- Sudan University of Science & Technology College of Engineering MSC Biomedical EngineeringDokumen15 halamanSudan University of Science & Technology College of Engineering MSC Biomedical Engineeringمحمد أحمد عبدالوهاب محمدBelum ada peringkat
- Towards Realising Wearable Exoskeletons For Elderly PeopleDokumen6 halamanTowards Realising Wearable Exoskeletons For Elderly PeopleRatna SambhavBelum ada peringkat
- 【Paper - 6】3057270-Liu Xin-Applied Bionics and BiomechanicsDokumen10 halaman【Paper - 6】3057270-Liu Xin-Applied Bionics and Biomechanics2430478126Belum ada peringkat
- Recovering Planned Trajectories in Robotic Rehabilitation Therapies Under The Effects of DisturbancesDokumen16 halamanRecovering Planned Trajectories in Robotic Rehabilitation Therapies Under The Effects of DisturbancesJose Luis SarmientoBelum ada peringkat
- Instrumented Shoes For Daily Activity MonitoringDokumen195 halamanInstrumented Shoes For Daily Activity Monitoringst_luiseBelum ada peringkat
- Biomechanics of RunningDokumen19 halamanBiomechanics of RunningJaviera Paz VegaBelum ada peringkat
- Amputee Mobility Predictor Assessment Tool For Patients Ability or Potential To Use ProsthesisDokumen2 halamanAmputee Mobility Predictor Assessment Tool For Patients Ability or Potential To Use ProsthesisMatthew PhillipsBelum ada peringkat
- Amputee Mobility Predictor Assessment Tool - Ampnopro: ST NDDokumen2 halamanAmputee Mobility Predictor Assessment Tool - Ampnopro: ST NDHari25885Belum ada peringkat
- Art de La Marcha en AmputadoDokumen6 halamanArt de La Marcha en Amputadojessica lozanoBelum ada peringkat
- Amputee Mobility Predictor-Bilateral: A Performance-Based Measure of Mobility For People With Bilateral Lower-Limb LossDokumen8 halamanAmputee Mobility Predictor-Bilateral: A Performance-Based Measure of Mobility For People With Bilateral Lower-Limb LossMatthew PhillipsBelum ada peringkat
- Carpal Tunnel SyndromeDokumen7 halamanCarpal Tunnel Syndromeclaudia100% (1)
- Fetal Neurophysiology According To Gestational Age Aida Salihagic Kadic, Maja PredojevicDokumen5 halamanFetal Neurophysiology According To Gestational Age Aida Salihagic Kadic, Maja PredojevicDaniela Isidora San Martin CanalesBelum ada peringkat
- Muscle & Nerve Volume 15 Issue 3 1992 (Doi 10 - CopiarDokumen10 halamanMuscle & Nerve Volume 15 Issue 3 1992 (Doi 10 - CopiarPile BallBelum ada peringkat
- Muscle & Nerve Volume 31 Issue 5 2005 (Doi 10 - CopiarDokumen5 halamanMuscle & Nerve Volume 31 Issue 5 2005 (Doi 10 - CopiarMatthew PhillipsBelum ada peringkat
- Biomechanical Design Considerations For Transradial Prosthetic Interface: A ReviewDokumen12 halamanBiomechanical Design Considerations For Transradial Prosthetic Interface: A ReviewMatthew PhillipsBelum ada peringkat
- A Review of Lumbar Radiculopathy, Diagnosis, and TreatmentDokumen7 halamanA Review of Lumbar Radiculopathy, Diagnosis, and TreatmentMatthew PhillipsBelum ada peringkat
- Intervención de Niños Alto RiesgoDokumen28 halamanIntervención de Niños Alto Riesgodantess7Belum ada peringkat
- Muscle & Nerve Volume 24 Issue 9 2001 (Doi 10 - CopiarDokumen8 halamanMuscle & Nerve Volume 24 Issue 9 2001 (Doi 10 - CopiarMatthew PhillipsBelum ada peringkat
- Articulo Febrero 25Dokumen13 halamanArticulo Febrero 25Matthew PhillipsBelum ada peringkat
- A Narrative Review: Current Upper Limb Prosthetic Options and DesignDokumen11 halamanA Narrative Review: Current Upper Limb Prosthetic Options and DesignMatthew PhillipsBelum ada peringkat
- Medical Engineering and Physics: Nguiadem Clautilde, Raison Maxime, Achiche SofianeDokumen10 halamanMedical Engineering and Physics: Nguiadem Clautilde, Raison Maxime, Achiche SofianeMatthew PhillipsBelum ada peringkat
- Osseointegration Amputation Prostheses On The Upper Limbs: Methods, Prosthetics and RehabilitationDokumen11 halamanOsseointegration Amputation Prostheses On The Upper Limbs: Methods, Prosthetics and RehabilitationMatthew PhillipsBelum ada peringkat
- The Comparison of Small-SizeDokumen18 halamanThe Comparison of Small-SizeMatthew PhillipsBelum ada peringkat
- Articulo 2Dokumen10 halamanArticulo 2Matthew PhillipsBelum ada peringkat
- Journal Pre-Proof: The American Journal of MedicineDokumen29 halamanJournal Pre-Proof: The American Journal of MedicineMatthew PhillipsBelum ada peringkat
- Muscle & Nerve Volume 15 Issue 3 1992 (Doi 10 - CopiarDokumen10 halamanMuscle & Nerve Volume 15 Issue 3 1992 (Doi 10 - CopiarPile BallBelum ada peringkat
- Muscle & Nerve Volume 24 Issue 9 2001 (Doi 10 - CopiarDokumen8 halamanMuscle & Nerve Volume 24 Issue 9 2001 (Doi 10 - CopiarMatthew PhillipsBelum ada peringkat
- Medical Engineering & Physics: The Patellar Tendon Bar! Is It A Necessary Feature?Dokumen6 halamanMedical Engineering & Physics: The Patellar Tendon Bar! Is It A Necessary Feature?Matthew PhillipsBelum ada peringkat
- Visual Evoked Potentials in Clinical Neurology: MethodsDokumen2 halamanVisual Evoked Potentials in Clinical Neurology: MethodsMatthew PhillipsBelum ada peringkat
- Palermo Et Al-2017-Annals of The American Thoracic SocietyDokumen8 halamanPalermo Et Al-2017-Annals of The American Thoracic SocietyMatthew PhillipsBelum ada peringkat
- Convery 1998Dokumen7 halamanConvery 1998Matthew PhillipsBelum ada peringkat
- Lower Extremity Socket Design and Suspension: Kevin Carroll, MS, CP, FAAOPDokumen18 halamanLower Extremity Socket Design and Suspension: Kevin Carroll, MS, CP, FAAOPMatthew PhillipsBelum ada peringkat
- Socket Interface Pressure and Amputee Reported Outcomes For Comfortable and Uncomfortable Conditions of Patellar Tendon Bearing Socket: A Pilot StudyDokumen9 halamanSocket Interface Pressure and Amputee Reported Outcomes For Comfortable and Uncomfortable Conditions of Patellar Tendon Bearing Socket: A Pilot StudyMatthew PhillipsBelum ada peringkat
- Identification of The Neural Sources of The Pattern-Reversal VEP PDFDokumen13 halamanIdentification of The Neural Sources of The Pattern-Reversal VEP PDFMatthew PhillipsBelum ada peringkat
- Brain Stem Auditory, Pattern-Reversal Visual, and Short-Latency PDFDokumen18 halamanBrain Stem Auditory, Pattern-Reversal Visual, and Short-Latency PDFMatthew PhillipsBelum ada peringkat
- Developmental and Aging Changes in Somatosensory, Auditory and VisualDokumen11 halamanDevelopmental and Aging Changes in Somatosensory, Auditory and VisualMatthew PhillipsBelum ada peringkat
- Linear Stationary ModelsDokumen16 halamanLinear Stationary ModelsKaled AbodeBelum ada peringkat
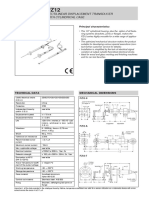
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDokumen2 halamanRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926Belum ada peringkat
- Determination of The Diffraction Intensity at Slit and Double Slit SystemsDokumen5 halamanDetermination of The Diffraction Intensity at Slit and Double Slit SystemsJose Galvan100% (1)
- Tensile Strength of Mass Concrete 913-938 PDFDokumen28 halamanTensile Strength of Mass Concrete 913-938 PDFchutton681Belum ada peringkat
- Geogrids in Walls and SlopesDokumen6 halamanGeogrids in Walls and SlopesYong Cheng Hung100% (1)
- Numericals - RajasthanUniversity - Papers End Sem ChemDokumen20 halamanNumericals - RajasthanUniversity - Papers End Sem ChemJanmendraBelum ada peringkat
- Chapter 6. ThermodynamicsDokumen7 halamanChapter 6. Thermodynamicshoney1002Belum ada peringkat
- Britishhomoeopat 00 BritialaDokumen448 halamanBritishhomoeopat 00 BritialaAlbena Trifonova0% (2)
- Quick Revision of Bio Phy Che 9 HoursDokumen489 halamanQuick Revision of Bio Phy Che 9 Hourscbsegirlsaipmt100% (2)
- Field-Weakening Control Algorithm For Interior Permanent Magnet Synchronous Motor Based On Space-Vector Modulation TechniqueDokumen9 halamanField-Weakening Control Algorithm For Interior Permanent Magnet Synchronous Motor Based On Space-Vector Modulation TechniqueArpan GayenBelum ada peringkat
- Metalic AsDokumen16 halamanMetalic AsKarencita Genesis LapibaBelum ada peringkat
- Gyro Notes For 2ND MateDokumen18 halamanGyro Notes For 2ND MateArchit Bhardwaj100% (1)
- M04 TemperatureDokumen64 halamanM04 TemperatureLê Văn TrườngBelum ada peringkat
- Radiation Heat Transfer in Combustion Systems - Viskanta and Menguc PDFDokumen64 halamanRadiation Heat Transfer in Combustion Systems - Viskanta and Menguc PDFXamir Suarez Alejandro100% (1)
- Inline Desilter ManualDokumen18 halamanInline Desilter ManualdesaviniciusBelum ada peringkat
- Levee Drain Analysis in SlideDokumen12 halamanLevee Drain Analysis in SlideAdriRGBelum ada peringkat
- 1 s2.0 0304885395011137 MainDokumen2 halaman1 s2.0 0304885395011137 MainAyush VermaBelum ada peringkat
- Beginner Ansys TutorialDokumen114 halamanBeginner Ansys TutorialNGUYEN92% (12)
- Extrusion Press PDFDokumen2 halamanExtrusion Press PDFRobert25% (4)
- Phet ReflectionDokumen3 halamanPhet Reflectionapi-260335088Belum ada peringkat
- ANSYS Model of A Cylindrical Fused Silica Fibre-01Dokumen15 halamanANSYS Model of A Cylindrical Fused Silica Fibre-01lamia97Belum ada peringkat
- Filtration of WaterDokumen32 halamanFiltration of WaterYusuf Rahmat SidikBelum ada peringkat
- ROCKYDokumen4 halamanROCKYNelson Alexander Aponte SimbronBelum ada peringkat
- Chapter 4Dokumen36 halamanChapter 4Sumedh KakdeBelum ada peringkat
- The Weighted Histogram Analysis Method (WHAM) : Michael AndrecDokumen14 halamanThe Weighted Histogram Analysis Method (WHAM) : Michael AndrecWilliam AgudeloBelum ada peringkat
- Design Procedure of Centrifugal CompressorsDokumen16 halamanDesign Procedure of Centrifugal CompressorsSrujana KandagatlaBelum ada peringkat
- A Low Order System Frequency Response ModelDokumen10 halamanA Low Order System Frequency Response ModelNadil AminBelum ada peringkat
- 4th International Conference On Thermal Equipment, Renewable Energy and Rural Development PDFDokumen500 halaman4th International Conference On Thermal Equipment, Renewable Energy and Rural Development PDFMittapalli SaikiranBelum ada peringkat
- VTU - B.E B.Tech - 2019 - 4th Semester - July - CBCS 17 Scheme - MECH - 17ME44 Fluid PDFDokumen2 halamanVTU - B.E B.Tech - 2019 - 4th Semester - July - CBCS 17 Scheme - MECH - 17ME44 Fluid PDFFakhruddin AnsariBelum ada peringkat
- Comparing Masses of Reactants and ProductsDokumen4 halamanComparing Masses of Reactants and ProductsDaniel TriumbariBelum ada peringkat