Anda mungkin juga menyukai
- HackSpaceMag15 PDFDokumen132 halamanHackSpaceMag15 PDFpbikerator100% (1)
- Programming Arduino Next Steps: Going Further with Sketches, Second EditionDari EverandProgramming Arduino Next Steps: Going Further with Sketches, Second EditionPenilaian: 3 dari 5 bintang3/5 (3)
- Arduino and Raspberry Pi Sensor Projects for the Evil GeniusDari EverandArduino and Raspberry Pi Sensor Projects for the Evil GeniusBelum ada peringkat
- WDSguideDokumen202 halamanWDSguidechandan1020Belum ada peringkat
- Python Programming 101 PDFDokumen108 halamanPython Programming 101 PDFArt DollosaBelum ada peringkat
- Arduino Line FollowerDokumen10 halamanArduino Line FollowerpedroBelum ada peringkat
- Handbook Protel 99 SeDokumen686 halamanHandbook Protel 99 SeradamBelum ada peringkat
- 00 Dobot Blockly WorkbookDokumen182 halaman00 Dobot Blockly Workbookdborcic61Belum ada peringkat
- Yamanta's AutoCAD Manual (2D Drafting)Dokumen333 halamanYamanta's AutoCAD Manual (2D Drafting)yamantarBelum ada peringkat
- Lecture Notes in Physics: MonographsDokumen200 halamanLecture Notes in Physics: MonographsMarcos GouveiaBelum ada peringkat
- FANUC-16,18-C Operation & Maintenance HandbookDokumen456 halamanFANUC-16,18-C Operation & Maintenance HandbookPeter Skiadaresis100% (2)
- Borang Penilaian Prestasi Ncs-Core Abilities: Jpk/Ca/PpDokumen4 halamanBorang Penilaian Prestasi Ncs-Core Abilities: Jpk/Ca/PpGevita GvBelum ada peringkat
- All-In-One Robot Education: Dobot Product CatalogDokumen32 halamanAll-In-One Robot Education: Dobot Product CatalogWendy Satia NBelum ada peringkat
- Catalog DoBotDokumen5 halamanCatalog DoBotAchmadErry100% (1)
- Dobot Scratch User Guide V1.3.1 PDFDokumen67 halamanDobot Scratch User Guide V1.3.1 PDFdborcic61Belum ada peringkat
- 0 ATR - 600 ATA104 AVS-INTRO Rev-02Dokumen19 halaman0 ATR - 600 ATA104 AVS-INTRO Rev-02negrotettBelum ada peringkat
- Arduino NanoDokumen13 halamanArduino NanoHari Krishnan SBelum ada peringkat
- 8960 Entrepreneurship NotesDokumen47 halaman8960 Entrepreneurship NotesMAYENDE ALBERTBelum ada peringkat
- Line Follower Robot PID Control Android Setup PDFDokumen20 halamanLine Follower Robot PID Control Android Setup PDFashu_d_1980100% (1)
- Full Catalog From SAS AutomationDokumen128 halamanFull Catalog From SAS AutomationMichael Krumm100% (1)
- DobotVisionStudio User Guide en V4.1.2Dokumen375 halamanDobotVisionStudio User Guide en V4.1.2faiz 555Belum ada peringkat
- How To Start Career in RoboticsDokumen7 halamanHow To Start Career in RoboticsJonathan LucaBelum ada peringkat
- Line Follower ROBOTDokumen9 halamanLine Follower ROBOTGurpreet SinghBelum ada peringkat
- Functional Test Coverage TechniquesDokumen6 halamanFunctional Test Coverage Techniqueskarthik233Belum ada peringkat
- Functional Coverage and Clocking Blocks PDFDokumen58 halamanFunctional Coverage and Clocking Blocks PDFelumalaianithaBelum ada peringkat
- Solid Modeling Project Sem 2 2014Dokumen5 halamanSolid Modeling Project Sem 2 2014Matthew ShieldsBelum ada peringkat
- FujitsuDokumen30 halamanFujitsuAsnawi Nor AzizanBelum ada peringkat
- Cause and Effect PowerPointDokumen7 halamanCause and Effect PowerPointmsdrawbondBelum ada peringkat
- Cara Import Meteo Data From Different SourceDokumen4 halamanCara Import Meteo Data From Different SourceKania ZahrawatiBelum ada peringkat
- Full Report Fujitsu PrintDokumen16 halamanFull Report Fujitsu PrintBryon DeanBelum ada peringkat
- Najmi Osconf2009Dokumen30 halamanNajmi Osconf2009Harisfazillah JamelBelum ada peringkat
- Embroidery Technique Using Programmable Logic Controller: Usman Institute of TechnologyDokumen48 halamanEmbroidery Technique Using Programmable Logic Controller: Usman Institute of TechnologyWajahat AliBelum ada peringkat
- Amir Abdullah Bin Muhamad DamanhuriDokumen45 halamanAmir Abdullah Bin Muhamad Damanhurimr5jalBelum ada peringkat
- Discussion Lab 9Dokumen1 halamanDiscussion Lab 9thevand11100% (1)
- Ranjit ShresthaDokumen18 halamanRanjit ShresthaSunni Magar MotuBelum ada peringkat
- Mini Project For InventorDokumen2 halamanMini Project For InventorKu Bigs0% (3)
- Carta OrganisasiDokumen2 halamanCarta Organisasict asiyahBelum ada peringkat
- 01 Autodesk Inventor User InterfaceDokumen26 halaman01 Autodesk Inventor User Interfacegian_rosas0% (1)
- Farm Land Dangerous Radiation Material Detection Robot - 2Dokumen7 halamanFarm Land Dangerous Radiation Material Detection Robot - 2aminuBelum ada peringkat
- 53-Rfid Asset Control SystemDokumen1 halaman53-Rfid Asset Control SystemzulBelum ada peringkat
- Project I Deadlines (May15EntryY2) v3 FinalDokumen2 halamanProject I Deadlines (May15EntryY2) v3 FinalRexl RxzBelum ada peringkat
- Process Involved in Fyp ApuDokumen15 halamanProcess Involved in Fyp Apusuraj chimchimBelum ada peringkat
- Chapter 2Dokumen6 halamanChapter 2anwarBelum ada peringkat
- Fakulti Teknologi Maklumat Dan Komunikasi Universiti Teknikal Malaysia MelakaDokumen8 halamanFakulti Teknologi Maklumat Dan Komunikasi Universiti Teknikal Malaysia MelakaZakwan ShajBelum ada peringkat
- Robocon 2010 ReportDokumen46 halamanRobocon 2010 ReportDebal Saha100% (1)
- Advanced Robotics Syllabus 13-14 WeeDokumen2 halamanAdvanced Robotics Syllabus 13-14 Weeapi-151190428Belum ada peringkat
- Perform basic robot control (40/40Dokumen5 halamanPerform basic robot control (40/40Walid FarHanBelum ada peringkat
- Industrial Visit Report LatestDokumen11 halamanIndustrial Visit Report Latesthanif100% (2)
- Practicum Innovation ProjectDokumen4 halamanPracticum Innovation ProjectReginald Anthony100% (2)
- MapleSim (UserGuide) - 001 PDFDokumen144 halamanMapleSim (UserGuide) - 001 PDFJosé Luis Haro VeraBelum ada peringkat
- TM1112TRE.433-EnG - Robotics Technology Mapp ROBOTICS - V5.2Dokumen52 halamanTM1112TRE.433-EnG - Robotics Technology Mapp ROBOTICS - V5.2Bhavesh BharambeBelum ada peringkat
- New E-Poster and Brochure Presentation Method for PSM IIDokumen6 halamanNew E-Poster and Brochure Presentation Method for PSM IIRansley TongBelum ada peringkat
- Stefan Odenbach - Magnetoviscous Effects in Ferrofluids (2002)Dokumen161 halamanStefan Odenbach - Magnetoviscous Effects in Ferrofluids (2002)Angel VelasquezBelum ada peringkat
- Sip Logbook ReportDokumen39 halamanSip Logbook ReportAiman Latif0% (1)
- ARL KOWI Robocon v2Dokumen5 halamanARL KOWI Robocon v2rohitkushwaha89Belum ada peringkat
- $$$$ Simulation Compressible Flow OpenFoam PDFDokumen99 halaman$$$$ Simulation Compressible Flow OpenFoam PDFdavid0775Belum ada peringkat
- Faraz Ahmad CVDokumen3 halamanFaraz Ahmad CVer.farazahmadBelum ada peringkat
- Skills Competition (Mechatronics)Dokumen13 halamanSkills Competition (Mechatronics)Putri Chairany100% (1)
- Arduino Sun Tracker TurretDokumen5 halamanArduino Sun Tracker TurretirmianBelum ada peringkat
- Arduino Infrared Remote TutorialDokumen7 halamanArduino Infrared Remote TutorialTházio LimaBelum ada peringkat
- Simple Arduino POV WandDokumen6 halamanSimple Arduino POV WandnemoneoBelum ada peringkat
- Cheap Obstacle Sensor With ArduinoDokumen4 halamanCheap Obstacle Sensor With ArduinogeniunetBelum ada peringkat
- Control 4 Servos with Arduino PWM OutputsDokumen4 halamanControl 4 Servos with Arduino PWM OutputsBienBelum ada peringkat
- Arduino Fencing Scoring ApparatusDokumen8 halamanArduino Fencing Scoring ApparatusJC AMAROBelum ada peringkat
- Arduino Motion Detection LightDokumen5 halamanArduino Motion Detection LightclementBelum ada peringkat
- Build an Autonomous Navigation Robot with ArduinoDokumen14 halamanBuild an Autonomous Navigation Robot with ArduinoShubass RameshBelum ada peringkat
- Arduino 2Wd Smart Robot Car Kit: Level: Beginner GK-KIT-003Dokumen11 halamanArduino 2Wd Smart Robot Car Kit: Level: Beginner GK-KIT-003Umesh Gowda0% (1)
- Rubiks Cube Solver PDFDokumen10 halamanRubiks Cube Solver PDFpbikerator100% (1)
- Line Following Robot With ArduinoDokumen8 halamanLine Following Robot With ArduinopbikeratorBelum ada peringkat
- Line Following Robot With Arduino PDFDokumen4 halamanLine Following Robot With Arduino PDFpbikeratorBelum ada peringkat
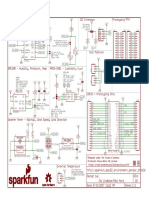
- Sparkfun Esp32 Environment Sensor Shield PDFDokumen1 halamanSparkfun Esp32 Environment Sensor Shield PDFpbikeratorBelum ada peringkat
- Line Following Robot With Arduino PDFDokumen4 halamanLine Following Robot With Arduino PDFpbikeratorBelum ada peringkat
- Optical Encoder For Micro Metal Gearmotor Schematic Diagram PDFDokumen1 halamanOptical Encoder For Micro Metal Gearmotor Schematic Diagram PDFpbikeratorBelum ada peringkat
- Tmssoftware Products PDFDokumen110 halamanTmssoftware Products PDFpbikeratorBelum ada peringkat
- PRICING PROCEDURE STEPSDokumen23 halamanPRICING PROCEDURE STEPSPiyush PandeyBelum ada peringkat
- Add Audacity Soundtrack to SlideshowDokumen15 halamanAdd Audacity Soundtrack to SlideshowMarija LuloBelum ada peringkat
- AI Project Word FileDokumen21 halamanAI Project Word Fileaj3093Belum ada peringkat
- Java Easy Programming GuideDokumen19 halamanJava Easy Programming GuidemadhushansBelum ada peringkat
- General Purpose Input/Output (GPIO)Dokumen6 halamanGeneral Purpose Input/Output (GPIO)sweetsureshBelum ada peringkat
- Minor Project 5th Sem ReportDokumen25 halamanMinor Project 5th Sem ReportAditya MishraBelum ada peringkat
- CBC Case Study on Implementing Agile DSDM for IT ProjectsDokumen2 halamanCBC Case Study on Implementing Agile DSDM for IT ProjectsAhmed MhedhbiBelum ada peringkat
- Android Based Object Detection Application For Food ItemsDokumen6 halamanAndroid Based Object Detection Application For Food ItemsHafza GhafoorBelum ada peringkat
- iDRAC-G8PM9W2 - iDRAC9 - Sy1stem PDFDokumen2 halamaniDRAC-G8PM9W2 - iDRAC9 - Sy1stem PDFSureSh FreemanBelum ada peringkat
- Siemens 7SL32 PDFDokumen2 halamanSiemens 7SL32 PDFDiego XavierBelum ada peringkat
- W54xEL ESMDokumen98 halamanW54xEL ESMCarlos ZarateBelum ada peringkat
- DB2 (Mainframe)Dokumen268 halamanDB2 (Mainframe)naveen_1507Belum ada peringkat
- DCM Technology en V6 0Dokumen143 halamanDCM Technology en V6 0ngamdanBelum ada peringkat
- 10 AI Predictions For 2022Dokumen9 halaman10 AI Predictions For 2022asasdBelum ada peringkat
- LTE Timers: Function at Start/Stop/ExpiryDokumen1 halamanLTE Timers: Function at Start/Stop/ExpiryFaustin Ernst KellerBelum ada peringkat
- N6073Dokumen1 halamanN6073d-fbuser-164431658Belum ada peringkat
- Cisco ONS 15305Dokumen208 halamanCisco ONS 15305Henrynho25Belum ada peringkat
- DVEO Simulcrypt Support - Application NoteDokumen5 halamanDVEO Simulcrypt Support - Application NoteLaszlo ZoltanBelum ada peringkat
- Assignment C++ (N.f.a)Dokumen7 halamanAssignment C++ (N.f.a)Fatin AnisyaBelum ada peringkat
- PNP Basic e Learning - Google SearchDokumen2 halamanPNP Basic e Learning - Google SearchSarah Jane Semblante0% (1)
- Javascript Interview QuestionDokumen8 halamanJavascript Interview QuestionKingslin RmBelum ada peringkat
- HCI Chapter 1Dokumen25 halamanHCI Chapter 1Vanessa CepedaBelum ada peringkat
- MCP 2561Dokumen30 halamanMCP 2561ZaegorBelum ada peringkat
- Talitrix: Manuri DineshDokumen21 halamanTalitrix: Manuri DineshveyronBelum ada peringkat
- Buy An Oracle Cloud SubscriptionDokumen7 halamanBuy An Oracle Cloud SubscriptionRajBelum ada peringkat