MNRAS 000, 1–16 (2017) Preprint 24 October 2018 Compiled using MNRAS LATEX style file v3.
Deep multi-survey classification of variable stars
C. Aguirre,1? K. Pichara,1,2,3 † I. Becker1 ‡
1 Computer Science Department, Pontificia Universidad Católica de Chile.
2 Millennium Institute of Astrophysics, Chile
3 Institute of Applied Computational Science (IACS), Harvard. Cambridge, MA, USA.
Accepted XXX. Received YYY; in original form ZZZ
arXiv:1810.09440v1 [astro-ph.IM] 21 Oct 2018
ABSTRACT
During the last decade, a considerable amount of effort has been made to classify
variable stars using different machine learning techniques. Typically, light curves are
represented as vectors of statistical descriptors or features that are used to train vari-
ous algorithms. These features demand big computational powers that can last from
hours to days, making impossible to create scalable and efficient ways of automatically
classifying variable stars. Also, light curves from different surveys cannot be integrated
and analyzed together when using features, because of observational differences. For
example, having variations in cadence and filters, feature distributions become biased
and require expensive data-calibration models. The vast amount of data that will
be generated soon make necessary to develop scalable machine learning architectures
without expensive integration techniques. Convolutional Neural Networks have shown
impressing results in raw image classification and representation within the machine
learning literature. In this work, we present a novel Deep Learning model for light
curve classification, mainly based on convolutional units. Our architecture receives
as input the differences between time and magnitude of light curves. It captures the
essential classification patterns regardless of cadence and filter. In addition, we intro-
duce a novel data augmentation schema for unevenly sampled time series. We tested
our method using three different surveys: OGLE-III; Corot; and VVV, which differ in
filters, cadence, and area of the sky. We show that besides the benefit of scalability, our
model obtains state of the art levels accuracy in light curve classification benchmarks.
Key words: light curves – variable stars – supervised classification – neural net –
deep learning
1 INTRODUCTION demand large computational resources and aim to represent
the most relevant characteristics of light curves. A lot of ef-
There has been a considerable amount of effort trying to au-
fort has been made to design these features, and the creation
tomate the classification of variable stars (Debosscher et al.
of new ones implies a lot of time and research. The future
2007; Sarro et al. 2009; Bloom & Richards 2011; Pichara
surveys in Astronomy demand new ways of extracting these
et al. 2012; Nun et al. 2015; Mackenzie et al. 2016; Pichara
features. One example of the huge amount of data is The
et al. 2016b; Benavente et al. 2017). Variable stars such as
Large Synoptic Survey Telescope (LSST) (Borne et al. 2007;
RR Lyrae, Mira, and Cepheids are important for distant
Abell et al. 2009) that will start operating on 2022. It is es-
ladder measurements as shown in Bloom & Richards 2011.
timated that the LSST will produce 15 to 30TB of data per
The ability to classify variable stars is closely related to the
night. New ways of treating this information have been pro-
way light curves are represented. One way is to create vec-
posed (Mackenzie et al. 2016; Valenzuela & Pichara 2017a;
tors of statistical descriptors, called features, to represent
Naul et al. 2017; Gieseke et al. 2017). Mackenzie et al. 2016’s
each light curve (Bloom & Richards 2011; Nun et al. 2015).
uses an unsupervised feature learning algorithm to classify
One of the most popular set of statistical features is pre-
variable stars. Valenzuela & Pichara 2017a perform unsuper-
sented in Nun et al. (2015), also known as FATS features
vised classification by extracting local patterns among light
(stands for Feature Analysis for Time Series). These vectors
curves and create a ranking of similarity. To extract such
patterns they use a sliding window as done in Mackenzie
et al. 2016.
? E-mail: claguirre@uc.cl
† E-mail: kpb@ing.puc.cl Either way, none of these methods can be applied im-
‡ E-mail: iebecker@uc.cl mediately in new surveys. The limited overlap and depth
© 2017 The Authors
2 Carlos Aguirre et al.
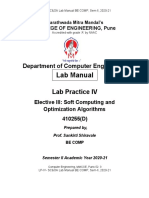
Figure 1. Comparison of RR Lyrae ab and Cepheid stars in OGLE-III, VISTA and Corot Survey respectively. Difference between
magnitude and cadence is shown.
coverage among surveys makes difficult to share data. The past. The power of current telescopes and the amount of
difference in filter and cadence makes it even harder without data they generate have practically solved the problem. The
any transformation to the data. Figure 1 shows an example improves in technology and the big amount of data makes
of the complexity that exists among stars and surveys. Light ANNs feasible for the future challenges in astronomy.
curves have a difference in magnitude and time, and most Artificial neural networks or deep neural networks cre-
of the time they are not human-eye recognizable, even by ate their own representation by combining and encoding the
experts. Since all the magnitudes are calibrated by using input data using non-linear functions (LeCun et al. 2015).
statistics, it does not work correctly because of underlying Depending on the number of hidden layers, the capacity
differences between surveys. Figure 2 shows a comparison of extracting features improve, together with the need for
of statistical features of RR Lyrae ab stars using three dif- more data (LeCun et al. 2015). Convolutional neural net-
ferent catalogs. To the best of our knowledge, little efforts works (CNNs) are a particular type of neural network that
have been made to create invariant training sets within the have shown essential advantages in extracting features from
datasets. Benavente et al. 2017 proposed an automatic sur- images (Krizhevsky et al. 2012). CNNs use filters and con-
vey invariant model of variable stars transforming FATS sta- volutions that respond to patterns of different spatial fre-
tistical vectors (Nun et al. 2015) from one survey to another. quency, allowing the network to learn how to capture the
As previously mentioned, these features have the problem most critical underlying patterns and beat most of the clas-
of being computationally expensive and the creation of new sification challenges (Krizhevsky et al. 2012). Time series,
ones implies a lot of time and research. Therefore, there is a as well as in images, have also proven to be a suitable field
necessity of faster techniques able to use data from different for CNNs (Zheng et al. 2014; Jiang & Liang 2016).
surveys. In this paper, we propose a convolutional neural net-
Artificial neural networks (ANNs) have been known for work architecture that uses raw light curves from different
decades (Cybenko 1989; Hornik 1991), but the vast amount surveys. Our model can encode light curves and classify be-
of data needed to train them made them infeasible in the tween classes and subclasses of variability. Our approach
MNRAS 000, 1–16 (2017)
Paper 3
does not calculate any of the statistical features such as the
ones proposed in FATS, making our model scalable to vast
amounts of data. In addition, we present a novel data aug-
mentation schema, specific for light curves, used to balance
the proportion of training data among different classes of
variability. Data augmentation techniques are widely used
in the image community (Krizhevsky et al. 2012; Dieleman
et al. 2015; Gieseke et al. 2017).
We present an experimental analysis using three
datasets: OGLE-III (Udalski 2004), VISTA (Minniti et al.
2010) and Corot (Baglin et al. 2002; Bordé et al. 2003). The
used datasets differ in filters, cadence and observed sky-area.
Our approach obtains comparative results with a Random
Forest (RF) classifier, the most used model for light curve
classification (Richards et al. 2011; Dubath et al. 2011; Long
et al. 2012; Gieseke et al. 2017), that uses statistical features.
Finally, we produce a catalog of variable sources by cross-
matching VISTA and OGLE-III and made it available for
the community. 1 .
The remainder of this paper is organized as follows: Sec-
tion 2 gives an account of previous work on variable stars
classification and convolutional neural networks. In Section 3
we introduce relevant background theory. Section 4 explains
our architecture and Section 5 describes the datasets that
are used in our experiments. Section 6 explains the modi-
fications that are made to the data and Section 7 gives an
account of the parameters that are used in the architecture.
Section 8 shows our experimental analysis and Section 8.1
presents a study of the time complexity of our model. Fi-
nally, in Section 9, the main conclusions and future work
directions are given.
2 RELATED WORK
As mention before, there has been huge efforts to classify
variable stars (Richards et al. 2011; Nun et al. 2015, 2014;
Huijse et al. 2014; Mackenzie et al. 2016; Pichara et al.
2016a; Valenzuela & Pichara 2017b). The main approach
has been the extraction of features that represent the infor- Figure 2. Comparison of FATS feature in RR Lyrae ab using his-
mation of light curves. Debosscher et al. 2007 was the first togram plots of stars using OGLE-III, Corot and Vista Surveys.
Every feature is shown with its relative importance in classifica-
one proposing 28 different features extracted from the pho-
tion as mention in Nun et al. 2015.
tometric analysis. Sarro et al. 2009 continue the work by
introducing the color information using the OGLE survey
and carrying out an extensive error analysis. Richards et al. put together in a Python library2 . Kim & Bailer-Jones 2016
2011 use 32 periodic features as well as kurtosis, skewness, publish a library for variable stars classification among seven
standard deviation, and stetson, among others, for variable classes and subclasses. The library extracts sixteen features
stars classification. Pichara et al. 2012 improve quasars de- that are considered survey-invariant and uses random forest
tection by using a boosted tree ensembles with continuous for doing the classification process.
auto regressive features (CAR). Pichara & Protopapas 2013 A novel approach that differs from most of the previ-
introduce a probabilistic graphical model to classify variable ous papers is proposed by Mackenzie et al. 2016. He face
stars by using catalogs with missing data. the light curve representation problem by designing and im-
Kim et al. 2014 use 22 features for classifying classes plementing an unsupervised feature learning algorithm. His
and subclasses of variable stars using random forest. Nun work uses a sliding window that moves over the light curve
et al. 2015 published a library that facilitates the extraction and get most of the underlying patterns that represent ev-
of features of light curves named FATS (Feature Analysis ery light curve. This window extracts features that are as
for Time Series). More than 65 features are compiled and good as traditional statistics, solving the problem of high
computational power and removing the human from the
1 Datasets will be available in
http://gawa.academy.org/profile/<authorusername>/. A Data 2 Information about the features and manuals of how to use them
Warehouse for astronomy (Machin et al. 2018) are available as well.
MNRAS 000, 1–16 (2017)
4 Carlos Aguirre et al.
pre-processing loop. Mackenzie et al. 2016 work shows that
automatically learning the representation of light curves is
possible.
Since every survey has different cadences and filters, re-
search has been done to learn how to transfer information
among them. The ability to use labeled information with-
out an extensive work accelerates the process of bringing
new labeled datasets to the community. Long et al. 2012
propose using noise and periodicity to match distributions
of features between catalogs. Also, show that light curves
with the same source and different surveys would normally
have different values for their features. Benavente et al. 2017
represent the joint distribution of a subset of FATS features
Figure 3. The forming basic unit the perceptron. It combines the
from two surveys and creates a transformation between them inputs with their respective weights and apply a non-linear func-
by using a probabilistic graphical model with approximate tion to produce the output. A bias b0 is added to each perceptron
inference. Even though he use FATS for his experiments, letting it change the starting point.
they can be easily changed to Mackenzie et al. 2016 fea-
tures, making the process even faster. Pichara et al. 2016b
present a meta-classification approach for variable stars. He 3.1 Artificial Neural Networks
show an interesting framework that combines classifiers pre- Artificial neural networks (ANN) are computational mod-
viously trained in different sets of classes and features. His els based on the structure and functions of biological ax-
approach avoids to re-train from scratch on new classifica- ons (Basheer & Hajmeer 2000). The ability for axons to
tion problems. The algorithm learns the meta-classifier by transmit, learn and forget information has been the inspi-
using features, but including their computational cost in the ration for neural networks. ANNs are capable of extracting
optimization of the model. complex patterns from the input data using nonlinear func-
All methods mentioned above invest lots of efforts find- tions and learn from a vast amount of observed data. ANNs
ing a way to represent light curves. There have been several have been used in different areas such as speech recognition
works in deep learning where the network itself is the one (Graves et al. 2013; Xiong et al. 2016, 2017), image recogni-
in charge of learning the representation of data needed for tion (Krizhevsky et al. 2012; Szegedy et al. 2015; Ren et al.
classification. Baglin et al. 2002 use a vanilla neural network 2015), and language translation (Jean et al. 2014; Sutskever
for classifying microlensing light curves from other types of et al. 2014) among others.
curves such as variable stars. Belokurov et al. 2003 continue The basic forming unit of a neural network is the percep-
the work presenting two neural networks for microlensing tron (as axon in biology). As shown in Figure 3 a perceptron
detection. Krizhevsky et al. 2012 show the importance of takes inputs and combine them producing one output. For
CNNs for image-feature-extraction, and use them to classify, each of the input, it has an associative weight wi that rep-
achieving impressive results. Zeiler & Fergus 2014 study the resent the importance of that input, and a bias b0 is added
importance of using filters in each convolutional layer and to each perceptron. The perceptron combines those inputs
explain the feature extraction using the Imagenet dataset. with their respective weights in a linear form and then uses
Dieleman et al. 2015 apply galaxy morphology classification a non-linear activation function to produce the output:
using deep convolutional neural networks. Cabrera-Vives
et al. 2017 use a rotation-invariant convolutional neural net- N
!
work to classify transients stars in the HITS survey. Mahabal
Õ
Out put = f wi · xi + b0 (1)
et al. 2017 transform light curves into a two-dimensional ar- i=1
ray and perform classification with a convolutional neural
network. Where f is the activation function. Two of the most
CNNs not only work on images. Many studies have been widely used activation functions are the tanh and the sigmoid
done using one-dimensional time series. Zheng et al. 2014 function because of their space complexity. Moreover, relu
use them to classify patient’s heartbeat using a multi-band functions are widely used in convolutions as they avoid sat-
convolutional neural network on the electrocardiograph time uration and are less computationally expensive.
series. Jiang & Liang 2016 create a decision maker for a
cryptocurrency portfolio using a CNN on the daily price 1
sigmoid(x) = (2)
information of each coin. 1 + e−x
e x − e−x
tan(x) = (3)
e x + e−x
relu(x) = max(0, x) (4)
3 BACKGROUND THEORY
The most basic neural network is the vanilla architec-
In this section, we introduce the basics on both artificial ture consisting of three layers: (i) the input layer, (ii) the
neural networks and convolutional neural networks, to gain hidden layer and (iii) the output layer. As shown in Figure
the necessary insights on how our method works. 4 the input of a perceptron is the output of the previous
MNRAS 000, 1–16 (2017)
Paper 5
Figure 4. A vanilla neural network with an input, hidden and
output layer. Total number of hyperparameters 17.
one, except for the input layer that does not have any input
and the output layer that does not have any output. A fully
connected layer is when every neuron in one layer connects
to every neuron in the other one. The vanilla architecture Figure 5. Step by step of a convolution process. A sliding window
consists of two fully connected layers. and a moving step are applied to the data and given as an input
to the next layer.
The number of perceptrons for each layer depends on
the architecture chosen and therefore the complexity of the
model. A neural network can have hundreds, thousands or
the inverse of the gradient and a learning rate as shown in
millions of them. The experience of the team, as well as
Werbos 1990.
experimenting different architectures, is critical for choosing
Training artificial neural networks with backpropaga-
the number of layers, perceptrons for each one and the num-
tion can be slow. Many methods have been proposed based
ber of filters to be used. The number of hyperparameters is
on stochastic gradient descent (SGD) (Ruder 2016). The
mainly given by the weights in the architecture. The input
massive astronomical datasets make training infeasible in
layer is where we submit our data and has as many neurons
practice, and mini-batches are used to speed up the process
as our input does. The hidden layer is the one in charge of
(LeCun et al. 1998). A training epoch corresponds to a pass
combining the inputs and creating a suitable representation.
over the entire dataset, and usually, many epochs are needed
Finally, the number of neurons in the output layer is as many
to achieve good results. The way weights are updated can
classes we want to classify.
change as well. One of the most widely used optimizers has
Many architectures have been proposed for artificial
been Adam optimizer as describe in Kingma & Ba 2014. It
neural networks. The vanilla architecture can be modified
relies on the first moment (mean) and second moment (vari-
in the number of hidden layers and the number of per-
ance) of the gradient to update the learning rates. Ruder
ceptrons per layer. ANNs with one hidden layer using sig-
2016 present an overview of the different gradient descent
moid functions are capable of approximating any continuous
optimizers and the advantages and disadvantages for each
functions on a subset of Rn (Cybenko 1989). However, the
one.
number of neurons needed to do this increases significantly,
which could be computationally infeasible. Adding more lay-
ers with fewer perceptrons can achieve same results without
3.2 Convolutional Neural Nets
affecting the performance of the net (Hornik 1991). More
than three hidden layers are considered deep neural net- Convolutional neural networks (CNN) are a type of deep
works (DNN). DNNs extract information or features com- neural network widely used in images (Krizhevsky et al.
bining outputs from perceptrons, but the number of weights 2012; LeCun et al. 2015). It consists of an input and out-
and data needed to train them significantly increases (Le- put layer as well as several hidden layers different from fully
Cun et al. 2015). connected ones.
To train artificial neural networks we find the weights A convolutional layer is a particular type of hidden layer
that minimize a loss function. For classification purpose, used in CNNs. Convolutional layers are in charge of extract-
one of the most use loss functions is the categorical cross- ing information using a sliding window.As shown in Figure 5
entropy for unbalanced datasets (De Boer et al. 2005). Ini- the window obtains local patterns from the input and com-
tially, weights are chosen at random and are updated be- bines them linearly with its weights (dotted line). Then ap-
tween epochs. We compare the desired output with the ac- ply a nonlinear function and pass it to the next layer. The
tual one and pursue to minimize the loss function using back- sliding window moves and extracts local information using
propagation with any form of Stochastic Gradient Descent different inputs but with the same weights. The idea is to
(SGD) (Ruder 2016). Then we update each weight using specialize this window to extract specific information from
MNRAS 000, 1–16 (2017)
6 Carlos Aguirre et al.
local data updating its weights. The size of the window, as Our convolution does not use a max-pooling layer as
well as the moving step, are chosen before running the ar- done in Jiang & Liang 2016. We avoid max-pooling because
chitecture. Each window corresponds to a specific filter. The of the low cadence of Vista Survey and the detriment of
number of windows is chosen beforehand. The number of fil- losing information. The step function sw was set to 2 or 12
ters can be seen as the number of features we would like to days (considering OGLE cadence of 6 days as average) and
extract. Convolutions are widely used because of their ca- the sliding window tw was set to 42 points or 250 days as
pacity of obtaining features with their translation invariant done in Mackenzie et al. 2016; Valenzuela & Pichara 2017a.
characteristic using shared weights (Krizhevsky et al. 2012).
Zeiler & Fergus 2014 study the importance of using filters
inside each convolutional layer and show the activation pro- 4.3 Second Convolution
cess of using different filters on the Imagenet dataset.
After applying convolutional layers, a fully connected After applying one convolution, we employ another one to
layer is used to mix the information extracted by the con- mix and create more complex features. Jiang & Liang 2016
volutional layers. Fully-connected hidden layers are added showed that using two convolutions achieves better results.
to create more complex representations. Finally, the output As the first convolution, the number of filters is given
layer has as many nodes as classes we need. by S2 , and it was established to be half of the filters used in
the first convolution.
4 METHOD DESCRIPTION
4.4 Flatten Layer
We propose an architecture that can classify variable stars
using different surveys. We now explain each layer of our After extracting the local patterns, we transform the last
architecture, depicted in Figure 6. convolution into a flatten layer as in Jiang & Liang 2016;
Our architecture transforms each light curve to a matrix Zheng et al. 2014. Our layer combines its patterns afterwards
representation using the difference between points. We use with a hidden layer in a fully connected way.
two convolutional layers for extracting the local patterns and
turn them into a flat layer. Two fully connected layers are
used, and an output layer is plugged at the end to perform 4.5 Hidden Layer
the classification. In the following subsections, we describe We use a hidden layer to combine our extracted patterns,
and give insights on each of the layers. and the number of cells is given by ncells . After several ex-
periments, we realize that 128 cells generate the best results.
4.1 Pre-processing We perform many experiments using sigmoid, relu and tanh
activating functions. We obtain the best results using tanh
In this phase, light curves are transformed into a matrix. activation, as most of the deep learning literature suggests
Having a balanced dataset is critical for our purpose of (LeCun et al. 1998).
multi-survey classification. Therefore, we use NM ax as the
maximum number of stars we can extract per class and sur-
vey. Section 6.3 explains in detail the selection of the light 4.6 Softmax Layer
curves for the database.
We transform each of these light curves in a matrix rep- In the output layer, there is one node per each of the possible
resentation of size 2 × N where 2 corresponds to the number variability classes. We test two different amount of classes:
of channels (time and magnitude) and N to the number of one for 4 classes of variable stars and the other for 9 sub-
points used per light curve. Figure 7 shows an example of a classes. We use a so f tmax function to shrink the output to
light curve in a matrix representation. the [0, 1] range. We can interpret the numbers from the out-
To compare light curves between catalogs a reshape to put nodes as the probability that the light curve belongs to
the matrix must be made. Light curves differ in magnitude the class represented by that node.
and time and for comparing them the difference between Finally, we minimize the average across training using
observations was used. A matrix of size M ×2× N was created categorical cross entropy. We use categorical cross entropy as
where M, 2 and N corresponds to the number of light curves, our loss function as we obtained best results and the datasets
channels, and numbers of observations used. Figure 7 shows use are unbalanced.
an example of the transformation of a light curve. Section
6.1 explains in detail this part of the process.
5 DATA
4.2 First Convolution
We apply our method to variable star classification using
We apply a convolutional layer to each of the channels in three different surveys: ”The Optical Gravitational Lensing
separate branches with shared weights. We use a shared Experiment” (OGLE) (Udalski 2004), ”The Vista Variable
convolutional layer to preserve the objective of integrating in the Via Lactea” (VVV) (Minniti et al. 2010) and ”Convec-
datasets with different cadences. Shared layers mean that tion, Rotation and planetary Transit” (CoRot) (Baglin et al.
each of the filters is the same on every tower. The number 2002; Bordé et al. 2003). We select these surveys because of
of filters is given by S1 . We chose 64 filters, to match the their difference in cadence and filters. In the following sub-
number of features presented in Nun et al. 2015. sections, we explain each of these surveys in detail.
MNRAS 000, 1–16 (2017)
Paper 7
Figure 6. The Convolutional Network Architecture for multi-survey.
5.1 OGLE-III Table 1. Class distribution of OGLE-III labeled set.
The Optical Gravitational Lensing Experiment III (OGLE-
Class name Abbreviation Num. of Stars
III) corresponds to the third phase of the project (Udalski
2004). Its primary purpose was to detect microlensing events Classical Cepheids CEP 8031
and transiting planets in four fields: the galactic bulge, the RR Lyrae RRLyr 44262
large and small Magellanic clouds and the constellation of Long Period Variables LPV 343816
Carina. Eclipsing Binaries ECL 55863
For our experiment, we use 451, 972 labeled light curves.
The cadence is approximately six days and in the experi- Subclass Name Abbreviation Num. of Stars
ments is considered our survey with medium cadence. The
First-Overtone 10
band used by the survey is infrared and visible. We discard Classical Cepheid CEP10 2886
the visible band because of the low number of observations Fundamental-Mode F
per star compared to the infrared band. The class distribu- Classical Cepheid CEPF 4490
tion is shown in Table 1. RR Lyrae ab RRab 31418
RR Lyrae c RRc 10131
Mira Mira 8561
Semi-Regular Variables SRV 46602
5.2 The Vista Variable in the Vı́a Láctea Small Amplitude Red Giants OSARGs 288653
The Visible and Infrared Survey Telescope (Vista) started Contact Eclipsing Binary EC 51729
working in February 2010 (Minniti et al. 2010). Its mission Semi-Detached
Eclipsing Binary nonEC 4134
was to map the Milky Way bulge and a disk area of the
center of the Galaxy.
To obtain labeled light curves from Vista, we cross-
MNRAS 000, 1–16 (2017)
8 Carlos Aguirre et al.
Table 2. Class distribution of VVV labelled set.
Class name Abbreviation Num. of Stars
Classical Cepheids CEP 36
RR Lyrae RRLyr 15228
Long Period Variables LPV 228606
Eclipsing Binaries ECL 2604
Subclass Name Abbreviation Num. of Stars
First-Overtone 10
Classical Cepheid CEP10 5
Fundamental-Mode F
Classical Cepheid CEPF 23
RR Lyrae ab RRab 10567
RR Lyrae c RRc 4579
Mira Mira 8445
Semi-Regular Variables SRV 37366
Small Amplitude Red Giants OSARGs 182795
Contact Eclipsing Binary EC 1818
Semi-Detached
Eclipsing Binary nonEC 786
Table 3. Class distribution of CoRoT labelled set.
Class name Abbreviation Num. of Stars
Classical Cepheids CEP 125
RR Lyrae RRLyr 509
Long Period Variables LPV 109
Eclipsing Binaries ECL 568
Subclass Name Abbreviation Num. of Stars
RR Lyrae ab RRab 28
RR Lyrae c RRc 481
Because of its early stage, just a few instances have
been labeled. For our experiments, we use 1, 311 labeled light
curves. The cadence of the observations are approximately
Figure 7. Each light curve is transformed using a matrix with two every sixty per day and in the experiments is considered our
channels, time and magnitude. For every channel, the maximum
survey with a high cadence. This catalog does not use any
number of points is N . Each light curve is transformed using the
specific filter but the observations per object are in red, blue
difference between points and a new matrix is created with two
channels. and green bands and for the experiments, we used the white
band combining this three. The class distribution is shown
in Table 3
match the Vista catalog with OGLE-III. We found 246, 474
stars in total. The cadence of the observations are approx-
imately every eighteen days and is considered our survey
6 DATA PRE-PROCESSING
with low cadence. The band used by the survey is mainly
k ps , and the class distribution of the labeled subset is shown In this section, we explain in detail how to pre-process the
in Table 2. data to produce our architecture inputs. Given that we are
integrating several surveys that contain light curves with
different bands and number of observations, we have to pre-
5.3 CoRoT process the data to get a survey-invariant architecture.
The Convection, Rotation and planetary Transits (CoRoT)
is a telescope launched in December 2016 (Baglin et al. 2002;
6.1 Time & Magnitude Difference
Bordé et al. 2003). Its main purpose is to continuously ob-
serve the milky way for periods up to 6 months and search The difference between instruments, cadences and bands be-
for extrasolar planets using transit photometry. One of the tween surveys create a bias in the variability patterns of light
main advantages is the high cadence that can be more than curves (Long et al. 2012; Benavente et al. 2017). We use as
a 100 observations per object per day. an input the difference between the time and magnitude
MNRAS 000, 1–16 (2017)
Paper 9
parameter goes up every time the light curve has been repli-
cated making the starting point different for each new data
of a specific class and survey. Figure 8 shows an example
of the replication of a light curve. Is important to note for
surveys with high and medium cadences such as Corot and
OGLE-III, the loss is not critical as many observations are
available. In cases of low cadence catalogs, such as Vista,
the loss of observations is significantly reduced depending
on the step parameter. To keep a minimum observation loss,
the step parameter is set to a random number between 0
and 2. The maximum replication of a light curve is 5.
7 PARAMETER INITIALIZATION
As in most of deep learning solutions, our architecture needs
the set up of several initial parameters. In this section, we
Figure 8. Example of a new light curve using a burning param- explain the model design and how to set up its parameters.
eter of 2 and a step parameter of 1.
7.1 Parameters
with the previous measurements. This removes the extinc- As previously noted, surveys have different optics and ob-
tion, distance and survey specific biases. Moreover, it acts servation strategies which impact the depth at which they
as a normalization method. It enables the network to learn can observe. This impacts the number of variable stars de-
patterns directly from the observations without the need to tected and cataloged. In our case, OGLE has been operating
pre-processing any of the data or extinction correction. longer and observes large portions of the sky while VVV goes
deeper but in a smaller area, and Corot has great time res-
6.2 Light Curve padding olution but is considerably shallower. The combined catalog
is dominated by OGLE stars and the subclasses are highly
The difference in cadence among OGLE-III, Vista, and unbalanced, being the LPV class the majority of them.
Corot catalogs create a big variance in the number of ob- In order to train with a more balanced dataset, we use
servations per light curve. To overcome this problem, we a limit of 8, 000 stars per class and survey. We test different
impose a minimum number of observations and use a zero values and set it to 8, 000 as most of the classes and sub-
padding to complete the light curves that cannot reach that classes of VISTA and OGLE survey possess that amount as
minimum. This is inspired by the padding procedure done shown in section 5. Finally, after several experiments mea-
in deep learning for image analysis. To define such limit, we suring the training speed and efficiency, we set the batch size
tried many different values and notice that classification re- to 256. Table 4 shows a summary of the parameters of our
sults do not change significantly within a range of 500 and architecture.
1, 500 observations. We fixed the limit at 500 points per light
curve because that amount preserves the classification ac-
curacy and keeps most of the light curves suitable for our 7.2 Layers
analysis.
We use two convolutional layers as done in Jiang & Liang
2016. In the imaging literature, several works show that one
6.3 A Light curve data augmentation model convolutional layer is not enough to learn a suitable repre-
sentation, and commonly they use two convolutions (Zheng
Hensman & Masko 2015 studied the impact of unbalanced et al. 2014; Jiang & Liang 2016; Gieseke et al. 2017).
datasets in convolutional neural networks and proved that We try using only one convolution and performance was
for better classification performance the dataset should be critically reduced. Three convolutions are also utilized, pro-
class-balanced. Since the datasets used in this paper are un- ducing results as good as using two, but the time for training
balanced, data augmentation techniques have to be applied the net and the number of parameters increase significantly.
(Krizhevsky et al. 2012). A window size tw was used for the convolution process
To balance the dataset, we propose a novel data aug- and set to 42 observations or 250 days in average as done in
mentation technique based on light curve replicates. As men- Mackenzie et al. 2016; Valenzuela & Pichara 2017a. Finally, a
tion before in Section 4, the number of stars per class and stride value sw was used and set to 2 or 12 days in average as
survey is given by NM ax . If the number of light curves per done in Mackenzie et al. 2016; Valenzuela & Pichara 2017a.
class and survey is larger than this parameter, the replica-
tion process does not take place. Otherwise, the light curves
are replicated until they reach that limit. Each class is repli- 7.3 Activation functions
cated using two light curve parameters: burning and step.
In convolutional layers we used relu activation function as
The burning parameter indicates how many points we have
they are capable of extracting the important information .
to discard in the light curve. The step parameter tells ev-
ery how many points we should take samples. The burning relu(x) = max(0, x)) (5)
MNRAS 000, 1–16 (2017)
10 Carlos Aguirre et al.
Table 4. Parameters used for the proposed architecture
Parameter name Abbreviation Value
Global Parameters
Stars per survey and class NM a x 8000
Number of Points
Per Light Curve N 500
Batch Size - 256
Architecture
Filters for first convolution S1 64
Filters for second convolution S2 32
Window size tw 42
Stride Value sw 2
Perceptrons in the hidden layer nc ell s 128
Dropout - 0.5
Figure 10. Accuracy of the training model using a 10-fold strat-
Data Augmentation Parameters ified cross validation with subclasses.
Burning burning [1,5]
Step step [0,2] 8 RESULTS
Our experiments are mainly intended to evaluate the classifi-
cation accuracy of the datasets described in Section 5 as well
as the time taken for training the model. We test our model
using classes and subclasses and compare it with a Random
Forest classifier (RF) (Breiman 2001), still the most used
model for light curve classification (Richards et al. 2011;
Dubath et al. 2011; Long et al. 2012; Gieseke et al. 2017).
In classification accuracy, our model achieves better results
in ECL classes and subclasses and comparable results in
LPV and RR Lyrae. RF produces better results in OGLE-
III dataset.
Fifty-nine features were extracted for each of the sur-
veys using FATS library, computed over 500 observations
per light curve. For more information about the features ex-
tracted please refer to Nun et al. 2015. We use the extracted
features to train the RF.
For all of the experiments, we perform a 10-fold strati-
fied cross-validation. The stratification is done by class and
survey to keep the same proportions of classes per survey in
Figure 9. Accuracy of the training model using a 10-fold strati-
the training and testing sets. We perform data augmenta-
fied cross validation with classes.
tion on each of the steps of the cross-validation within the
training set. Data augmentation technique is important for
improving results in both models. Finally, a 20% validation
set is used in our model to control the number of epochs
For hidden layers, except for convolutional, we used tanh during the training process.
functions because of better results, there widely used and
better gradients they provide (LeCun et al. 1998).
8.1 Computational Run Time
As mentioned before, the LSST will start working in 2022
generating approximately 15TB per night. The vast amount
of data arriving in the future will demand scalable algo-
7.4 Dropout
rithms. We measure the execution time for each of the
Dropout is a regularization technique which randomly drops classification algorithms, considering the feature extraction
units in the training phase (Srivastava et al. 2014). Srivas- (needed just for the RF) and the training iterations. In Table
tava et al. 2014 prove the importance of dropout in neural 5 we can see that because of the feature-extraction required
networks to prevent overfitting. We used a dropout of 0.5 in RF, the RF model takes way more time in overall. RF is
as suggested in the mentioned work in the two fully con- faster than CNN in the training phase because CNN needs
nected parts of our architecture. One between the flattening several epochs, in this case, 500 epochs, where each one takes
layer and hidden layer, the other between the hidden layer between 6 and 11 seconds to run for classes and subclasses
and the output layer. Dropout increases the generalization respectively. The extraction of features is parallelized using
of the network, therefore the performance. CPUs, and the model training is parallelized using GPUs.
MNRAS 000, 1–16 (2017)
Paper 11
Table 5. Approximately time of extraction of features and train- 8.2 Results with general classes of variability.
ing the algorithms.
We test our model using four general classes: (i) Cepheids
(CEP), (ii) Long Period Variables (LPV), (iii) RR Lyrae
Method Extraction Training Total
(RRlyr) and (iv) Eclipsing Binaries (ECL). The distribu-
of Features Algorithm Run Time
tion of classes and subclasses per survey are shown in Ta-
RF 11.5 days 36 min 11.52 days bles 1, 2 and 3. Figure 11 and 12 show the results of using
Classes CNN 30 min 50 min 1.33 hrs our convolutional architecture and RF respectively. Table 6
Subclasses CNN 30 min 91.8 min 2.03 hrs summarize the accuracy per class of both approaches.
As it can be seen, RF achieves 96% of accuracy in
Table 6. Accuracy per class and subclass for each survey. OGLE-III dataset as it has more labeled data than the oth-
ers surveys. In VVV RF obtains 97% of accuracy in some of
Class CNN RF the classes that have more labeled data (LPV ), but not in
ECL-OGLE 0.98 ± 0.01 0.97 ± 0.01 stars with few labeled examples (ECL and CEP ). In Corot,
ECL-VVV 0.92 ± 0.02 0.89 ± 0.03 RF achieves 91% of accuracy only in ECL stars, mainly be-
ECL-Corot 0.00 ± 0.00 0.91 ± 0.04 cause of the high cadence of Corot that make it infeasible
LPV-OGLE 0.99 ± 0.00 0.97 ± 0.01 to extract features correctly, especially those related to pe-
LPV-VVV 0.94 ± 0.01 0.97 ± 0.01 riodicity. RF results show that FATS features of some light
LPV-Corot 0.92 ± 0.11 0.00 ± 0.00 curves (LPV and RRlyr ) can classify accurately between dif-
RRLyr-OGLE 0.94 ± 0.01 0.97 ± 0.00 ferent surveys. That is not a surprise mainly because period
RRLyr-VVV 0.94 ± 0.01 0.86 ± 0.02 features are less sensitive to changes in cadence.
RRLyr-Corot 0.00 ± 0.00 0.58 ± 0.07
Our proposed architecture achieves comparable classi-
CEP-OGLE 0.90 ± 0.03 0.93 ± 0.01
fication accuracy in OGLE-III but with much less training
CEP-VVV 0.00 ± 0.00 0.08 ± 0.17
CEP-Corot 0.90 ± 0.08 0.46 ± 0.12 time. As shown in Figure 9 our model produces approxi-
mately an accuracy of 97% in the validation set. Each of the
Subclass CNN RF colors represents one training of the 10-fold stratified cross-
EC-OGLE 0.93 ± 0.01 0.91 ± 0.01 validation. As shown in Table 6, OGLE-III dataset achieves
EC-VVV 0.69 ± 0.04 0.71 ± 0.03 95% of accuracy in average in all of its classes. VVV survey
nonEC-OGLE 0.98 ± 0.01 0.94 ± 0.01 achieves 93.7% of accuracy in most of its classes, except for
nonEC-VVV 0.51 ± 0.04 0.37 ± 0.05 CEP stars, which are less than 40 light curves. Comparing it
Mira-OGLE 0.98 ± 0.01 0.98 ± 0.00 to RF performance, it achieves better performance in VVV
Mira-VVV 0.94 ± 0.01 0.29 ± 0.02 as it has 92% of accuracy on each of the classes, except for
SRV-OGLE 0.92 ± 0.02 0.93 ± 0.01 CEP. In Corot, CNN and RF achieve comparable results.
SRV-VVV 0.00 ± 0.00 0.67 ± 0.02
Osarg-OGLE 0.90 ± 0.01 0.88 ± 0.01
Osarg-VVV 0.00 ± 0.00 0.72 ± 0.01
RRab-OGLE 0.72 ± 0.03 0.96 ± 0.01 8.3 Results with subclasses of variability
RRab-VVV 0.77 ± 0.02 0.83 ± 0.01 We test our model using nine types of subclasses:
RRab-Corot 0.11 ± 0.15 0.48 ± 0.29
(i) First-Overtone 10 Classical Cepheid (Cep10), (ii) Funda-
RRc-OGLE 0.86 ± 0.02 0.98 ± 0.00
mental-Mode F Classical Cepheid (CepF), (iii) RR Lyrae ab
RRc-VVV 0.75 ± 0.03 0.83 ± 0.02
RRc-Corot 0.01 ± 0.01 0.99 ± 0.01 (RRab), (iv) RR Lyrae c (RRc), (v) Mira, (vi) Semi-Regu-
CEP10-OGLE 0.84 ± 0.03 0.92 ± 0.02 lar Variables (SRV), (vii) Small Amplitude Red Giants (OS-
CEP10-VVV 0.00 ± 0.00 0.00 ± 0.00 ARGs), (viii) Eclipsing Binaries (EC) and (ix) Eclipsing
CEPF-OGLE 0.72 ± 0.02 0.90 ± 0.01 Binaries Semi-Detached (nonEC). The distribution of sub-
CEPF-VVV 0.00 ± 0.00 0.00 ± 0.00 classes per survey are shown in Tables 1, 2 and 3. Figure 13
and 14 show the results of using our neural network archi-
tecture and Random Forest respectively. Table 6 summarize
the accuracy per subclass of both approaches.
As shown in Figure 14, RF achieves better accuracy in
RR Lyrae and Cepheid stars, despite the small number of
Note that a significant improvement in the feature extraction light curves and mainly because of the data augmentation
process could be made if FATS library supported GPUs. technique. As shown in Table 6, OGLE-III dataset achieves
Our proposed architecture and RF are trained using a more than 90% of accuracy in most of the subclasses, as it
computer with 128 GB RAM, a GeForce GTX 1080 Ti GPU has more labeled data than the others surveys. However, in
and 6 CPU. Our algorithm is developed using Keras (Chollet VVV survey, a 80% of accuracy is obtained in RRab and
et al. 2015) framework that runs on top of Tensorflow (Abadi RRc stars. Finally, Corot’s catalog achieves 99% of accuracy
et al. 2015) library. We use the scikit-learn (Pedregosa et al. in RRc stars.
2011) implementation for RF with defaults settings except As shown in Figure 10, our model produces approxi-
for the minimum samples leaf that was set to a 100 for better mately an accuracy of 85% in the validation set. In OGLE-III
accuracy. dataset, nonEC and Mira stars achieve a 98% of accuracy,
We can see that our method is significantly faster as it and 92% in EC, SRV, and Osarg stars. In VVV survey, our
works with raw magnitudes and time and requires only a model achieves 76% of accuracy in RRab and RRc stars, and
couple of minutes of pre-processing. 94% in Mira stars. However, Osarg and SRV are confused
MNRAS 000, 1–16 (2017)
12 Carlos Aguirre et al.
Figure 11. Confusion matrix per class and survey for the convolutional neural network. Empty cells correspond to 0%.
in a 81% and 93% with Mira type respectively, which indi- ically discovering patterns across light curves even with odd
cates a clear overfitting of LPV stars. None of the models cadences and bands. We show that multi-survey classifica-
can correctly classify VVV Cepheids, mainly because of the tion is possible with just one architecture and we believe it
low number of light curves (28 light curves in total). With deserves further attention soon. The proposed model is com-
EC classes from VVV we achieve better results than RF. parable to RF in classification accuracy but much better in
Finally, the accuracy achieved in Corot is the lowest, mainly scalability. Also, our approach can correctly classify most of
because of the few amounts of light curves used (28 RRab the classes and subclasses of variability.
and 481 RRc stars). Like most of deep learning approaches, our model is
capable of learning its light curve representation, allowing
astronomers to use the raw time series as inputs.
9 CONCLUSIONS
In order to have an extra comparison point, we attempt
In this work, we have presented a CNN architecture to clas- to compare our method with the approach presented in Ma-
sify variable stars, tested on light curves integrated from habal et al. (2017). We implemented their algorithm; we
various surveys. The proposed model can learn from the se- run it with the same catalogs we use for our method, tak-
quence of differences between magnitude and time, automat- ing 500 observations per light curve. Mahabal’s method did
MNRAS 000, 1–16 (2017)
Paper 13
Figure 12. Confusion matrix per class and survey using Random Forest algorithm. Empty cells correspond to 0%.
not generate results, because it takes about 5 hrs to process that their method is worse than ours, it is just intended for
just one light curve. The extra computational cost mainly another problem setup. We believe that it is not a fear com-
comes because their algorithm generates the 2D embeddings parison to add these results to our paper, because Mahabal’s
by comparing every pair of points in each light curve, some- method would be using much less information compared to
thing that makes it impractical for our experimental setup. ours.
To obtain results with Mahabal’s approach, we decrease the
number of observations per light curve until their method As future work, oversampling techniques should be
return results in a comparable amount of time. With about studied, given that we observe that our model is sen-
100 observations, their method takes about 5 minutes to sitive to unbalanced training sets. Also, more complex
run, still too slow for our setup (about 140000 light curves, architectures must be developed to improve classification
8000 light curves per class, etc.) By using 50 observations, accuracy. New approaches able to deal with few light
their method could generate results. As we expected, their curves in some classes are needed. For example, simulation
classification results are much worse, given that the small models based on astrophysics would be a significant con-
number of observations make impossible even capture the tribution especially for the most unrepresented subclasses
light curve periods in most of the cases. We are not telling of variability. With simulation models, deep learning
architectures could be significantly improved, given that
MNRAS 000, 1–16 (2017)
14 Carlos Aguirre et al.
Figure 13. Confusion matrix per class and survey for the convolutional neural network. Empty cells correspond to 0.
usually their performance is directly related to the number ACKNOWLEDGEMENTS
of training cases, even with simulated instances. In the
same direction, it would be interesting to produce larger
training sets by integrating a higher number of surveys.
Our code implementation is done in Python, available
for download at https://github.com/<authorusername>
/DeepMultiSurveyClassificationOfVariableStars. We
also published the catalogs with the cross-matched training We acknowledge the support from CONICYT-Chile,
sets used in this work. through the FONDECYT Regular project number 1180054.
This paper utilizes public information of the OGLE, Vista
and Corot surveys. The computations were made using the
cluster from Pontificia Universidad Católica de Chile.
MNRAS 000, 1–16 (2017)
Paper 15
Figure 14. Confusion matrix per class and survey using Random Forest algorithm. Empty cells correspond to 0.
REFERENCES Bloom J., Richards J., 2011, Advances in Machine Learning and
Data Mining for Astronomy
Abadi M., et al., 2015, TensorFlow: Large-Scale Machine Learning
Bordé P., Rouan D., Léger A., 2003, Astronomy & Astrophysics,
on Heterogeneous Systems, https://www.tensorflow.org/
405, 1137
Abell P. A., et al., 2009, arXiv preprint arXiv:0912.0201
Borne K. D., Strauss M., Tyson J., 2007, BULLETIN-
Baglin A., et al., 2002, in Stellar structure and habitable planet
AMERICAN ASTRONOMICAL SOCIETY, 39, 137
finding. pp 17–24
Basheer I., Hajmeer M., 2000, Journal of microbiological methods, Breiman L., 2001, Machine learning, 45, 5
43, 3 Cabrera-Vives G., Reyes I., Förster F., Estévez P. A., Maureira
Belokurov V., Evans N. W., Du Y. L., 2003, Monthly Notices of J.-C., 2017, The Astrophysical Journal, 836, 97
the Royal Astronomical Society, 341, 1373 Chollet F., et al., 2015, Keras, https://github.com/fchollet/
Benavente P., Protopapas P., Pichara K., 2017, The Astrophysical keras
Journal, 845, 18pp Cybenko G., 1989, Mathematics of Control, Signals, and Systems
MNRAS 000, 1–16 (2017)
16 Carlos Aguirre et al.
(MCSS), 2, 303 Salakhutdinov R., 2014, Journal of machine learning research,
De Boer P.-T., Kroese D. P., Mannor S., Rubinstein R. Y., 2005, 15, 1929
Annals of operations research, 134, 19 Sutskever I., Vinyals O., Le Q. V., 2014, in Advances in neural
Debosscher J., Sarro L., Aerts C., Cuypers J., Vandenbussche B., information processing systems. pp 3104–3112
Garrido R., Solano E., 2007, Astronomy & Astrophysics, 475, Szegedy C., et al., 2015, in Proceedings of the IEEE conference
1159 on computer vision and pattern recognition. pp 1–9
Dieleman S., Willett K. W., Dambre J., 2015, Monthly notices of Udalski A., 2004, arXiv preprint astro-ph/0401123
the royal astronomical society, 450, 1441 Valenzuela L., Pichara K., 2017a, Monthly Notices of the Royal
Dubath P., et al., 2011, Monthly Notices of the Royal Astronom- Astronomical Society
ical Society, 414, 2602 Valenzuela L., Pichara K., 2017b, Monthly Notices of the Royal
Gieseke F., et al., 2017, Monthly Notices of the Royal Astronom- Astronomical Society
ical Society, p. stx2161 Werbos P. J., 1990, Proceedings of the IEEE, 78, 1550
Graves A., Mohamed A.-r., Hinton G., 2013, in Acoustics, speech Xiong W., Droppo J., Huang X., Seide F., Seltzer M., Stolcke A.,
and signal processing (icassp), 2013 ieee international confer- Yu D., Zweig G., 2016, arXiv preprint arXiv:1610.05256
ence on. pp 6645–6649 Xiong W., Droppo J., Huang X., Seide F., Seltzer M., Stolcke
Hensman P., Masko D., 2015, Degree Project in Computer Sci- A., Yu D., Zweig G., 2017, in Acoustics, Speech and Signal
ence, KTH Royal Institute of Technology Processing (ICASSP), 2017 IEEE International Conference
Hornik K., 1991, Neural networks, 4, 251 on. pp 5255–5259
Huijse P., Estevez P. A., Protopapas P., Principe J. C., Zegers P., Zeiler M. D., Fergus R., 2014, in European conference on com-
2014, IEEE Computational Intelligence Magazine, 9, 27 puter vision. pp 818–833
Jean S., Cho K., Memisevic R., Bengio Y., 2014, arXiv preprint Zheng Y., Liu Q., Chen E., Ge Y., Zhao J. L., 2014, in Interna-
arXiv:1412.2007 tional Conference on Web-Age Information Management. pp
Jiang Z., Liang J., 2016, arXiv preprint arXiv:1612.01277 298–310
Kim D.-W., Bailer-Jones C. A., 2016, Astronomy & Astrophysics,
587, A18 This paper has been typeset from a TEX/LATEX file prepared by
Kim D.-W., Protopapas P., Bailer-Jones C. A., Byun Y.-I., Chang the author.
S.-W., Marquette J.-B., Shin M.-S., 2014, Astronomy & As-
trophysics, 566, A43
Kingma D., Ba J., 2014, arXiv preprint arXiv:1412.6980
Krizhevsky A., Sutskever I., Hinton G. E., 2012, in Advances in
neural information processing systems. pp 1097–1105
LeCun Y., Bottou L., Orr G. B., Müller K.-R., 1998, in , Neural
networks: Tricks of the trade. Springer, pp 9–50
LeCun Y., Bengio Y., Hinton G., 2015, Nature, 521, 436
Long J. P., El Karoui N., Rice J. A., Richards J. W., Bloom J. S.,
2012, Publications of the Astronomical Society of the Pacific,
124, 280
Machin J. I., Pichara K., Protopapas P., Neyem A., Pieringer C.,
2018, Monthly Notices of the Royal Astronomical Society
Mackenzie C., Pichara K., Protopapas P., 2016, The Astrophysi-
cal Journal, 820, 138
Mahabal A., Sheth K., Gieseke F., Pai A., Djorgovski S. G., Drake
A., Graham M., et al., 2017, arXiv preprint arXiv:1709.06257
Minniti D., et al., 2010, New Astronomy, 15, 433
Naul B., Pérez F., Bloom J. S., van der Walt S., 2017, Nature
Astronomy, p. 1
Nun I., Pichara K., Protopapas P., Kim D.-W., 2014, The Astro-
physical Journal, 793, 23
Nun I., Protopapas P., Sim B., Zhu M., Dave R., Castro N.,
Pichara K., 2015, arXiv preprint arXiv:1506.00010
Pedregosa F., et al., 2011, Journal of Machine Learning Research,
12, 2825
Pichara K., Protopapas P., 2013, The Astrophysical Journal, 777,
83
Pichara K., Protopapas P., Kim D.-W., Marquette J.-B., Tis-
serand P., 2012, Monthly Notices of the Royal Astronomical
Society, 427, 1284
Pichara K., Protopapas P., Leon D., 2016a, The Astrophysical
Journal, 819
Pichara K., Protopapas P., León D., 2016b, The Astrophysical
Journal, 819, 18
Ren S., He K., Girshick R., Sun J., 2015, in Advances in neural
information processing systems. pp 91–99
Richards J. W., et al., 2011, The Astrophysical Journal, 733, 10
Ruder S., 2016, arXiv preprint arXiv:1609.04747
Sarro L., Debosscher J., López M., Aerts C., 2009, Astronomy &
Astrophysics, 494, 739
Srivastava N., Hinton G. E., Krizhevsky A., Sutskever I.,
MNRAS 000, 1–16 (2017)
Anda mungkin juga menyukai
- Lab Manual SCOA 20 21Dokumen37 halamanLab Manual SCOA 20 21Anuj Padmawar0% (1)
- EJRSDokumen11 halamanEJRSYa SaranBelum ada peringkat
- Towards Reconstructing The Halo Clustering and Hal PDFDokumen16 halamanTowards Reconstructing The Halo Clustering and Hal PDFOleksii SokoliukBelum ada peringkat
- Lenstronomy: Multi-Purpose Gravitational Lens Modelling Software PackageDokumen39 halamanLenstronomy: Multi-Purpose Gravitational Lens Modelling Software Packagealexbrane morenoBelum ada peringkat
- Astroebsd: Exploring New Space in Pattern Indexing With Methods Launched From An Astronomical ApproachDokumen10 halamanAstroebsd: Exploring New Space in Pattern Indexing With Methods Launched From An Astronomical ApproachLívia RodriguesBelum ada peringkat
- Can Semantic Labeling Methods Generalize To Any City? The Inria Aerial Image Labeling BenchmarkDokumen5 halamanCan Semantic Labeling Methods Generalize To Any City? The Inria Aerial Image Labeling BenchmarkGene Jh CheeBelum ada peringkat
- A Novel Feature Descriptor For Automatic Change Detection in Remote Sensing ImagesDokumen10 halamanA Novel Feature Descriptor For Automatic Change Detection in Remote Sensing ImagesSathya BamaBelum ada peringkat
- Wang - Robust Multi-Feature Learning For Skeleton-Based Action RecognitionDokumen13 halamanWang - Robust Multi-Feature Learning For Skeleton-Based Action Recognitionmasoud kiaBelum ada peringkat
- Systematic Literature Review and Mapping of The Prediction of Pile CapacitiesDokumen12 halamanSystematic Literature Review and Mapping of The Prediction of Pile CapacitiesCaio Augusto Lemke CostaBelum ada peringkat
- On The Application of Dimensionality Reduction and Clustering Algorithms For The Classification of Kinematic Morphologies of GalaxiesDokumen20 halamanOn The Application of Dimensionality Reduction and Clustering Algorithms For The Classification of Kinematic Morphologies of GalaxiesHarukiBelum ada peringkat
- Galaxies 10 00008Dokumen9 halamanGalaxies 10 00008Korhan KaraBelum ada peringkat
- Astrophysics 1.5Dokumen23 halamanAstrophysics 1.5ericv911Belum ada peringkat
- 1 s2.0 S266591742200071X MainDokumen9 halaman1 s2.0 S266591742200071X MainRamalakshmi KBelum ada peringkat
- Deep Learning Deep Learning HyperspectralDokumen18 halamanDeep Learning Deep Learning Hyperspectralcarlosgg33Belum ada peringkat
- PhysBased Interact Flow Vis Based On Schlieren and Interf Exp TechniquesDokumen13 halamanPhysBased Interact Flow Vis Based On Schlieren and Interf Exp TechniquesRoxi InaBelum ada peringkat
- Zhang 2018Dokumen12 halamanZhang 2018Reza NugrahaBelum ada peringkat
- Unsupervised Deep Feature Extraction For Remote Sensing Image ClassificationDokumen14 halamanUnsupervised Deep Feature Extraction For Remote Sensing Image Classification于富昇Belum ada peringkat
- Darts: D A S: Ifferentiable Rchitecture EarchDokumen13 halamanDarts: D A S: Ifferentiable Rchitecture EarchFgjdhskfBelum ada peringkat
- (Re) Satellite Image Time Series Classification With Pixel-Set Encoders and Temporal Self-AttentionDokumen11 halaman(Re) Satellite Image Time Series Classification With Pixel-Set Encoders and Temporal Self-AttentionFernando BorgesBelum ada peringkat
- Deep Symbolic Regression For Physics Guided by Units Constraints PDFDokumen16 halamanDeep Symbolic Regression For Physics Guided by Units Constraints PDFJair Carmona CasianoBelum ada peringkat
- Deeper, Sharper, Faster - Application of Efficient Transformer To Galaxy Image RestorationDokumen17 halamanDeeper, Sharper, Faster - Application of Efficient Transformer To Galaxy Image RestorationbbcourtBelum ada peringkat
- Destin: A Scalable Deep Learning Architecture With Application To High-Dimensional Robust Pattern RecognitionDokumen5 halamanDestin: A Scalable Deep Learning Architecture With Application To High-Dimensional Robust Pattern RecognitionRobert CoopBelum ada peringkat
- Wavelet TessellationDokumen11 halamanWavelet Tessellationjuan carlos romero ramirezBelum ada peringkat
- Big Data Research: António Cruz, Joel P. Arrais, Penousal MachadoDokumen10 halamanBig Data Research: António Cruz, Joel P. Arrais, Penousal MachadoJoel ArraisBelum ada peringkat
- JCTN Avinash Rohini 417 425Dokumen10 halamanJCTN Avinash Rohini 417 425demihuman086Belum ada peringkat
- A Survey of Modern Deep Learning Based Object Detection ModelsDokumen19 halamanA Survey of Modern Deep Learning Based Object Detection Modelsfnetflix746Belum ada peringkat
- 1 s2.0 S0950705121008248 MainDokumen14 halaman1 s2.0 S0950705121008248 MainJorge D. MarquesBelum ada peringkat
- Visualizing Astronomical Data With BlenderDokumen39 halamanVisualizing Astronomical Data With BlendergabrielchiritoiBelum ada peringkat
- Stellar Classification by Machine LearningDokumen6 halamanStellar Classification by Machine LearningDRScienceBelum ada peringkat
- Metrics For Deep Generative ModelsDokumen11 halamanMetrics For Deep Generative ModelssparkshockBelum ada peringkat
- 1810 08468Dokumen4 halaman1810 08468Negar TavasoliBelum ada peringkat
- Dalya Baron: Draft Version April 17, 2019 Typeset Using L Tex Preprint2 Style in Aastex61Dokumen37 halamanDalya Baron: Draft Version April 17, 2019 Typeset Using L Tex Preprint2 Style in Aastex61Aga MathaBelum ada peringkat
- A Comparison of Deep Learning Architectures For Spacecraft Anomaly DetectionDokumen11 halamanA Comparison of Deep Learning Architectures For Spacecraft Anomaly DetectionlarrylynnmailBelum ada peringkat
- CNN 2Dokumen14 halamanCNN 2Fatih officialBelum ada peringkat
- 2020 Relational NetworkDokumen15 halaman2020 Relational NetworksabrineBelum ada peringkat
- CCD Imager Development For AstronomyDokumen21 halamanCCD Imager Development For Astronomysd6433Belum ada peringkat
- Reci Pro Seto Ohtsuka 2022Dokumen15 halamanReci Pro Seto Ohtsuka 2022Josué MurilloBelum ada peringkat
- Active Learning For Hyperspectral Image Classification A Comparative ReviewDokumen23 halamanActive Learning For Hyperspectral Image Classification A Comparative ReviewAdduru U G SankararaoBelum ada peringkat
- Michelle Lochner, Jason D. Mcewen, Hiranya V. Peiris, Ofer Lahav, Max K. WinterDokumen15 halamanMichelle Lochner, Jason D. Mcewen, Hiranya V. Peiris, Ofer Lahav, Max K. WinterPedro OtavioBelum ada peringkat
- Identification of Orientation of Galaxies in The Galaxy Zoo Dataset Using Spectral ClusteringDokumen5 halamanIdentification of Orientation of Galaxies in The Galaxy Zoo Dataset Using Spectral ClusteringVijay ShankarBelum ada peringkat
- Unsupervised Feature Evaluation: A Neuro-Fuzzy ApproachDokumen11 halamanUnsupervised Feature Evaluation: A Neuro-Fuzzy ApproachSubhrajit NagBelum ada peringkat
- Toward Modular in Situ Visualization in Earth System Models: The Regional Modeling System RegESM and ApplicationsDokumen41 halamanToward Modular in Situ Visualization in Earth System Models: The Regional Modeling System RegESM and Applicationsbartimuf7097Belum ada peringkat
- DNN NMRDokumen12 halamanDNN NMRRavan FarmanovBelum ada peringkat
- Paper AiDokumen15 halamanPaper AiTheppitak TheppitakBelum ada peringkat
- Satellite Image Classification With Deep Learning SurveyDokumen5 halamanSatellite Image Classification With Deep Learning SurveyEditor IJTSRDBelum ada peringkat
- 1810 08462Dokumen5 halaman1810 08462Negar TavasoliBelum ada peringkat
- Object Detection With Deep Learning: A ReviewDokumen21 halamanObject Detection With Deep Learning: A ReviewDhananjay SinghBelum ada peringkat
- JournalNX-River Extraction TechniquesDokumen3 halamanJournalNX-River Extraction TechniquesJournalNX - a Multidisciplinary Peer Reviewed JournalBelum ada peringkat
- DARTS: Differentiable Architecture SearchDokumen12 halamanDARTS: Differentiable Architecture SearchyyscribdBelum ada peringkat
- Information Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin WangDokumen20 halamanInformation Sciences: Hao Li, Maoguo Gong, Qiguang Miao, Bin Wangazazel17Belum ada peringkat
- Ijcset 2016060701Dokumen3 halamanIjcset 2016060701EdwardBelum ada peringkat
- A Comparative Study of Data Mining ApproDokumen14 halamanA Comparative Study of Data Mining ApproLuis Gerver RamosBelum ada peringkat
- Paper 82-Hyperspectral Image ClassificationDokumen7 halamanPaper 82-Hyperspectral Image ClassificationDharmi JaviyaBelum ada peringkat
- Extracting Interpretable Features For Time Series An - 2023 - Expert Systems WitDokumen11 halamanExtracting Interpretable Features For Time Series An - 2023 - Expert Systems WitDilip SinghBelum ada peringkat
- Brescia 2015 Automated Physical Classification in SDSS DR10Dokumen13 halamanBrescia 2015 Automated Physical Classification in SDSS DR10smswamyBelum ada peringkat
- Categorical Deep Learning - An Algebraic Theory of ArchitecturesDokumen29 halamanCategorical Deep Learning - An Algebraic Theory of Architecturestimsmith1081574Belum ada peringkat
- 11 (2020) Yuan Li - Visual Object Tracking With Adaptive Structural Convolutional NetworkDokumen11 halaman11 (2020) Yuan Li - Visual Object Tracking With Adaptive Structural Convolutional Networkmat felBelum ada peringkat
- Zhong Et Al. - 2017 - Learning To Diversify Deep Belief Networks For Hyperspectral Image ClassificationDokumen15 halamanZhong Et Al. - 2017 - Learning To Diversify Deep Belief Networks For Hyperspectral Image ClassificationEwerton DuarteBelum ada peringkat
- Time Series Classification From Scratch With Deep Neural NetworksDokumen9 halamanTime Series Classification From Scratch With Deep Neural NetworksSasha NarvaezBelum ada peringkat
- Graph Deep Learning For Time Series Forecasting: Andrea Cini, Ivan Marisca, Daniele Zambon, and Cesare AlippiDokumen42 halamanGraph Deep Learning For Time Series Forecasting: Andrea Cini, Ivan Marisca, Daniele Zambon, and Cesare Alippiouyang2013scBelum ada peringkat
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonDari EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonBelum ada peringkat
- Sign-Changing Blowing-Up Solutions For The Critical Nonlinear Heat EquationDokumen60 halamanSign-Changing Blowing-Up Solutions For The Critical Nonlinear Heat EquationFábio DuarteBelum ada peringkat
- On Subfields of The Second Generalization of The GK Maximal Function FieldDokumen21 halamanOn Subfields of The Second Generalization of The GK Maximal Function FieldFábio DuarteBelum ada peringkat
- Duality and Normalization, Variations On A Theme of Serre and ReidDokumen26 halamanDuality and Normalization, Variations On A Theme of Serre and ReidFábio DuarteBelum ada peringkat
- Using Convolutional Neural Networks To Predict Galaxy Metallicity From Three-Color ImagesDokumen12 halamanUsing Convolutional Neural Networks To Predict Galaxy Metallicity From Three-Color ImagesFábio DuarteBelum ada peringkat
- Riemann Problems and Dispersive Shocks in Self-Focusing MediaDokumen7 halamanRiemann Problems and Dispersive Shocks in Self-Focusing MediaFábio DuarteBelum ada peringkat
- On The Gaps of The Spectrum of Volumes of TradesDokumen9 halamanOn The Gaps of The Spectrum of Volumes of TradesFábio DuarteBelum ada peringkat
- Dark Matter Searches at CollidersDokumen33 halamanDark Matter Searches at CollidersFábio DuarteBelum ada peringkat
- Fragile Superconductivity in The Presence of Weakly Disordered Charge Density WavesDokumen13 halamanFragile Superconductivity in The Presence of Weakly Disordered Charge Density WavesFábio DuarteBelum ada peringkat
- Observability of Molecular Species in A Nitrogen Dominated Atmosphere For 55 Cancri eDokumen9 halamanObservability of Molecular Species in A Nitrogen Dominated Atmosphere For 55 Cancri eFábio DuarteBelum ada peringkat
- Bayesian Multi-Messenger Search Method For Common Sources of Gravitational Waves and High-Energy NeutrinosDokumen11 halamanBayesian Multi-Messenger Search Method For Common Sources of Gravitational Waves and High-Energy NeutrinosFábio DuarteBelum ada peringkat
- Numerical Models For The Diffuse Ionized Gas in GalaxiesDokumen21 halamanNumerical Models For The Diffuse Ionized Gas in GalaxiesFábio DuarteBelum ada peringkat
- Periodic Co/Nb Pseudo Spin-Valve For Cryogenic MemoryDokumen5 halamanPeriodic Co/Nb Pseudo Spin-Valve For Cryogenic MemoryFábio DuarteBelum ada peringkat
- Photoevaporation of Molecular Clouds in Regions of Massive Star Formation as Revealed Through H2 and Brγ EmissionDokumen19 halamanPhotoevaporation of Molecular Clouds in Regions of Massive Star Formation as Revealed Through H2 and Brγ EmissionFábio DuarteBelum ada peringkat
- Origins of Molecular Clouds in Early-Type GalaxiesDokumen14 halamanOrigins of Molecular Clouds in Early-Type GalaxiesFábio DuarteBelum ada peringkat
- Fragile Superconductivity in The Presence of Weakly Disordered Charge Density WavesDokumen13 halamanFragile Superconductivity in The Presence of Weakly Disordered Charge Density WavesFábio DuarteBelum ada peringkat
- Wide-Field Optical Spectroscopy of Abell 133: A Search For Filaments Reported in X-Ray ObservationsDokumen25 halamanWide-Field Optical Spectroscopy of Abell 133: A Search For Filaments Reported in X-Ray ObservationsFábio DuarteBelum ada peringkat
- The Goldilocks Problem of The Quasar Contribution To ReionizationDokumen14 halamanThe Goldilocks Problem of The Quasar Contribution To ReionizationAnderson VargasBelum ada peringkat
- The Large Early Galaxy Astrophysics Census (LEGA-C) Data Release II: Dynamical and Stellar Population Properties of Z 1 Galaxies in The COSMOS FieldDokumen18 halamanThe Large Early Galaxy Astrophysics Census (LEGA-C) Data Release II: Dynamical and Stellar Population Properties of Z 1 Galaxies in The COSMOS FieldFábio DuarteBelum ada peringkat
- X-UDS: The Chandra Legacy Survey of The UKIDSS Ultra Deep Survey FieldDokumen15 halamanX-UDS: The Chandra Legacy Survey of The UKIDSS Ultra Deep Survey FieldFábio DuarteBelum ada peringkat
- The MUSCLES Treasury Survey. V. FUV Flares On Active and Inactive M DwarfsDokumen43 halamanThe MUSCLES Treasury Survey. V. FUV Flares On Active and Inactive M DwarfsFábio DuarteBelum ada peringkat
- The LISA Interferometer: Impact of Stray Light On The Phase of The Heterodyne SignalDokumen8 halamanThe LISA Interferometer: Impact of Stray Light On The Phase of The Heterodyne SignalFábio DuarteBelum ada peringkat
- The Optical Morphologies of Galaxies in The IllustrisTNG Simulation: A Comparison To Pan-STARRS ObservationsDokumen21 halamanThe Optical Morphologies of Galaxies in The IllustrisTNG Simulation: A Comparison To Pan-STARRS ObservationsFábio DuarteBelum ada peringkat
- Enhanced Black-Hole Mergers in Binary-Binary InteractionsDokumen11 halamanEnhanced Black-Hole Mergers in Binary-Binary InteractionsFábio DuarteBelum ada peringkat
- Unistructurality of Cluster AlgebrasDokumen8 halamanUnistructurality of Cluster AlgebrasFábio DuarteBelum ada peringkat
- Neutron Star Mergers Are The Dominant Source of The R-Process in The Early Evolution of Dwarf GalaxiesDokumen22 halamanNeutron Star Mergers Are The Dominant Source of The R-Process in The Early Evolution of Dwarf GalaxiesFábio DuarteBelum ada peringkat
- Weak Radius of The ProtonDokumen4 halamanWeak Radius of The ProtonFábio DuarteBelum ada peringkat
- Multi-Conjugate Adaptive Optics Simulator For The Thirty Meter Telescope: Design, Implementation, and ResultsDokumen15 halamanMulti-Conjugate Adaptive Optics Simulator For The Thirty Meter Telescope: Design, Implementation, and ResultsFábio DuarteBelum ada peringkat
- Opacity, Variability and Kinematics of AGN JetsDokumen11 halamanOpacity, Variability and Kinematics of AGN JetsFábio DuarteBelum ada peringkat
- Absence of Unidirectionally Propagating Surface Plasmon-Polaritons in Nonreciprocal PlasmonicsDokumen6 halamanAbsence of Unidirectionally Propagating Surface Plasmon-Polaritons in Nonreciprocal PlasmonicsFábio DuarteBelum ada peringkat
- 30 Frequently Asked Deep Learning Interview Questions and AnswersDokumen28 halaman30 Frequently Asked Deep Learning Interview Questions and AnswersKhirod Behera100% (1)
- Live 4992 9623 JairDokumen76 halamanLive 4992 9623 JairAntonio MarcegagliaBelum ada peringkat
- Mengenali Fungsi Logika "And" Melalui Pemrograman Perceptron Dengan MatlabDokumen8 halamanMengenali Fungsi Logika "And" Melalui Pemrograman Perceptron Dengan MatlabGeofanggaBelum ada peringkat
- The Weka Multilayer Perceptron Classifier: Daniel I. MORARIU, Radu G. Creţulescu, Macarie BreazuDokumen9 halamanThe Weka Multilayer Perceptron Classifier: Daniel I. MORARIU, Radu G. Creţulescu, Macarie BreazuAliza KhanBelum ada peringkat
- Analisis de Datos MITDokumen340 halamanAnalisis de Datos MITAnonymous lIJl27QBXLBelum ada peringkat
- Exploration and Prediction of Fluid Dynamical Systems UsingDokumen22 halamanExploration and Prediction of Fluid Dynamical Systems UsingAshwani SinghBelum ada peringkat
- Neuromorphic Computing Brief Market AnalysisDokumen57 halamanNeuromorphic Computing Brief Market AnalysisMayuri AnandikarBelum ada peringkat
- WekaDokumen15 halamanWekarashmi23septBelum ada peringkat
- CS 540: Introduction To Artificial Intelligence: Final Exam: 2:45-4:45pm, May 11, 2008 Room 1240 Computer SciencesDokumen11 halamanCS 540: Introduction To Artificial Intelligence: Final Exam: 2:45-4:45pm, May 11, 2008 Room 1240 Computer ScienceschemchemhaBelum ada peringkat
- Intro To NN & FLDokumen42 halamanIntro To NN & FLZerocode CodeBelum ada peringkat
- TensorFlow TutorialDokumen65 halamanTensorFlow TutorialsantobokyBelum ada peringkat
- Unit 1 Introduction To Neural NetworksDokumen9 halamanUnit 1 Introduction To Neural NetworksRegved PandeBelum ada peringkat
- Artificial Neural Network: Vardhaman College of EngineeringDokumen35 halamanArtificial Neural Network: Vardhaman College of EngineeringravvalavamsiBelum ada peringkat
- Deep Learning For Health InformaticsDokumen18 halamanDeep Learning For Health InformaticsSudharson SudharBelum ada peringkat
- MNIST Based Handwritten Digits RecognitionDokumen5 halamanMNIST Based Handwritten Digits RecognitionraznahidBelum ada peringkat
- An Improved Optimization Method in Gas Allocation For Continuous Flow Gas-Lift SystemDokumen12 halamanAn Improved Optimization Method in Gas Allocation For Continuous Flow Gas-Lift SystemAtrian RahadiBelum ada peringkat
- Artificial Neural Networks For Pattern RecognitionDokumen50 halamanArtificial Neural Networks For Pattern RecognitionKhadijaAnamBelum ada peringkat
- Data Mining of Restaurant Review Using W PDFDokumen4 halamanData Mining of Restaurant Review Using W PDFPriyankka PRBelum ada peringkat
- Numerical Solution of Sixth-Order Differential Equations Arising in Astrophysics by Neural NetworkDokumen6 halamanNumerical Solution of Sixth-Order Differential Equations Arising in Astrophysics by Neural NetworkEndless LoveBelum ada peringkat
- Disease Prediction System Using Support Vector Machine and Multilinear RegressionDokumen7 halamanDisease Prediction System Using Support Vector Machine and Multilinear RegressionInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Artificial Neural Networks: An: G.AnuradhaDokumen76 halamanArtificial Neural Networks: An: G.AnuradhashardapatelBelum ada peringkat
- Practical AI For CybersecurityDokumen292 halamanPractical AI For CybersecurityantonioherediaBelum ada peringkat
- AI ZTE RoadmapDokumen26 halamanAI ZTE RoadmapRafi AnsariBelum ada peringkat
- Handwritten Digit Recognition Using Machine and Deep Learning AlgorithmsDokumen6 halamanHandwritten Digit Recognition Using Machine and Deep Learning AlgorithmsRoshanBelum ada peringkat
- كلية بلاد الرافدين الجامعةDokumen67 halamanكلية بلاد الرافدين الجامعةxqq46whzh5Belum ada peringkat
- Neural Networks: 16-385 Computer Vision (Kris Kitani)Dokumen20 halamanNeural Networks: 16-385 Computer Vision (Kris Kitani)juan jose100% (1)
- Matlab Tifac PDFDokumen5 halamanMatlab Tifac PDFAshwala MohanBelum ada peringkat
- A Machine Learning Forecasting Model For COVID-19 Pandemic in IndiaDokumen14 halamanA Machine Learning Forecasting Model For COVID-19 Pandemic in IndiaLuckysingh NegiBelum ada peringkat
- Artificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeDokumen40 halamanArtificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeKiran Moy Mandal100% (1)