Anda mungkin juga menyukai
- PowerShell Scripting v7.3Dokumen3.401 halamanPowerShell Scripting v7.3khundaliniBelum ada peringkat
- Hypothesis Testing - A Visual Introduction To Statistical SignificanceDokumen137 halamanHypothesis Testing - A Visual Introduction To Statistical Significancekhundalini100% (2)
- Blazor WebAssembly by Example - A Project-Based Guide To Building Web Apps With .NET, Blazor WebAssembly, and C#Dokumen267 halamanBlazor WebAssembly by Example - A Project-Based Guide To Building Web Apps With .NET, Blazor WebAssembly, and C#khundalini100% (1)
- Programming ML - NET (Dino Esposito, Francesco Esposito)Dokumen577 halamanProgramming ML - NET (Dino Esposito, Francesco Esposito)khundaliniBelum ada peringkat
- Law of Large NumbersDokumen24 halamanLaw of Large NumbersSeamusFingBelum ada peringkat
- Lotto Primer by Hannibal Bawagan (2006)Dokumen29 halamanLotto Primer by Hannibal Bawagan (2006)Hannibal Bawagan83% (6)
- Ultimate NIST CSF ChecklistDokumen19 halamanUltimate NIST CSF Checklistkhundalini100% (2)
- Selenium Cheat Sheet GuideDokumen4 halamanSelenium Cheat Sheet GuideNandhakumar SethupandiyanBelum ada peringkat
- Containerisation WithDokumen74 halamanContainerisation WithviswatejaBelum ada peringkat
- Lotto Primer by Hannibal Bawagan (2006)Dokumen29 halamanLotto Primer by Hannibal Bawagan (2006)Hannibal Bawagan83% (6)
- Your Future in AI ResourcesDokumen2 halamanYour Future in AI ResourceskhundaliniBelum ada peringkat
- Binomial Distribution Cheat SheetDokumen1 halamanBinomial Distribution Cheat SheetkhundaliniBelum ada peringkat
- Tipos de Visualizações GráficasDokumen4 halamanTipos de Visualizações GráficaskhundaliniBelum ada peringkat
- RabbitMQ Essentials - 2nd Edition, by Lovisa JohanssonDokumen190 halamanRabbitMQ Essentials - 2nd Edition, by Lovisa JohanssonkhundaliniBelum ada peringkat
- Winning Lotto Secrets BookDokumen157 halamanWinning Lotto Secrets Bookkhundalini67% (3)
- LottoMagicTeam WinThatLottoDokumen48 halamanLottoMagicTeam WinThatLottoAnonymous KadVHKC4y892% (13)
- Probability With The Binomial Distribution and Pascal's Triangle - A Key Idea in StatisticsDokumen54 halamanProbability With The Binomial Distribution and Pascal's Triangle - A Key Idea in Statisticskhundalini100% (1)
- Winning Lotto Strategies Pdf18 2006Dokumen67 halamanWinning Lotto Strategies Pdf18 2006Artisan Pro94% (17)
- Pascals Triangle MAV17Dokumen31 halamanPascals Triangle MAV17robidjoBelum ada peringkat
- Binomial Distribution Cheat SheetDokumen1 halamanBinomial Distribution Cheat SheetkhundaliniBelum ada peringkat
- Combinatory Reduction Systems (PHD Thesis), by Jan Willem Klop PDFDokumen341 halamanCombinatory Reduction Systems (PHD Thesis), by Jan Willem Klop PDFkhundaliniBelum ada peringkat
- Linear RegressionDokumen56 halamanLinear RegressionRanz CruzBelum ada peringkat
- Combinatory Reduction Systems (PHD Thesis), by Jan Willem Klop PDFDokumen341 halamanCombinatory Reduction Systems (PHD Thesis), by Jan Willem Klop PDFkhundaliniBelum ada peringkat
- Linear Regression and Correlation - A Beginner's GuideDokumen220 halamanLinear Regression and Correlation - A Beginner's Guidekhundalini100% (2)
- Build Platform Independent Applications UsingDokumen6 halamanBuild Platform Independent Applications UsingkhundaliniBelum ada peringkat
- Dan Morris - Bayes' Theorem Examples - A Visual Introduction For Beginners-Blue Windmill (2016) PDFDokumen174 halamanDan Morris - Bayes' Theorem Examples - A Visual Introduction For Beginners-Blue Windmill (2016) PDFMd Asif AlamBelum ada peringkat
- POSReady Creating A ProofofConcept POS ApplicationDokumen10 halamanPOSReady Creating A ProofofConcept POS ApplicationkhundaliniBelum ada peringkat
- MR1418 Deviates PDFDokumen204 halamanMR1418 Deviates PDFpefsdfrfsdfsanjfsdfsdansdfsadfsdBelum ada peringkat
- Build A Real-Time Serverless Chat App With Azure FunctionsDokumen23 halamanBuild A Real-Time Serverless Chat App With Azure FunctionskhundaliniBelum ada peringkat
- Handbook of Regression MethodsDokumen654 halamanHandbook of Regression Methodskhundalini100% (3)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Atmega 8 Connection To 74HC595: Circuit DiagramDokumen3 halamanAtmega 8 Connection To 74HC595: Circuit DiagramRuhollah PurbafraniBelum ada peringkat
- Computer Organization & Articture No. 1 From APCOMSDokumen16 halamanComputer Organization & Articture No. 1 From APCOMSNaveedBelum ada peringkat
- MotorolaDokumen3 halamanMotorolazokiBelum ada peringkat
- CAO - Midterm - Fall 2020 PDFDokumen3 halamanCAO - Midterm - Fall 2020 PDFsaif9970Belum ada peringkat
- HP2 H08Dokumen51 halamanHP2 H08Aby George100% (1)
- Computer McqsDokumen29 halamanComputer Mcqsshakeel kingBelum ada peringkat
- MIPS Instruction SetDokumen7 halamanMIPS Instruction Setsreenidhi sarmaBelum ada peringkat
- Epson LQ-2180 Service ManualDokumen56 halamanEpson LQ-2180 Service ManualEd WheatBelum ada peringkat
- R18 B.Tech Eee Iii YearDokumen42 halamanR18 B.Tech Eee Iii YearNIMMANAGANTI RAMAKRISHNABelum ada peringkat
- CSI3131 Mid-Term ExamDokumen10 halamanCSI3131 Mid-Term ExamAndrey SafonovBelum ada peringkat
- Basic SAP-1 Computer Architecture ExplainedDokumen9 halamanBasic SAP-1 Computer Architecture ExplainedAshna100% (1)
- Computer Abstractions and Technology: Adapted by Prof. Gheith AbandahDokumen35 halamanComputer Abstractions and Technology: Adapted by Prof. Gheith Abandahasaa sdafBelum ada peringkat
- DDI0489B Cortex m7 TRMDokumen145 halamanDDI0489B Cortex m7 TRMPrasika YogaBelum ada peringkat
- BP 2061 PostgreSQL On NutanixDokumen34 halamanBP 2061 PostgreSQL On NutanixIlknur DuranBelum ada peringkat
- Java MultithreadingDokumen14 halamanJava MultithreadingSummia ParveenBelum ada peringkat
- Developing With Formal Methods at BedRock Systems Inc.Dokumen10 halamanDeveloping With Formal Methods at BedRock Systems Inc.jtpaaschBelum ada peringkat
- Manual SuzukiDokumen41 halamanManual SuzukiXavier ValenciaBelum ada peringkat
- 8086 Section 3-4Dokumen4 halaman8086 Section 3-4Jaspreet KaurBelum ada peringkat
- Abbyy Finereader Engine: Performance GuideDokumen9 halamanAbbyy Finereader Engine: Performance GuideJJJBelum ada peringkat
- Techno-Commercial IOT Lab Setup Version 3 3 SEPTEMBER - 25-2019Dokumen31 halamanTechno-Commercial IOT Lab Setup Version 3 3 SEPTEMBER - 25-2019Rajesh LalwaniBelum ada peringkat
- Read Write Data Doc I-OLINKDokumen33 halamanRead Write Data Doc I-OLINKHéctor CruzBelum ada peringkat
- 80x85 FormatDokumen17 halaman80x85 Formatnorberto_1Belum ada peringkat
- DSP Lab ManualDokumen84 halamanDSP Lab ManualGowtham Raj100% (2)
- CST202 QPDokumen2 halamanCST202 QPSreedevi R KrishnanBelum ada peringkat
- CPU 31xC and CPU 31x Installation ManualDokumen306 halamanCPU 31xC and CPU 31x Installation Manualmcantraks17Belum ada peringkat
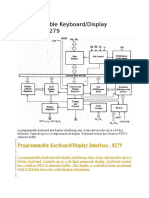
- Programmable Keyboard/Display Interface - 8279Dokumen10 halamanProgrammable Keyboard/Display Interface - 8279prashantvlsiBelum ada peringkat
- 8051 Microcontroller ProgramDokumen15 halaman8051 Microcontroller Programkaushikjbe100% (1)
- SSS 2 ICT (Second TERM - FINAL EXAM) 2022-2023Dokumen4 halamanSSS 2 ICT (Second TERM - FINAL EXAM) 2022-2023Samuel AdeshinaBelum ada peringkat
- Lecture5 INSTRUCTIONS MICROPROCESSOR APLICATIONSDokumen58 halamanLecture5 INSTRUCTIONS MICROPROCESSOR APLICATIONSagustin cordobaBelum ada peringkat
- COA Question Bank PDFDokumen27 halamanCOA Question Bank PDFPoovarasanBelum ada peringkat