248
CHAPTER 4 8 BASERAND PULSE TRANSMISSION
Another source of bit errors in a baseband data transmission system is the ubiquitous
channel noise. Naturally, noise and ISI arise in the system simultaneously. However, zg
understand how they affect the performance of the system, we first consider them sep,
rately; later on in the chapter, we study their combined effects.
‘We thus begin the chapter by describing a fundamental result in communication
theory, which deals with the detection of a pulse signal of known waveform that is in.
mersed in additive white noise. The device for the optimum detection of such a pulse
involves the use of a linear-time-invariant filter known as a matched filter,? which is ¢
called because its impulse response is matched to the pulse signal.
| 4.2__Matched Filter
A basic problem that often arises in the study of communication systems is that of detecting
a pulse transmitted over a channel that is corrupted by channel noise (i.e., additive noise
at the front end of the receiver). For the purpose of the discussion presented in this section,
we assume that the major source of system limitation is the channel noise.
Consider then the receiver model shown in Figure 4.1, involving a linear time-invar.
iant filter of impulse response h(t). The filter input x(¢) consists of a pulse signal g(t
corrupted by additive channel noise w(t), as shown by
x(t) = g(t) + w(t), OSt=T (4.1)
where T is an arbitrary observation interval. The pulse signal g(t) may represent a binary
symbol 1 or 0 in a digital communication system. The 1o(t) is the sample function of a
white noise process of zero mean and power spectral density Np/2. It is assumed that the
receiver has knowledge of the waveform of the pulse signal g(t). The source of uncertainty
lies in the noise w(t). ‘The function of the receiver is to detect the pulse signal g(¢) in an
optimum manner, given the received signal x(t). To satisfy this requirement, we have to
optimize the design of the filter so as to minimize the effects of noise at the filter outpat
in some statistical sense, and thereby enhance the detection of the pulse signal g(t).
Since the filter is linear, the resulting output y(t) may be expressed as
ylt) = galt) + n(t) (4.2)
where g,(é) and n(t) are produced by the signal and noise components of the input x(?,
respectively. A simple way of describing the requirement that the output signal component
g.(t) be considerably greater than the output noise component n(2) is to have the filter
make the instantaneous power in the output signal g,(t), measured at time t = T, as large
as possible compared with the average power of the output noise n(t). This is equivalent
to maximizing the peak pulse signal-to-noise ratio, defined as
|gafT)|? 43)
Ebel]
Tear tine
Sel xi] jgneartig: ya yen
al) impulse response Si
Aw sample at
timer eT
ite noise
"o
Figure 4.1 Linear receiver.
4.2 Matched Filter 249
where |g,(T)]? is the instantaneous power in the output signal, E is the statistical expec-
tation operator, and E[n’{t)] is a measure of the average output noise power. The require-
ment is to specify the impulse response h(t) of the filter such that the output signal-to-
noise ratio in Equation (4.3) is maximized,
Let G(f) denote the Fourier transform of the known signal g(t), and H(f) denote
the frequency response of the filter. Then the Fourier transform of the output signal g,(¢)
is equal to Hif)G(f), and g,(t) is itself given by the inverse Fourier transform
ade) = [_ HUNGU) expli2afe df (44)
Hence, when the filter output is sampled at time ¢ = T, we have (in the absence of channel
noise)
2
Ig.(T) |? If. HUf)G(f) exp(j2afT) df (4.5)
Consider next the effect on the filter ourput due to the noise w(:) acting alone. The
power spectral density Sy(f) of the output noise n(t) is equal to the power spectral density
of the input noise w(t) times the squared magnitude response |H(f)|? (see Section 1.7).
Since w(2) is white with constant power spectral density No/2, it follows that
Ni
Su(f) = SP LALA)? (4.6)
The average power of the output noise (2) is therefore
eva) = [san af
7 (4.7)
= 38" nye ar
Thus substituting Equations (4.5) and (4.7) into (4.3), we may rewrite the expression
for the peak pulse signal-to-noise ratio as
7 2
[Benen expciaapn af
eng eee (4.8)
Ng
Nef ime af
Our problem is to find, for a given G(f), the particular form of the frequency response
H{f) of the filter that makes 7) a maximum. To find the solution to this optimization
problem, we apply a mathematical result known as Schwarz’s inequality to the numerator
of Equation (4.8).
A derivation of Schtvarz’s inequality is given in Chapter 5. For now it suffices to say
that if we have two complex functions (x) and $(x) in the real variable x, satisfying
the conditions
[law ae ce
and
Fi les? ae
Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Satellite LaunchingDokumen25 halamanSatellite LaunchingSivaranjan GoswamiBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Binary CodingDokumen3 halamanBinary CodingSivaranjan GoswamiBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Siv PythonDokumen19 halamanSiv PythonSivaranjan GoswamiBelum ada peringkat
- Friendship and Inheritance in Object Oriented Programming With C++Dokumen11 halamanFriendship and Inheritance in Object Oriented Programming With C++Sivaranjan Goswami100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- PPP - Point To Point ProtocolDokumen6 halamanPPP - Point To Point ProtocolSivaranjan Goswami100% (1)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Introduction To RadarsDokumen4 halamanIntroduction To RadarsSivaranjan GoswamiBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Process in Operating SystemDokumen5 halamanProcess in Operating SystemSivaranjan GoswamiBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Image Compression Using DCTDokumen10 halamanImage Compression Using DCTSivaranjan Goswami100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Friendship, Inheritance and File Management in C++Dokumen11 halamanFriendship, Inheritance and File Management in C++Sivaranjan Goswami100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- A Tutorial On Transistor Based Circuit DesignDokumen16 halamanA Tutorial On Transistor Based Circuit DesignSivaranjan Goswami100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- 8051 Interrupt and Timer Using CDokumen12 halaman8051 Interrupt and Timer Using CSivaranjan Goswami100% (2)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Antenna TutorialDokumen20 halamanAntenna TutorialSivaranjan Goswami0% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Guide To Assembly Code-TMS320C5xDokumen314 halamanGuide To Assembly Code-TMS320C5xSivaranjan Goswami0% (1)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- ZCR Based Identification of Voiced Unvoiced and Silent Parts of Speech Signal in Presence of Background NoiseDokumen30 halamanZCR Based Identification of Voiced Unvoiced and Silent Parts of Speech Signal in Presence of Background NoiseSivaranjan GoswamiBelum ada peringkat
- A Review On Four Different Methods of FloorplanningDokumen13 halamanA Review On Four Different Methods of FloorplanningSivaranjan GoswamiBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- AM Trans-ReceiverDokumen39 halamanAM Trans-ReceiverSivaranjan GoswamiBelum ada peringkat
- 8051 Programming Ready ReferenceDokumen4 halaman8051 Programming Ready ReferenceSivaranjan Goswami100% (1)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- HFSS ScriptingDokumen420 halamanHFSS ScriptingSivaranjan GoswamiBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Touch ScreenDokumen2 halamanTouch ScreenSivaranjan GoswamiBelum ada peringkat
- Organizational ConflictDokumen22 halamanOrganizational ConflictTannya AlexandraBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Excon2019 ShowPreview02122019 PDFDokumen492 halamanExcon2019 ShowPreview02122019 PDFSanjay KherBelum ada peringkat
- Pavement Design1Dokumen57 halamanPavement Design1Mobin AhmadBelum ada peringkat
- Opc PPT FinalDokumen22 halamanOpc PPT FinalnischalaBelum ada peringkat
- Regions of Alaska PresentationDokumen15 halamanRegions of Alaska Presentationapi-260890532Belum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Broken BondsDokumen20 halamanBroken Bondsapi-316744816Belum ada peringkat
- Project - New Restuarant Management System The Grill HouseDokumen24 halamanProject - New Restuarant Management System The Grill HouseMayank Mahajan100% (3)
- Objective & Scope of ProjectDokumen8 halamanObjective & Scope of ProjectPraveen SehgalBelum ada peringkat
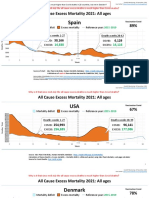
- Countries EXCESS DEATHS All Ages - 15nov2021Dokumen21 halamanCountries EXCESS DEATHS All Ages - 15nov2021robaksBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- IEC ShipsDokumen6 halamanIEC ShipsdimitaringBelum ada peringkat
- Cisco SDWAN Case Study Large Global WANDokumen174 halamanCisco SDWAN Case Study Large Global WANroniegrokBelum ada peringkat
- De Thi Hoc Ki 1 Mon Tieng Anh Lop 5 Co File NgheDokumen10 halamanDe Thi Hoc Ki 1 Mon Tieng Anh Lop 5 Co File Nghetuyen truongBelum ada peringkat
- Salads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDokumen1.092 halamanSalads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDebora PanzarellaBelum ada peringkat
- DarcDokumen9 halamanDarcJunior BermudezBelum ada peringkat
- Working Capital in YamahaDokumen64 halamanWorking Capital in YamahaRenu Jindal50% (2)
- Retailing in IndiaDokumen11 halamanRetailing in IndiaVinod MalkarBelum ada peringkat
- Snapdragon 435 Processor Product Brief PDFDokumen2 halamanSnapdragon 435 Processor Product Brief PDFrichardtao89Belum ada peringkat
- CAT 320D2: Hydraulic ExcavatorDokumen5 halamanCAT 320D2: Hydraulic Excavatorhydeer 13Belum ada peringkat
- User S Manual AURORA 1.2K - 2.2KDokumen288 halamanUser S Manual AURORA 1.2K - 2.2KEprom ServisBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Oracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Dokumen50 halamanOracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Mario Vilchis Esquivel100% (1)
- Costbenefit Analysis 2015Dokumen459 halamanCostbenefit Analysis 2015TRÂM NGUYỄN THỊ BÍCHBelum ada peringkat
- DPSD ProjectDokumen30 halamanDPSD ProjectSri NidhiBelum ada peringkat
- Azimuth Steueung - EngDokumen13 halamanAzimuth Steueung - EnglacothBelum ada peringkat
- Leigh Shawntel J. Nitro Bsmt-1A Biostatistics Quiz No. 3Dokumen6 halamanLeigh Shawntel J. Nitro Bsmt-1A Biostatistics Quiz No. 3Lue SolesBelum ada peringkat
- OZO Player SDK User Guide 1.2.1Dokumen16 halamanOZO Player SDK User Guide 1.2.1aryan9411Belum ada peringkat
- NDY 9332v3Dokumen8 halamanNDY 9332v3sulphurdioxideBelum ada peringkat
- GT-N7100-Full Schematic PDFDokumen67 halamanGT-N7100-Full Schematic PDFprncha86% (7)
- 2009 2011 DS Manual - Club Car (001-061)Dokumen61 halaman2009 2011 DS Manual - Club Car (001-061)misaBelum ada peringkat
- Specificities of The Terminology in AfricaDokumen2 halamanSpecificities of The Terminology in Africapaddy100% (1)
- Pt3 English Module 2018Dokumen63 halamanPt3 English Module 2018Annie Abdul Rahman50% (4)