Anda mungkin juga menyukai
- No Es Lo Mismo ResumenDokumen6 halamanNo Es Lo Mismo ResumenysoldBelum ada peringkat
- Plan de Clase 5 - 6Dokumen6 halamanPlan de Clase 5 - 6Nicole Bennett100% (1)
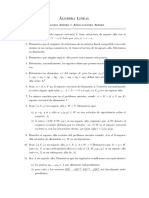
- Ejercicios AL2 PDFDokumen32 halamanEjercicios AL2 PDFLeonardo EspinozaBelum ada peringkat
- AyG T1 EjerciciosDokumen3 halamanAyG T1 Ejerciciosjarlaxlebaenre0Belum ada peringkat
- Bloque 1 EJERCICIOSDokumen10 halamanBloque 1 EJERCICIOSaliciaBelum ada peringkat
- Hoja 6 de Ejs.Dokumen9 halamanHoja 6 de Ejs.Pedro Javier González GarcíaBelum ada peringkat
- Examen Final AlgebraDokumen2 halamanExamen Final AlgebraAndreaBelum ada peringkat
- Problemas 7 AL2020Dokumen9 halamanProblemas 7 AL2020goBelum ada peringkat
- MatD Problemas Tema 1 21-22Dokumen3 halamanMatD Problemas Tema 1 21-22Lia GomezBelum ada peringkat
- Algebra Lineal 2024: Coordenadas, Cambio de Base, Transformaciones Lineales IDokumen3 halamanAlgebra Lineal 2024: Coordenadas, Cambio de Base, Transformaciones Lineales IJuliana RivasBelum ada peringkat
- L2d 16 3mkgyDokumen2 halamanL2d 16 3mkgyfranciscojb.bargettoBelum ada peringkat
- Problemas de Esp - VectDokumen3 halamanProblemas de Esp - VectCarlos Alberto Vara MartínBelum ada peringkat
- Hoja Bloque 3 ConicasDokumen5 halamanHoja Bloque 3 Conicasalbagonzaferrera13Belum ada peringkat
- Vectores Rectas Planos en Certamenes T3Dokumen3 halamanVectores Rectas Planos en Certamenes T3Caterin MoraBelum ada peringkat
- Ejercicios Semana 7 AL2 2021 C2Dokumen9 halamanEjercicios Semana 7 AL2 2021 C2Ramon Martínez CabreraBelum ada peringkat
- Enunciados 1Dokumen5 halamanEnunciados 1Javichu 300Belum ada peringkat
- Práctica 2Dokumen6 halamanPráctica 2Mili aguirreBelum ada peringkat
- MatD Problemas Tema 2 23-24Dokumen5 halamanMatD Problemas Tema 2 23-24Carmen MurguiBelum ada peringkat
- PrimeraOrdinaria AlgebraDokumen3 halamanPrimeraOrdinaria AlgebraJorge MorielBelum ada peringkat
- Guía CompletaDokumen33 halamanGuía CompletahoracioBelum ada peringkat
- Examenes Algebra UvigoDokumen42 halamanExamenes Algebra UvigopealdapoBelum ada peringkat
- Taller 2 - 2019 - 2 PreguntasDokumen4 halamanTaller 2 - 2019 - 2 PreguntasDaniel Alberto Sanchez DelgadilloBelum ada peringkat
- Seminario Algebra Lineal Tercera Practica CalificadaDokumen3 halamanSeminario Algebra Lineal Tercera Practica CalificadaAlex A. Gutierrez ArrietaBelum ada peringkat
- Hoja6 ALG 23 24Dokumen2 halamanHoja6 ALG 23 24ingenauta7282Belum ada peringkat
- Geometría en El EspacioDokumen3 halamanGeometría en El EspacioAndy 8421Belum ada peringkat
- Repaso U1Dokumen2 halamanRepaso U1Eunice RomBelum ada peringkat
- AL Feb2012Dokumen2 halamanAL Feb2012Ads00Belum ada peringkat
- Ejercicios Algebra LinealDokumen32 halamanEjercicios Algebra Linealjjfe0120% (1)
- Problemas MatemáticasDokumen10 halamanProblemas MatemáticasrereeesBelum ada peringkat
- Ejercicios Puntos, Rectas y Planos 2Dokumen2 halamanEjercicios Puntos, Rectas y Planos 2Julian AyalaBelum ada peringkat
- Listado6 520145 T1 2019Dokumen2 halamanListado6 520145 T1 2019Marcelo SalazarBelum ada peringkat
- Conicas UTNDokumen12 halamanConicas UTNPablo Federico ObregonBelum ada peringkat
- Ejercicios Espacios VectorialesDokumen4 halamanEjercicios Espacios VectorialesManolo BareaBelum ada peringkat
- Tema 5 - 2 Ejercicios3Dokumen15 halamanTema 5 - 2 Ejercicios3jose olivalBelum ada peringkat
- 1Dokumen5 halaman1Deysi SilvanaBelum ada peringkat
- Practico 10 PDFDokumen2 halamanPractico 10 PDFEdgar CorreaBelum ada peringkat
- Practica 2Dokumen5 halamanPractica 2Fede MartinezBelum ada peringkat
- Hoja de Problemas Espacios Vectoriales. Tema 4Dokumen3 halamanHoja de Problemas Espacios Vectoriales. Tema 4danielbroceno3sanfranciscoBelum ada peringkat
- Practica 2Dokumen5 halamanPractica 2ABelum ada peringkat
- Soluciones AMII FIUBA Guia I - 1c 2019 - Geometria Del Plano y Del Espacio - SilvinaDokumen14 halamanSoluciones AMII FIUBA Guia I - 1c 2019 - Geometria Del Plano y Del Espacio - Silvinajuaz38Belum ada peringkat
- Examen Matemáticas I Ingeniería MecánicaDokumen1 halamanExamen Matemáticas I Ingeniería MecánicacarmenBelum ada peringkat
- Listado 2Dokumen1 halamanListado 2rlagos.soleBelum ada peringkat
- Prob Espacios VectorialesDokumen4 halamanProb Espacios VectorialesAna RuscherBelum ada peringkat
- P1 Geometria en El Plano y en El Espacio 2017Dokumen4 halamanP1 Geometria en El Plano y en El Espacio 2017vmgataBelum ada peringkat
- Practica VIIIDokumen3 halamanPractica VIIIAvila Castillo EmersonBelum ada peringkat
- L1d 19 1Dokumen3 halamanL1d 19 1Francisco JavierBelum ada peringkat
- AyGA.2C.2022-Práctica de Evaluaciã n.2PDokumen2 halamanAyGA.2C.2022-Práctica de Evaluaciã n.2PleulietmaitenaBelum ada peringkat
- Guia Del Primer Departamental Calculo VectorialDokumen5 halamanGuia Del Primer Departamental Calculo VectorialDiacono10100% (1)
- Guias 0 1 y 2 2C 2017 Guia Fisica 2 FiubaDokumen15 halamanGuias 0 1 y 2 2C 2017 Guia Fisica 2 FiubaSantiago MarianiBelum ada peringkat
- ALGEBRA LINEAL - (Observatorio) A No 2016Dokumen2 halamanALGEBRA LINEAL - (Observatorio) A No 2016Jj LindemannBelum ada peringkat
- 2019 GAP Parcial1Dokumen6 halaman2019 GAP Parcial1Leo EgidoBelum ada peringkat
- Asignación 3Dokumen1 halamanAsignación 3Guillermo Acosta PerezBelum ada peringkat
- 3.conicas ProyectivasDokumen25 halaman3.conicas ProyectivasgidiBelum ada peringkat
- Bases PC4Dokumen10 halamanBases PC4Eldurvatn EldurvatnBelum ada peringkat
- TP 08 TprectasplanoDokumen2 halamanTP 08 TprectasplanoBet BilianskyBelum ada peringkat
- Modelo Examen 2 Fundamentos MatemáticosDokumen8 halamanModelo Examen 2 Fundamentos MatemáticosDanko 13Belum ada peringkat
- Taller 1 C. Vectorial 2020-2Dokumen3 halamanTaller 1 C. Vectorial 2020-2Jacobo MotatoBelum ada peringkat
- Unidad 1Dokumen5 halamanUnidad 1MiguelBelum ada peringkat
- L9 VectoresRectasyPlanosDokumen2 halamanL9 VectoresRectasyPlanosCamilo GuerraBelum ada peringkat
- P9 Espacios VectorialesDokumen2 halamanP9 Espacios VectorialesLaSoñadoraBelûBelum ada peringkat
- Control1 15 16 IndustrialesDokumen2 halamanControl1 15 16 Industrialespabloaragon947Belum ada peringkat
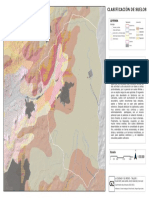
- Edafologico Conjunto. ContodoDokumen1 halamanEdafologico Conjunto. ContodoPilar Mate SanjuanBelum ada peringkat
- Parcial1 ResueltoDokumen9 halamanParcial1 ResueltoPilar Mate SanjuanBelum ada peringkat
- NATURALparamaqDokumen1 halamanNATURALparamaqPilar Mate SanjuanBelum ada peringkat
- TablasDokumen1 halamanTablasPilar Mate SanjuanBelum ada peringkat
- AGRÍCOLAmaquDokumen1 halamanAGRÍCOLAmaquPilar Mate SanjuanBelum ada peringkat
- Balcones LimaDokumen246 halamanBalcones LimaDennis Tuesta100% (2)
- GDA, Cúpulas y BóvedasDokumen26 halamanGDA, Cúpulas y BóvedasPilar Mate SanjuanBelum ada peringkat
- 05A Curvas Cónicas. Elementos Principales y Manejo Con Rhinoceros 4.0Dokumen16 halaman05A Curvas Cónicas. Elementos Principales y Manejo Con Rhinoceros 4.0Pilar Mate SanjuanBelum ada peringkat
- GDA, Curvas de Splein, BézierDokumen19 halamanGDA, Curvas de Splein, BézierPilar Mate SanjuanBelum ada peringkat
- 01B Sobre Intersecciones y Sombras Elementos PoliedricosDokumen1 halaman01B Sobre Intersecciones y Sombras Elementos PoliedricosPilar Mate SanjuanBelum ada peringkat
- 01B Sobre Intersecciones y Sombras Elementos Poliedricos PDFDokumen11 halaman01B Sobre Intersecciones y Sombras Elementos Poliedricos PDFPilar Mate SanjuanBelum ada peringkat
- Caso Práctico PsicoanálisisDokumen16 halamanCaso Práctico PsicoanálisisMaJosé Calderón NogalesBelum ada peringkat
- Declaracion TestimonialDokumen205 halamanDeclaracion TestimonialSintia Liz Rojas SuarezBelum ada peringkat
- Salvia, Agustin (1997) - Presentacion Acerca Del Metodo y El Proceso de Investigacion Social. Notas Teorico-MetodologicasDokumen24 halamanSalvia, Agustin (1997) - Presentacion Acerca Del Metodo y El Proceso de Investigacion Social. Notas Teorico-MetodologicasbryanBelum ada peringkat
- 8 - Español - Secuencia - 10-14 de Julio Elementos de La OraciónDokumen1 halaman8 - Español - Secuencia - 10-14 de Julio Elementos de La OraciónDelfina Geoconda GonzalezBelum ada peringkat
- Gregor Mendel GrettaDokumen21 halamanGregor Mendel GrettaTerry RosalesBelum ada peringkat
- Cuestionario TractatusDokumen3 halamanCuestionario TractatusPaula RossiBelum ada peringkat
- Oración para Una ElecciónDokumen6 halamanOración para Una ElecciónEmanuelBelum ada peringkat
- Hugo Hiriart - A Través Del Espejo ChestertonDokumen1 halamanHugo Hiriart - A Través Del Espejo ChestertonvitrangofeBelum ada peringkat
- Carpeta Pedagogica Maria LlicoDokumen11 halamanCarpeta Pedagogica Maria LlicoOscar Antonio Moncada VasquezBelum ada peringkat
- 1ra Monografia PilotesDokumen5 halaman1ra Monografia PilotesiovicadBelum ada peringkat
- Conceptos Básicos de Fundamentos de Investigación Como Proceso de Construcción Social (F. Investigacion)Dokumen8 halamanConceptos Básicos de Fundamentos de Investigación Como Proceso de Construcción Social (F. Investigacion)Hanck Garcia100% (1)
- Manual Didactico-Pedagogico para La ElabDokumen162 halamanManual Didactico-Pedagogico para La ElabAndres Moreno CastroBelum ada peringkat
- Arbitrage y Mediación en Las AméricasDokumen468 halamanArbitrage y Mediación en Las AméricasIvana Lima Regis100% (2)
- Tarea Semana 6Dokumen2 halamanTarea Semana 6Jc DBelum ada peringkat
- Nacher Francisco - CompendioDokumen21 halamanNacher Francisco - CompendioMayk Joel Quispe GasparBelum ada peringkat
- Evangelismo de ReformaDokumen14 halamanEvangelismo de ReformavicenteBelum ada peringkat
- Mapa Funcional PPT OkDokumen20 halamanMapa Funcional PPT OkEsteban Huamani RojasBelum ada peringkat
- Teoría Estructuralista de La AdministraciónDokumen3 halamanTeoría Estructuralista de La AdministraciónSrBilly OréBelum ada peringkat
- 1.-Curriculo Bachillerato 2009Dokumen242 halaman1.-Curriculo Bachillerato 2009Abaddon AbigorBelum ada peringkat
- Reingeniería y TICDokumen4 halamanReingeniería y TICEdlis LiedBelum ada peringkat
- Taller Cognitivo ConductualDokumen4 halamanTaller Cognitivo ConductualLiLi Polanco RicoBelum ada peringkat
- Lentes Convergentes, Relación Imagen - ObjetoDokumen24 halamanLentes Convergentes, Relación Imagen - ObjetoMauricio BenaventeBelum ada peringkat
- Robots de La AntiguedadDokumen2 halamanRobots de La Antiguedadbenitosierra0% (1)
- Examen Parcial - Semana 4 - RA - SEGUNDO BLOQUE-EL SUJETO SOCIAL EN LA EDUCACION PARA LAS CIENCIAS SOCIALES - (GRUPO1) PDFDokumen13 halamanExamen Parcial - Semana 4 - RA - SEGUNDO BLOQUE-EL SUJETO SOCIAL EN LA EDUCACION PARA LAS CIENCIAS SOCIALES - (GRUPO1) PDFtrabajos universidad100% (1)
- Lo Que Dios Fue Capaz de Hacer Por TiDokumen2 halamanLo Que Dios Fue Capaz de Hacer Por TiWílmar Alexandre Rodríguez Cárdenas100% (1)
- Literatura Neoclasica y RomanticaDokumen41 halamanLiteratura Neoclasica y RomanticaPiter Lucero100% (1)
- TX1-Pablo GLZ - Casanova - Ciencias Sociales PDFDokumen16 halamanTX1-Pablo GLZ - Casanova - Ciencias Sociales PDFMelissa HernándezBelum ada peringkat
- Integrales y Técnicas de Integración - Cálculo Integral PDFDokumen10 halamanIntegrales y Técnicas de Integración - Cálculo Integral PDFGato de Schrödinger AlphaBelum ada peringkat