Anda mungkin juga menyukai
- Numero Reynolds, Ecuación de PousevilleDokumen7 halamanNumero Reynolds, Ecuación de PousevilleChristopher Cabrera60% (5)
- Acoples de transmisión de potencia: tipos y clasificaciónDokumen27 halamanAcoples de transmisión de potencia: tipos y clasificaciónNataliaNoriegaBelum ada peringkat
- Analisis Estructural Apuntes y ProblemasDokumen211 halamanAnalisis Estructural Apuntes y ProblemasRonald Franco100% (2)
- Catalogo Motores WEG Con DimensionesDokumen10 halamanCatalogo Motores WEG Con DimensionesCarlos Diaz100% (1)
- Actividad # 3 Interpretacion de Planos para Maquinaria IndustrialDokumen6 halamanActividad # 3 Interpretacion de Planos para Maquinaria IndustrialJeison jose Jimenez galvan71% (7)
- Semana 3 - TPMDokumen43 halamanSemana 3 - TPMeduardo quispeBelum ada peringkat
- Diseño y selección de procesos productivosDokumen23 halamanDiseño y selección de procesos productivosDaniel Vargas M100% (2)
- 3W Look Ahead IFS-0046 PDFDokumen3 halaman3W Look Ahead IFS-0046 PDFDennys Rojas ToledoBelum ada peringkat
- Sensores en El AutomovilDokumen4 halamanSensores en El AutomovilJaime RocanoBelum ada peringkat
- Primera Clase RoboticaDokumen12 halamanPrimera Clase Roboticascarlosenrique-1Belum ada peringkat
- Ejercicios Matemática DiscretaDokumen2 halamanEjercicios Matemática Discretascarlosenrique-1Belum ada peringkat
- Tarjeta AndinaDokumen1 halamanTarjeta AndinaMilton SarangoBelum ada peringkat
- Asignar RMTDokumen3 halamanAsignar RMTscarlosenrique-1Belum ada peringkat
- Carta Pardos PDFDokumen8 halamanCarta Pardos PDFscarlosenrique-1Belum ada peringkat
- Bluej - Manueal EspañolDokumen34 halamanBluej - Manueal EspañolValeria Silva TorresBelum ada peringkat
- 4.2.4.6 Lab - Viewing Wired and Wireless NIC InformationDokumen12 halaman4.2.4.6 Lab - Viewing Wired and Wireless NIC InformationJohan Sebastian Grajales BedoyaBelum ada peringkat
- Ejercicios Matemática DiscretaDokumen2 halamanEjercicios Matemática Discretascarlosenrique-1Belum ada peringkat
- Terminos y CondicionesDokumen1 halamanTerminos y Condicionesscarlosenrique-1Belum ada peringkat
- Grupos de Procesos-1Dokumen24 halamanGrupos de Procesos-1scarlosenrique-1Belum ada peringkat
- Grupos de Procesos-1Dokumen24 halamanGrupos de Procesos-1scarlosenrique-1Belum ada peringkat
- 10.1.2.4 Lab - Researching Peer-To-Peer File SharingDokumen3 halaman10.1.2.4 Lab - Researching Peer-To-Peer File SharingHaroldOchoaBelum ada peringkat
- 9 Rostro HumanoDokumen31 halaman9 Rostro Humanoscarlosenrique-1Belum ada peringkat
- Reglamento Del Estudiante 2019Dokumen8 halamanReglamento Del Estudiante 2019scarlosenrique-1Belum ada peringkat
- Des Sis Dis U5 s6 s12 InfDokumen1 halamanDes Sis Dis U5 s6 s12 Infscarlosenrique-1Belum ada peringkat
- 9 Rostro Humano PDFDokumen4 halaman9 Rostro Humano PDFscarlosenrique-1Belum ada peringkat
- Mate Discreta EjercicioDokumen1 halamanMate Discreta Ejercicioscarlosenrique-1Belum ada peringkat
- 9 Rostro Humano PDFDokumen4 halaman9 Rostro Humano PDFscarlosenrique-1Belum ada peringkat
- Resumen de Relaciones y Funciones OkDokumen4 halamanResumen de Relaciones y Funciones OkCrid XavdBelum ada peringkat
- SPA PrincipDokumen101 halamanSPA Principscarlosenrique-1Belum ada peringkat
- s29 PDFDokumen414 halamans29 PDFDavid A Nuevesiete100% (1)
- 0 IntroduccionDokumen53 halaman0 Introduccionscarlosenrique-1Belum ada peringkat
- Problemas para El Foro 1Dokumen3 halamanProblemas para El Foro 1scarlosenrique-1Belum ada peringkat
- Rodamientos, Seleccion y UsosDokumen70 halamanRodamientos, Seleccion y UsosPamela Goncalvez75% (4)
- Trasmisiones de Potencia, AcoplesDokumen6 halamanTrasmisiones de Potencia, Acoplesscarlosenrique-1Belum ada peringkat
- Correas Bandas v2 Parte1Dokumen59 halamanCorreas Bandas v2 Parte1Oswaldo Josue Tzompantzi LeonBelum ada peringkat
- Cap4 PDFDokumen15 halamanCap4 PDFscarlosenrique-1Belum ada peringkat
- E 3 Tabla 3 Trabajos Energizados y DesenergizadosDokumen1 halamanE 3 Tabla 3 Trabajos Energizados y DesenergizadosCarmen Castillo0% (1)
- 2 Requerimiento Insumos y Refacicones 2024Dokumen115 halaman2 Requerimiento Insumos y Refacicones 2024JMBelum ada peringkat
- Tarea N5 - Grupo 3Dokumen14 halamanTarea N5 - Grupo 3Yordan ChavezBelum ada peringkat
- 01 Curvado 60x40Dokumen1 halaman01 Curvado 60x40Alfonsina ReyesBelum ada peringkat
- Electróstatica Actividades ExperimentalesDokumen48 halamanElectróstatica Actividades ExperimentalescdreamilyBelum ada peringkat
- PENTA POLE PPTx-PERTIGAS BROCHUREDokumen4 halamanPENTA POLE PPTx-PERTIGAS BROCHUREAxiaBelum ada peringkat
- Diseño transportador helicoidal plomo 12ftDokumen48 halamanDiseño transportador helicoidal plomo 12ftAlvaro RamirezBelum ada peringkat
- Paloma CastilloDokumen3 halamanPaloma CastilloPaloma CastilloBelum ada peringkat
- Replanteo Aire Acondicionado - Hs-Im 03 HemoDokumen1 halamanReplanteo Aire Acondicionado - Hs-Im 03 Hemo245470Belum ada peringkat
- Informe 1 de MicrobiologiaDokumen7 halamanInforme 1 de MicrobiologiaSebastian CandoBelum ada peringkat
- Unidad Xvi Cálculo de Las Redes de DesagüeeDokumen10 halamanUnidad Xvi Cálculo de Las Redes de DesagüeeZander Meza ChoqueBelum ada peringkat
- Tema #5 Cantidad de CalorDokumen17 halamanTema #5 Cantidad de CalorRichard R. GómezBelum ada peringkat
- Configuracion Base ComunDokumen3 halamanConfiguracion Base ComunjoseBelum ada peringkat
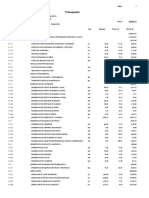
- Presupuesto Estructuras Hosp - TarapotoDokumen4 halamanPresupuesto Estructuras Hosp - TarapotoDiegoCastilloBelum ada peringkat
- Cotizador Instalacion A.A. DX - 2016 Ver. 2.0Dokumen52 halamanCotizador Instalacion A.A. DX - 2016 Ver. 2.0FREDYBelum ada peringkat
- Osmosis InversaDokumen5 halamanOsmosis InversaCecilia Melgarejo HuamanBelum ada peringkat
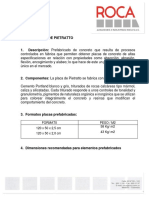
- Ficha Técnica GENERAL PIETRATTODokumen3 halamanFicha Técnica GENERAL PIETRATTOAnglica VargasBelum ada peringkat
- Los 5 Primeros Libros de VitrubioDokumen41 halamanLos 5 Primeros Libros de VitrubioDaniela VillaBelum ada peringkat
- Siembra y Cosecha de Agua HugoDokumen6 halamanSiembra y Cosecha de Agua HugoFIORELABelum ada peringkat
- Ets Ordinario Junio 2019Dokumen1 halamanEts Ordinario Junio 2019carlosBelum ada peringkat
- Diseño de una bomba centrífuga de bajo caudalDokumen24 halamanDiseño de una bomba centrífuga de bajo caudalugotitman0% (1)
- Construccion DL Ponton KM 1217+000 y Accesos Volumen VI PDFDokumen88 halamanConstruccion DL Ponton KM 1217+000 y Accesos Volumen VI PDFTeresa Rivera VilchezBelum ada peringkat
- Fernando Estadistica 2Dokumen15 halamanFernando Estadistica 2fernandoBelum ada peringkat