Anda mungkin juga menyukai
- Exercices d'intégrales de lignes, de surfaces et de volumesDari EverandExercices d'intégrales de lignes, de surfaces et de volumesBelum ada peringkat
- Exercices d'optique et d'électromagnétismeDari EverandExercices d'optique et d'électromagnétismePenilaian: 5 dari 5 bintang5/5 (1)
- Exercices d'intégrales et d'équations intégro-différentiellesDari EverandExercices d'intégrales et d'équations intégro-différentiellesBelum ada peringkat
- Introduction à la physique nucléaire et des particulesDari EverandIntroduction à la physique nucléaire et des particulesBelum ada peringkat
- Introduction à la physique de la matièreDari EverandIntroduction à la physique de la matièrePenilaian: 3 dari 5 bintang3/5 (1)
- TP Mecanique Du PointDokumen9 halamanTP Mecanique Du PointHamza Boutlih100% (1)
- TD Mecanique Du Solide PC RibiereDokumen26 halamanTD Mecanique Du Solide PC RibiereAnouar MekkaouiBelum ada peringkat
- TD2 2020 2021Dokumen3 halamanTD2 2020 2021nouraBelum ada peringkat
- Examen Normal Mécanique Du Point SMPC 2018 2019correctionDokumen7 halamanExamen Normal Mécanique Du Point SMPC 2018 2019correctionRachif MesrarBelum ada peringkat
- Examens Corr MecDokumen7 halamanExamens Corr MecKhalid ZegBelum ada peringkat
- Dynmq PT Mat - EXO - Enoncés - FRDokumen11 halamanDynmq PT Mat - EXO - Enoncés - FRkaderBelum ada peringkat
- 4 - Problemes Corrigés D'electrotechniquelDokumen10 halaman4 - Problemes Corrigés D'electrotechniquelblbmalekBelum ada peringkat
- Contrôle D'electrostatiqueDokumen2 halamanContrôle D'electrostatiquesinchicovich100% (2)
- Theoreme Moment CinetiqueDokumen7 halamanTheoreme Moment Cinetiquedido_fzBelum ada peringkat
- Td9 - Solide Tunusie ImportantDokumen28 halamanTd9 - Solide Tunusie ImportantDriss Miral Achemlal100% (1)
- Électrostatique Et Magnétostatique Pour Les Classes PréparatoiresDokumen133 halamanÉlectrostatique Et Magnétostatique Pour Les Classes PréparatoiresSi Møhamed HMBelum ada peringkat
- CNC MP Physique2 1996c1Dokumen9 halamanCNC MP Physique2 1996c1Lahcen ElamraouiBelum ada peringkat
- CNC Si MP 2021 CGDokumen8 halamanCNC Si MP 2021 CGayaelhadef123Belum ada peringkat
- TD 1 ElectrostatiqueDokumen4 halamanTD 1 ElectrostatiquenouraBelum ada peringkat
- ResumeDokumen2 halamanResumeMounaim Matini100% (1)
- Auto AdjDokumen9 halamanAuto AdjHamza 01Belum ada peringkat
- TD+Sol SMP-S3-2015-2016 by ExoSup - Com - CopieDokumen49 halamanTD+Sol SMP-S3-2015-2016 by ExoSup - Com - Copieoumaima50% (2)
- Rachid Mesrar Aplli Cine D Solide PDFDokumen10 halamanRachid Mesrar Aplli Cine D Solide PDFAhmed Hamada100% (2)
- Exercices Corriges Mecanique Du PointDokumen124 halamanExercices Corriges Mecanique Du PointarmandgahoungaBelum ada peringkat
- Recc81vision nc2b07Dokumen5 halamanRecc81vision nc2b07dragokalBelum ada peringkat
- 4 TDDokumen6 halaman4 TDAshraf Ouro-adohiBelum ada peringkat
- MECANIQUEDokumen38 halamanMECANIQUESoufianeBelum ada peringkat
- TD 1 MagDokumen2 halamanTD 1 MagAbir BlBelum ada peringkat
- TD Analyse 1Dokumen34 halamanTD Analyse 1MIRA KAWTAR SMPC A6Belum ada peringkat
- Caractéristiques D'inertie Des SolidesDokumen11 halamanCaractéristiques D'inertie Des SolidesAhmed fattoumBelum ada peringkat
- Rattrapage + Corrigé de Physique 1 ST 2008-2009 - Université de Béjaia PDFDokumen4 halamanRattrapage + Corrigé de Physique 1 ST 2008-2009 - Université de Béjaia PDFRai newBelum ada peringkat
- TD de Physique N o 1 - Mécanique Du PointDokumen11 halamanTD de Physique N o 1 - Mécanique Du PointIbrahima Diagne DiengBelum ada peringkat
- CNC MP 2011 Physique 1 CorrigeDokumen12 halamanCNC MP 2011 Physique 1 CorrigeraedBelum ada peringkat
- SLCI - Analyse FréquentielleDokumen10 halamanSLCI - Analyse FréquentielleBah KhalilBelum ada peringkat
- QCMDokumen41 halamanQCMImAd67% (3)
- Correction de La Série N°3 de MPM - 2020-2021Dokumen9 halamanCorrection de La Série N°3 de MPM - 2020-2021MounirBelum ada peringkat
- TD6 MP Mouvement À Forces Centrales 2020-2021 - 230511 - 012958Dokumen4 halamanTD6 MP Mouvement À Forces Centrales 2020-2021 - 230511 - 012958RamboAkkkoBelum ada peringkat
- Travaux Dirigés de Mecanique Quantique 20-21Dokumen5 halamanTravaux Dirigés de Mecanique Quantique 20-21PAPOUBelum ada peringkat
- TD Theoreme D'ampereDokumen12 halamanTD Theoreme D'amperekhawlaaaaBelum ada peringkat
- Math Premier Cycle Ens Yaounde 2008Dokumen2 halamanMath Premier Cycle Ens Yaounde 2008afrilaneBelum ada peringkat
- TD2 - Meca1 - Sigma - 2021 - CopieDokumen3 halamanTD2 - Meca1 - Sigma - 2021 - Copieblandinette momoBelum ada peringkat
- TD Série1 TorseursDokumen2 halamanTD Série1 TorseursEl Matador100% (1)
- TD Magnétostatique-Série 4-2021Dokumen5 halamanTD Magnétostatique-Série 4-2021Zakaria MJBelum ada peringkat
- Applications Linéaires PDFDokumen38 halamanApplications Linéaires PDFAllaoua LalaounaBelum ada peringkat
- TD Electricite3 P2013 Nafidi-SMP4Dokumen16 halamanTD Electricite3 P2013 Nafidi-SMP4Samira KaBelum ada peringkat
- Corrigés de La Série 3 - Part1Dokumen8 halamanCorrigés de La Série 3 - Part1ZouikrBelum ada peringkat
- TD Thermique 1 Me PDFDokumen18 halamanTD Thermique 1 Me PDFAņdré Lədøůx Støn'hëårtBelum ada peringkat
- Cours - Interactions Sol StructureDokumen33 halamanCours - Interactions Sol StructureAdam Mounsi100% (1)
- Acrotere Et EscalierDokumen12 halamanAcrotere Et EscalierAdam Mounsi0% (1)
- 0 Hydraulique Des SolsDokumen58 halaman0 Hydraulique Des SolsRayane Rana100% (1)
- Exercice Descente de ChargesDokumen1 halamanExercice Descente de ChargesAdam MounsiBelum ada peringkat
- Cours - Interactions Sol StructureDokumen33 halamanCours - Interactions Sol StructureAdam Mounsi100% (1)
- CTN504 Cours 7 PDFDokumen32 halamanCTN504 Cours 7 PDFWalid MatallahBelum ada peringkat
- CTN504 Cours 7 PDFDokumen32 halamanCTN504 Cours 7 PDFWalid MatallahBelum ada peringkat
- Cours Vom DjelouahDokumen122 halamanCours Vom Djelouahmahdi123456789Belum ada peringkat
- CTN504 Cours 7 PDFDokumen32 halamanCTN504 Cours 7 PDFWalid MatallahBelum ada peringkat
- CTN504 Cours 7 PDFDokumen32 halamanCTN504 Cours 7 PDFWalid MatallahBelum ada peringkat
- Autodesk Robot Structural Analysis Professional 2012 D Essai PDFDokumen34 halamanAutodesk Robot Structural Analysis Professional 2012 D Essai PDFAdam MounsiBelum ada peringkat
- TD PDFDokumen39 halamanTD PDFFatima OukaddiBelum ada peringkat
- CTN504 Cours 7 PDFDokumen32 halamanCTN504 Cours 7 PDFWalid MatallahBelum ada peringkat
- 131211FSP03 (34) DDC EtudiantsDokumen9 halaman131211FSP03 (34) DDC EtudiantsArij Naily Ep HammamiBelum ada peringkat
- Caractrisques Gomtriques Des SectionsDokumen12 halamanCaractrisques Gomtriques Des SectionsLouc IngBelum ada peringkat
- CTN504 Cours 7 PDFDokumen32 halamanCTN504 Cours 7 PDFWalid MatallahBelum ada peringkat
- 05 Cfms Iss Point de Vue de L Ing Nieur Structure G. Sayer PDFDokumen43 halaman05 Cfms Iss Point de Vue de L Ing Nieur Structure G. Sayer PDFAdam MounsiBelum ada peringkat
- UTF 8 B Q29ycmlnw6kgSW50ZXJyb2dhdGlvbjFhUGh5czMucGRm PDFDokumen1 halamanUTF 8 B Q29ycmlnw6kgSW50ZXJyb2dhdGlvbjFhUGh5czMucGRm PDFhakim1348Belum ada peringkat
- St2an Vibrations OndesDokumen124 halamanSt2an Vibrations OndesBachirBelahssiniBelum ada peringkat
- Cour EscalierDokumen60 halamanCour EscalierBachir Abou Akram100% (1)
- Corr - Ouvrages SouterrainsDokumen4 halamanCorr - Ouvrages SouterrainsAdam MounsiBelum ada peringkat
- Viibratiions Et OndesDokumen5 halamanViibratiions Et OndesAdam MounsiBelum ada peringkat
- Test N°1 - Correction D - Nov16Dokumen1 halamanTest N°1 - Correction D - Nov16Adam MounsiBelum ada peringkat
- Cours RDM1Dokumen48 halamanCours RDM1Sou KaiinaBelum ada peringkat
- Méthodes ÉnergétiquesDokumen25 halamanMéthodes ÉnergétiquesAdam MounsiBelum ada peringkat
- Polycopie MEFDokumen106 halamanPolycopie MEFoummenalBelum ada peringkat
- Beton Auto 070117Dokumen2 halamanBeton Auto 070117Adam MounsiBelum ada peringkat
- Partiei Chapitre 02Dokumen16 halamanPartiei Chapitre 02Ammar AmiourBelum ada peringkat
- TD 3 ElectromoteurDokumen3 halamanTD 3 ElectromoteurAmadou SARRBelum ada peringkat
- 3 La Conductivité ElctriqueDokumen8 halaman3 La Conductivité ElctriqueRaouf BendeniaBelum ada peringkat
- p1331 Pipettes - Contrôle MétrologiqueDokumen16 halamanp1331 Pipettes - Contrôle Métrologiquemazell anna100% (1)
- N°47 ANNALES UE3 Complete + CB + CorrectionDokumen125 halamanN°47 ANNALES UE3 Complete + CB + Correctionbennessiblina2003Belum ada peringkat
- Constante D Acidite TP Enonce + CorrigeDokumen3 halamanConstante D Acidite TP Enonce + CorrigeAliFriend100% (1)
- 5444Dokumen10 halaman5444Mohamed OuaggaBelum ada peringkat
- Les Reducteurs de Mesure TC TT PDFDokumen19 halamanLes Reducteurs de Mesure TC TT PDFSoumya SalmiBelum ada peringkat
- Puissance Électrique - Puissance Thermique Groupe Electrogene Dissipation ThermiqueDokumen15 halamanPuissance Électrique - Puissance Thermique Groupe Electrogene Dissipation ThermiqueAnonymous dM4QtbCJ0Belum ada peringkat
- Corrige Math Ensp 2000 PDFDokumen7 halamanCorrige Math Ensp 2000 PDFbrad bBelum ada peringkat
- Capteurs 2Dokumen29 halamanCapteurs 2Walid MechriBelum ada peringkat
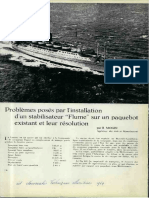
- Un Stabilisateur Flume Sur: Problèmes Posés Existant Et Leur RésolutionDokumen14 halamanUn Stabilisateur Flume Sur: Problèmes Posés Existant Et Leur Résolutionrida rodaBelum ada peringkat
- La Rose Aux Treize Pétales (Buen Libro de Kabala)Dokumen68 halamanLa Rose Aux Treize Pétales (Buen Libro de Kabala)kabballerodelagruta100% (5)
- Test HGDokumen6 halamanTest HGFaiçalEssaberyBelum ada peringkat
- Le+Dipôle+RL Cours FRDokumen8 halamanLe+Dipôle+RL Cours FRالغزيزال الحسن EL GHZIZAL Hassane0% (1)
- Chapitre 5Dokumen7 halamanChapitre 5Aliouat RoumaissaBelum ada peringkat
- 3 Méthode Forces 1Dokumen12 halaman3 Méthode Forces 1mariem hammamiBelum ada peringkat
- Réponses TP3 MECANIQUE PHYSIQUE 1 2023-2024Dokumen2 halamanRéponses TP3 MECANIQUE PHYSIQUE 1 2023-2024Halima ZighBelum ada peringkat
- Chap1 - Proprietes Physiques Des Sols 1Dokumen27 halamanChap1 - Proprietes Physiques Des Sols 1amani nedjadi100% (1)
- Exemples de Calcul de La Résistance Au Feu de Poutres Mixtes Continues Non Enrobées-2001Dokumen9 halamanExemples de Calcul de La Résistance Au Feu de Poutres Mixtes Continues Non Enrobées-2001sautier_thomasBelum ada peringkat
- Note Technique de Stabilite Du Caisson Type 1 Avec Ballastage ProvisoireDokumen7 halamanNote Technique de Stabilite Du Caisson Type 1 Avec Ballastage ProvisoireSaid Mrf100% (1)
- Colle - 1 - SujetDokumen4 halamanColle - 1 - SujetMarieme BoutraihBelum ada peringkat
- Chap1 Corrig Exo PDFDokumen4 halamanChap1 Corrig Exo PDFmou niaBelum ada peringkat
- Série 5 - La Gravitation UniverselleDokumen2 halamanSérie 5 - La Gravitation Universellenouhaila queen100% (1)
- 3 2 Poa PDFDokumen134 halaman3 2 Poa PDFIsmael OlgueraBelum ada peringkat
- Physique MP-MP - Tout Le Programme 2014 Sous Forme D'exercices CorrigésDokumen303 halamanPhysique MP-MP - Tout Le Programme 2014 Sous Forme D'exercices CorrigésAdam Diaby100% (2)
- 2010-11 Cours 02-Travail ThermoDokumen17 halaman2010-11 Cours 02-Travail ThermoSèíf KâdŕïBelum ada peringkat
- RDM Chap 08Dokumen18 halamanRDM Chap 08Abdessamad Lidlissi100% (1)
- CAPP06 Massevolumique ProfDokumen4 halamanCAPP06 Massevolumique ProfTouriaBenKhouya100% (1)
- Francisco NIETO VIDAL. Développement Spirituel Après La MortDokumen108 halamanFrancisco NIETO VIDAL. Développement Spirituel Après La Mortwilly ioriBelum ada peringkat
- Chap1 - Equations Aux Dimensions Et Unités V - 2019-2020Dokumen28 halamanChap1 - Equations Aux Dimensions Et Unités V - 2019-2020Melek DammakBelum ada peringkat