Anda mungkin juga menyukai
- Introduction To Eletric Drives Fall 1997 - D.W.Novotny, T.A.Lipo - University of Wisconsin Madison PDFDokumen408 halamanIntroduction To Eletric Drives Fall 1997 - D.W.Novotny, T.A.Lipo - University of Wisconsin Madison PDFMyrlena Raquelly100% (4)
- Matlab Tool Box ListDokumen4 halamanMatlab Tool Box ListMuthukumaranBelum ada peringkat
- CDokumen15 halamanCjassi7nishadBelum ada peringkat
- Using Matlab With Python Cheat SheetDokumen1 halamanUsing Matlab With Python Cheat Sheetpravin22757670% (1)
- Computer Vision For Visual Effects PDFDokumen410 halamanComputer Vision For Visual Effects PDFFrederic MenezesBelum ada peringkat
- iOS Security White Paper Feb 2014Dokumen33 halamaniOS Security White Paper Feb 2014Mikey CampbellBelum ada peringkat
- Example 1: Function Grade (Marks As Integer) As StringDokumen12 halamanExample 1: Function Grade (Marks As Integer) As StringPallab DattaBelum ada peringkat
- Message Passing Interface (MPI)Dokumen14 halamanMessage Passing Interface (MPI)Judah OkeleyeBelum ada peringkat
- A Matlab Primer: by Jo Ao Lopes, Vitor LopesDokumen45 halamanA Matlab Primer: by Jo Ao Lopes, Vitor LopesSara CoutinhoBelum ada peringkat
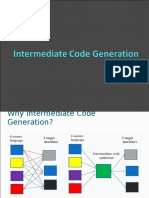
- Intermediate Code GenerationDokumen62 halamanIntermediate Code GenerationSalithaBelum ada peringkat
- Evaluating Aircraft Turnaround Process in Airport Design and OperationsDokumen225 halamanEvaluating Aircraft Turnaround Process in Airport Design and OperationsFrederic MenezesBelum ada peringkat
- Nonlinear Programming 4: Proceedings of the Nonlinear Programming Symposium 4 Conducted by the Computer Sciences Department at the University of Wisconsin–Madison, July 14-16, 1980Dari EverandNonlinear Programming 4: Proceedings of the Nonlinear Programming Symposium 4 Conducted by the Computer Sciences Department at the University of Wisconsin–Madison, July 14-16, 1980Olvi L. MangasarianBelum ada peringkat
- Cpu SchedulingDokumen26 halamanCpu SchedulingBobby chBelum ada peringkat
- Full-State Feedback & Observer DesignDokumen29 halamanFull-State Feedback & Observer DesignBi Chen100% (1)
- ITE 6.0 A+ Cert Practice Exam 1 Answers 2018 2019 100% ITE 6.0 A+ Cert Practice Exam 1 Answers 2018 2019 100%Dokumen18 halamanITE 6.0 A+ Cert Practice Exam 1 Answers 2018 2019 100% ITE 6.0 A+ Cert Practice Exam 1 Answers 2018 2019 100%Egy RenataBelum ada peringkat
- Paper Parallel Merge SortDokumen8 halamanPaper Parallel Merge SortmoginhBelum ada peringkat
- DLLs and GFortranDokumen24 halamanDLLs and GFortranbendel_boyBelum ada peringkat
- Fortran ResourcesDokumen85 halamanFortran ResourcesKian ChuanBelum ada peringkat
- Fortran 95Dokumen38 halamanFortran 95HumbertoBelum ada peringkat
- Formatted and Unformatted InputDokumen2 halamanFormatted and Unformatted InputUjjwal VermaBelum ada peringkat
- Chapter 5 - The Processor, Datapath and ControlDokumen23 halamanChapter 5 - The Processor, Datapath and ControlBijay MishraBelum ada peringkat
- Operating Systems LabDokumen3 halamanOperating Systems LabVenkat Nani0% (1)
- Code Generation PDFDokumen19 halamanCode Generation PDFRagav SrvBelum ada peringkat
- Online Job Portal System: Microroot Poc Technology Pvt. LTDDokumen29 halamanOnline Job Portal System: Microroot Poc Technology Pvt. LTDsfimarpgdm2012Belum ada peringkat
- Unit Testing C++ Code - CppUnit by ExampleDokumen11 halamanUnit Testing C++ Code - CppUnit by ExamplesreejithmadamanaBelum ada peringkat
- Direct Memory Access (DMA) Is A Feature of Modern Computers That Allows Certain HardwareDokumen15 halamanDirect Memory Access (DMA) Is A Feature of Modern Computers That Allows Certain HardwareAshutosh KumarBelum ada peringkat
- DFD & CFDDokumen8 halamanDFD & CFDanarijaatBelum ada peringkat
- Introduction Into C++ Builds With Gradle - CodeProjectDokumen6 halamanIntroduction Into C++ Builds With Gradle - CodeProjectgfgomesBelum ada peringkat
- SSCDNotes PDFDokumen53 halamanSSCDNotes PDFshreenathk_n100% (1)
- The Design and Analysis of Parallel AlgorithmsDokumen470 halamanThe Design and Analysis of Parallel AlgorithmsJustin SmithBelum ada peringkat
- CMSC 312 Project 2Dokumen9 halamanCMSC 312 Project 2eswarsai saiBelum ada peringkat
- Structure Programming ApproachDokumen23 halamanStructure Programming ApproachjayeshBelum ada peringkat
- Embedded LabDokumen98 halamanEmbedded LabRajkumarBelum ada peringkat
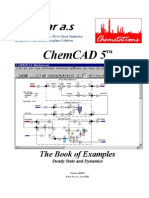
- Chemcad 5: The Book of ExamplesDokumen66 halamanChemcad 5: The Book of Examplesdanan widjanarkoBelum ada peringkat
- Pid Controller Tuning: S.no Name of The ChapterDokumen35 halamanPid Controller Tuning: S.no Name of The ChapterAmit TripathiBelum ada peringkat
- IT Essentials Chapter 6 Exam Answers 2018 2019 Version 6.0 100% IT Essentials Chapter 6 Exam Answers 2018 2019 Version 6.0 100%Dokumen8 halamanIT Essentials Chapter 6 Exam Answers 2018 2019 Version 6.0 100% IT Essentials Chapter 6 Exam Answers 2018 2019 Version 6.0 100%Egy RenataBelum ada peringkat
- Linux Process Scheduling ExplainedDokumen23 halamanLinux Process Scheduling ExplainedIjazKhanBelum ada peringkat
- Cpp-Collected Lab ManualDokumen31 halamanCpp-Collected Lab ManualGalatu BashaBelum ada peringkat
- Lab 10.3 - Configure IPv6 AddressingDokumen3 halamanLab 10.3 - Configure IPv6 AddressingRecky JimmyBelum ada peringkat
- Working With Session ParametersDokumen10 halamanWorking With Session ParametersyprajuBelum ada peringkat
- IPv4 Address Structure and SubnettingDokumen3 halamanIPv4 Address Structure and SubnettingAku Cuma ikut-ikutanBelum ada peringkat
- Class Diagrams Using Star UMLDokumen14 halamanClass Diagrams Using Star UMLPrathamesh BhosaleBelum ada peringkat
- Design of Cooling Tower With IotDokumen4 halamanDesign of Cooling Tower With IotAnonymous kw8Yrp0R5rBelum ada peringkat
- Model Gravity Flow TankDokumen11 halamanModel Gravity Flow TankTiar_Rahman_9553Belum ada peringkat
- 8.6.1 PTDokumen6 halaman8.6.1 PTGeral Enrrique Navarro ReyesBelum ada peringkat
- LiteCAD ReferenciaDokumen36 halamanLiteCAD Referenciacrls_marcosBelum ada peringkat
- Bayesian Network SolutionsDokumen7 halamanBayesian Network SolutionsVin NgoBelum ada peringkat
- Decoding PMS5003 CodeDokumen2 halamanDecoding PMS5003 CodeSheldon Savio Napoleão PintoBelum ada peringkat
- Getting acquainted with the C program structure and basic I/ODokumen63 halamanGetting acquainted with the C program structure and basic I/OParul GargBelum ada peringkat
- TICTOCDokumen6 halamanTICTOCArpit PatelBelum ada peringkat
- File Handling in CDokumen58 halamanFile Handling in CSalman Javed BajwaBelum ada peringkat
- WohooDokumen2 halamanWohooakr_6590% (1)
- Automate printer tasksDokumen12 halamanAutomate printer tasksLênin CanutoBelum ada peringkat
- Mindtree 2018 ProgramsDokumen28 halamanMindtree 2018 Programsmd ajuBelum ada peringkat
- 2.0 - Pointers and ArraysDokumen13 halaman2.0 - Pointers and ArrayssangeethaBelum ada peringkat
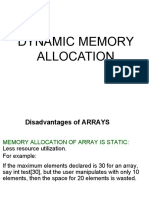
- 14-Dynamic Memory AllocationDokumen36 halaman14-Dynamic Memory AllocationPaksham MahajanBelum ada peringkat
- Operating System: Operating Systems: Internals and Design PrinciplesDokumen81 halamanOperating System: Operating Systems: Internals and Design PrinciplesRamadan ElhendawyBelum ada peringkat
- Principles of Compiler Design - Tutorial 9Dokumen7 halamanPrinciples of Compiler Design - Tutorial 9dani cabiloBelum ada peringkat
- LAB 4 Shell Scripting 2Dokumen8 halamanLAB 4 Shell Scripting 2Shahid ZikriaBelum ada peringkat
- CS333 Midterm Exam from Alexandria UniversityDokumen4 halamanCS333 Midterm Exam from Alexandria UniversityRofaelEmil100% (2)
- Digital Data Transmission TechniquesDokumen21 halamanDigital Data Transmission TechniquesHoney RoseBelum ada peringkat
- Opearating System LAb FilesDokumen128 halamanOpearating System LAb FilesAshish100% (1)
- GCC Profile Guided OptimizationDokumen47 halamanGCC Profile Guided OptimizationTuxology.netBelum ada peringkat
- Pss (1) SB Cpu 3 Eth-2: Operating Manual - Item No. 21 867-01Dokumen29 halamanPss (1) SB Cpu 3 Eth-2: Operating Manual - Item No. 21 867-01RUBENBelum ada peringkat
- Writing Message Passing Parallel Programs With MPI: Course NotesDokumen80 halamanWriting Message Passing Parallel Programs With MPI: Course Notesalexverde3Belum ada peringkat
- Optimal Symmetric Multimodal Templates and Concatenated Random Forests For Supervised Brain Tumor Segmentation (Simplified) With ANTsRDokumen17 halamanOptimal Symmetric Multimodal Templates and Concatenated Random Forests For Supervised Brain Tumor Segmentation (Simplified) With ANTsRFrederic MenezesBelum ada peringkat
- Narrowing The Gap Random Forests in Theory and in PracticeDokumen9 halamanNarrowing The Gap Random Forests in Theory and in PracticeSabilah MargirizkiBelum ada peringkat
- A Gentle Introduction To Deep Learning in Medical Image ProcessingDokumen31 halamanA Gentle Introduction To Deep Learning in Medical Image ProcessingFrederic MenezesBelum ada peringkat
- The Multimodal Brain Tumor Image Segmentation Benchmark (BRATS)Dokumen32 halamanThe Multimodal Brain Tumor Image Segmentation Benchmark (BRATS)Frederic MenezesBelum ada peringkat
- 00 State-Of-The-Art in Parallel Computing With RDokumen52 halaman00 State-Of-The-Art in Parallel Computing With RFrederic MenezesBelum ada peringkat
- Brian C. Houlihan: 1413 SW 11th Street Cape Coral, FL 33991Dokumen1 halamanBrian C. Houlihan: 1413 SW 11th Street Cape Coral, FL 33991Brian HoulihanBelum ada peringkat
- Normalization: Dr. M. Brindha Assistant Professor Department of CSE NIT, Trichy-15Dokumen47 halamanNormalization: Dr. M. Brindha Assistant Professor Department of CSE NIT, Trichy-15Nimish AgrawalBelum ada peringkat
- Data Structures and Algorithms (CS-2001Dokumen120 halamanData Structures and Algorithms (CS-2001Debabala SwainBelum ada peringkat
- VB6 Bank Management System with MS Access DatabaseDokumen29 halamanVB6 Bank Management System with MS Access Databaserakshitha sBelum ada peringkat
- Openshift Container Platform 4.4: ArchitectureDokumen54 halamanOpenshift Container Platform 4.4: ArchitecturebbierrBelum ada peringkat
- LOAD FLOW USING NEWTON RAPHSONDokumen6 halamanLOAD FLOW USING NEWTON RAPHSONJyoti Prakash LenkaBelum ada peringkat
- HexaDokumen128 halamanHexaSandeep GajwelBelum ada peringkat
- 10 Top Advantages and Disadvantages of Technology in Education - Green Garage PDFDokumen5 halaman10 Top Advantages and Disadvantages of Technology in Education - Green Garage PDFnadheer bashirBelum ada peringkat
- UML Component Diagram GuideDokumen30 halamanUML Component Diagram GuideBawa CoderBelum ada peringkat
- Chapter 2Dokumen4 halamanChapter 2prisharathod925Belum ada peringkat
- Hawassa University IOT RUP Software ProcessDokumen17 halamanHawassa University IOT RUP Software ProcessZobahaa HorunkuBelum ada peringkat
- Lab. Sheet Seven: Data Structure LaboratoryDokumen7 halamanLab. Sheet Seven: Data Structure LaboratoryxzBelum ada peringkat
- MessageDokumen4 halamanMessageJoão LucasBelum ada peringkat
- Understanding Relational Databases in 40 CharactersDokumen18 halamanUnderstanding Relational Databases in 40 CharactersKristine MagsayoBelum ada peringkat
- Virtual Memory Management Using Memory BallooningDokumen5 halamanVirtual Memory Management Using Memory BallooningsoniathalavoorBelum ada peringkat
- File Transfer Protocol (FTP) : Mcgraw-Hill ©the Mcgraw-Hill Companies, Inc., 2000Dokumen25 halamanFile Transfer Protocol (FTP) : Mcgraw-Hill ©the Mcgraw-Hill Companies, Inc., 2000GauravgBelum ada peringkat
- Mod 4 & 5 Mat 4 AsstDokumen6 halamanMod 4 & 5 Mat 4 AsstHarsha KasaragodBelum ada peringkat
- Essential IT controls for risk managementDokumen196 halamanEssential IT controls for risk managementvishal jalanBelum ada peringkat
- Inview message and variable triggeringDokumen2 halamanInview message and variable triggeringGabriel David Paez CamposBelum ada peringkat
- Timbercrete Structural Design-2Dokumen35 halamanTimbercrete Structural Design-2Al-Ain HomesBelum ada peringkat
- Barangay Cabalabaguan Computer Based SystemDokumen50 halamanBarangay Cabalabaguan Computer Based SystemKathrina Mae GulmaticoBelum ada peringkat
- PrimeFaces Showcase Phtcam2Dokumen1 halamanPrimeFaces Showcase Phtcam2jbsysatmBelum ada peringkat
- Sankalp SawantDokumen4 halamanSankalp SawantdhirajBelum ada peringkat
- WowzaMediaServerPro UsersGuideDokumen80 halamanWowzaMediaServerPro UsersGuidemerbywerbyBelum ada peringkat
- Unit - 1 SC FinalDokumen67 halamanUnit - 1 SC FinalmalaBelum ada peringkat
- Digital Marketing Marketing Tools: Franchise AdvertisingDokumen29 halamanDigital Marketing Marketing Tools: Franchise AdvertisingMohammedAlQureshiBelum ada peringkat
- FixBadISO dumpsDokumen1 halamanFixBadISO dumpsGold4allBelum ada peringkat
- PKS UserGuide PDFDokumen53 halamanPKS UserGuide PDFrigaut74Belum ada peringkat