Anda mungkin juga menyukai
- Ultrasonic Distance Measurement for Automotive ApplicationsDokumen3 halamanUltrasonic Distance Measurement for Automotive ApplicationsKevin Yepez RuizBelum ada peringkat
- Ultrasonic Sensors in AirDokumen12 halamanUltrasonic Sensors in AirkumargpalaniBelum ada peringkat
- Wave Propogation EffectDokumen4 halamanWave Propogation EffectPrashanth ChikkannanavarBelum ada peringkat
- Ultrasonic SignalingDokumen9 halamanUltrasonic Signalingsriananthakumar06Belum ada peringkat
- Fundamentals of Ultrasonic Inspection : Revised by Leonard J. Bond, Iowa State UniversityDokumen14 halamanFundamentals of Ultrasonic Inspection : Revised by Leonard J. Bond, Iowa State UniversityKranthikiranreddy VuppalaBelum ada peringkat
- Ultrasonic Distance Measurement Using Pulse Echo TechniqueDokumen35 halamanUltrasonic Distance Measurement Using Pulse Echo TechniqueAmarjeet SinghBelum ada peringkat
- Ultrasonic Sensor - Wikipedia, The Free EncyclopediaDokumen3 halamanUltrasonic Sensor - Wikipedia, The Free Encyclopediamuna222Belum ada peringkat
- Optical SensorsDokumen9 halamanOptical SensorsrthrbyBelum ada peringkat
- Design and Development of Microcontroller Based Ultrasonic Flaw DetectorDokumen7 halamanDesign and Development of Microcontroller Based Ultrasonic Flaw DetectorBagusElokBelum ada peringkat
- Ultrasonic sensor guideDokumen4 halamanUltrasonic sensor guidecostpopBelum ada peringkat
- Journal Paper FormatDokumen6 halamanJournal Paper FormatPeter Nai HoBelum ada peringkat
- Acoustic Wave Sensors Lecture NotesDokumen27 halamanAcoustic Wave Sensors Lecture NotesNgọc HiểuBelum ada peringkat
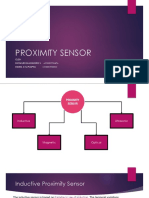
- Proximity Sensor: Oleh: DIOSKURI DANISWORO S. Indira Ayu PuspitaDokumen12 halamanProximity Sensor: Oleh: DIOSKURI DANISWORO S. Indira Ayu PuspitaindiraBelum ada peringkat
- Ultrasonic Detection: Applying Acoustic Vibration Monitoring To Predictive MaintenanceDokumen4 halamanUltrasonic Detection: Applying Acoustic Vibration Monitoring To Predictive MaintenancebingwazzupBelum ada peringkat
- History of Ultrasonics PDFDokumen2 halamanHistory of Ultrasonics PDFatiquegeeBelum ada peringkat
- Project On Ultrasonic Motion SensorDokumen31 halamanProject On Ultrasonic Motion Sensoraarti bhardwajBelum ada peringkat
- Planning RSWDokumen20 halamanPlanning RSWAudrey DiegoBelum ada peringkat
- Motion Sensors Explained: Types, Detection & ApplicationsDokumen17 halamanMotion Sensors Explained: Types, Detection & ApplicationsParth ShahBelum ada peringkat
- Mechatronics Notes22Dokumen23 halamanMechatronics Notes22Arun KumarBelum ada peringkat
- Footboard Travel Alert SystemDokumen40 halamanFootboard Travel Alert SystemSaravanan Viswakarma100% (2)
- Design an Ultrasonic Motion DetectorDokumen13 halamanDesign an Ultrasonic Motion DetectorKatamba RogersBelum ada peringkat
- Ultrasonic Radar Research PaperDokumen6 halamanUltrasonic Radar Research PaperAbhishek KushwahaBelum ada peringkat
- Motion Sensors: BY:Abdulaziz Moosa & Peshkaft Hussein Superviced By: JawahirDokumen20 halamanMotion Sensors: BY:Abdulaziz Moosa & Peshkaft Hussein Superviced By: Jawahirabdulazizmoosa93Belum ada peringkat
- 1 s2.0 S221201731300649X Main PDFDokumen6 halaman1 s2.0 S221201731300649X Main PDFNinBelum ada peringkat
- Ultrasound Condition Monitoring Ue v7 PDFDokumen7 halamanUltrasound Condition Monitoring Ue v7 PDFsergio alejandro baldivieso orozcoBelum ada peringkat
- TB Motion SensorDokumen162 halamanTB Motion SensorTarikuBelum ada peringkat
- Vibration Disturbance Localization Using A 2012 y SergeuiDokumen4 halamanVibration Disturbance Localization Using A 2012 y SergeuiAlfonso GarciaBelum ada peringkat
- Vibration sensor types and applicationsDokumen18 halamanVibration sensor types and applicationsDRathikaBelum ada peringkat
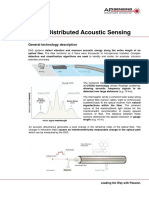
- Flyer - DAS Distributed Acoustic SensingDokumen3 halamanFlyer - DAS Distributed Acoustic SensingsalluahmedBelum ada peringkat
- Distance Measurement of An Object or Obstacle by Ultrasound Sensors Using P89C51RD2Dokumen5 halamanDistance Measurement of An Object or Obstacle by Ultrasound Sensors Using P89C51RD2vijay ARBelum ada peringkat
- Ultrasonic Security SystemsDokumen3 halamanUltrasonic Security SystemsLawrence GraingerBelum ada peringkat
- IRJET V4I1178 With Cover Page v2Dokumen6 halamanIRJET V4I1178 With Cover Page v2Chris Louie YalungBelum ada peringkat
- Radar Biomedical ApplicationsDokumen12 halamanRadar Biomedical ApplicationsAniketBelum ada peringkat
- Vibrating Sensor Device Detects Obstacles for the BlindDokumen35 halamanVibrating Sensor Device Detects Obstacles for the BlindJune Vincent FernandezBelum ada peringkat
- A Single On-Body Antenna As A Sensor For Cardiopulmonary Monitoring FFTDokumen4 halamanA Single On-Body Antenna As A Sensor For Cardiopulmonary Monitoring FFTengrkskBelum ada peringkat
- Ultrasonic Measuring DevicesDokumen15 halamanUltrasonic Measuring DevicesSohail Aziz Ahmad Malik0% (1)
- PI SUCCESS STORY Ultrasonic Piezo Elements Pi1094Dokumen5 halamanPI SUCCESS STORY Ultrasonic Piezo Elements Pi1094Dilshod KhakimovBelum ada peringkat
- Leong 2015Dokumen8 halamanLeong 2015Hamza FerkousBelum ada peringkat
- What Ultrasonic Waves Are, and How They PropagateDokumen17 halamanWhat Ultrasonic Waves Are, and How They PropagateZahir Rayhan JhonBelum ada peringkat
- Ultrasonic SensorDokumen17 halamanUltrasonic Sensorjitenderthakur490Belum ada peringkat
- Ultrasonic SensorTraining MaterialDokumen15 halamanUltrasonic SensorTraining MaterialToan PhamBelum ada peringkat
- Ultrasonic SensorTraining MaterialDokumen15 halamanUltrasonic SensorTraining MaterialToan PhamBelum ada peringkat
- Hauptmann1998 - State of The ArtDokumen17 halamanHauptmann1998 - State of The ArtEdda Andrade RosalesBelum ada peringkat
- Ultrasonic SensorsDokumen19 halamanUltrasonic Sensorskrish0690100% (1)
- Lecture 14 Ultrasound (Additional Slides)Dokumen53 halamanLecture 14 Ultrasound (Additional Slides)fatima ghaniBelum ada peringkat
- Official: Á1005Ñ Acoustic EmissionDokumen4 halamanOfficial: Á1005Ñ Acoustic EmissionDilawar BakhtBelum ada peringkat
- (Chapter 1) Sensor FundamentalDokumen36 halaman(Chapter 1) Sensor FundamentalHatem DheerBelum ada peringkat
- Official: Á1005Ñ Acoustic EmissionDokumen4 halamanOfficial: Á1005Ñ Acoustic EmissionDilawar BakhtBelum ada peringkat
- Ultrasonic SensorDokumen7 halamanUltrasonic SensorCLAS COACHINGBelum ada peringkat
- Project Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariDokumen3 halamanProject Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwarirajatpreetBelum ada peringkat
- Design and Implementation of Control Strategies For A Ball and Beam SystemDokumen8 halamanDesign and Implementation of Control Strategies For A Ball and Beam SystemClaudia LuqueBelum ada peringkat
- A New Diagnostic Tool For Detecting Dental Caries and Tooth Wear: Ultrasonic SystemDokumen4 halamanA New Diagnostic Tool For Detecting Dental Caries and Tooth Wear: Ultrasonic SystempoojaBelum ada peringkat
- Sensors and ActuatorsDokumen27 halamanSensors and ActuatorsLabhansh AgrawalBelum ada peringkat
- IOT Project POSTERDokumen1 halamanIOT Project POSTERFemilBelum ada peringkat
- Arduino Based RADAR System ProjectDokumen14 halamanArduino Based RADAR System ProjectVijay50% (2)
- This Ain't Your Dose: Sensor Spoofing Attack On Medical Infusion PumpDokumen11 halamanThis Ain't Your Dose: Sensor Spoofing Attack On Medical Infusion PumpGuilherme PagatiniBelum ada peringkat
- Ultrasonics (Journal) : Ultrasound Is An OscillatingDokumen2 halamanUltrasonics (Journal) : Ultrasound Is An OscillatingKelly BeardBelum ada peringkat
- Textbook of Urgent Care Management: Chapter 35, Urgent Care Imaging and InterpretationDari EverandTextbook of Urgent Care Management: Chapter 35, Urgent Care Imaging and InterpretationBelum ada peringkat
- Costs of Storing and Transporting HydrogenDokumen216 halamanCosts of Storing and Transporting Hydrogenknoxd77Belum ada peringkat
- The Impact of Friction Factor Correlations on Gas Pipeline Flow Rate PredictionsDokumen8 halamanThe Impact of Friction Factor Correlations on Gas Pipeline Flow Rate PredictionsagarwaldivyangBelum ada peringkat
- Matter Definition & The Five States of MatterDokumen2 halamanMatter Definition & The Five States of MatterAceeBelum ada peringkat
- TSC Fire Guide (Web) PDFDokumen52 halamanTSC Fire Guide (Web) PDFJillF.RussellBelum ada peringkat
- Metal Powder TechnologyDokumen8 halamanMetal Powder TechnologyVenkateswaran Krishnamurthy100% (1)
- High School Chemistry PDFDokumen12 halamanHigh School Chemistry PDFAleph ContinuumBelum ada peringkat
- Dew Point CorrosionDokumen26 halamanDew Point CorrosionNaren C100% (2)
- Hazards of Petroleum: FlammabilityDokumen33 halamanHazards of Petroleum: FlammabilitySIDDHARTH MOHANTY100% (1)
- Heat and Mass Transfer in Spray Drying.Dokumen188 halamanHeat and Mass Transfer in Spray Drying.Sorica Cristian100% (1)
- Fired HeaterDokumen77 halamanFired HeaterEslamSheblBelum ada peringkat
- Beltomatic Operator's ManualDokumen285 halamanBeltomatic Operator's ManualOrbán ÁrpádBelum ada peringkat
- Introduction To DGSDokumen58 halamanIntroduction To DGSAan Sarkasi AmdBelum ada peringkat
- Hcu Physics Entrance 2015 Feb 11-Physicskerala PDFDokumen20 halamanHcu Physics Entrance 2015 Feb 11-Physicskerala PDFSiddharth PalBelum ada peringkat
- Sizing of RG FilterDokumen4 halamanSizing of RG FilterMauricioBelum ada peringkat
- Transformer Fluid - A Powerful Tool For The Life Management of An Ageing Transformer Population UMIDADE-2001 - A - Powerful - ToolDokumen16 halamanTransformer Fluid - A Powerful Tool For The Life Management of An Ageing Transformer Population UMIDADE-2001 - A - Powerful - Toollbk50Belum ada peringkat
- Zantingh Burner SystemsDokumen5 halamanZantingh Burner SystemsSandro RuizBelum ada peringkat
- 2009 three-phase SGD/W20Y-11X SF6 recovery manualDokumen16 halaman2009 three-phase SGD/W20Y-11X SF6 recovery manualfd27Belum ada peringkat
- Thermodynamics Project: TOPIC: Fugacity of Pure SubstancesDokumen6 halamanThermodynamics Project: TOPIC: Fugacity of Pure SubstancesRaman K. BediBelum ada peringkat
- Jan 11Dokumen66 halamanJan 11c_nghia100% (2)
- One GPL GBDokumen35 halamanOne GPL GBRadu DobreBelum ada peringkat
- Gas Well IPR PDFDokumen28 halamanGas Well IPR PDFReza ShamsBelum ada peringkat
- Paramagnetic Oxygen SensorDokumen5 halamanParamagnetic Oxygen SensorSalamah ambar100% (1)
- PVT AnalysisDokumen41 halamanPVT AnalysisEmad Aamer100% (2)
- Astm D4057 22Dokumen13 halamanAstm D4057 22JOSEBelum ada peringkat
- Safe Handling of Gas Cylinders: Pocket Safety Guide No. 2Dokumen8 halamanSafe Handling of Gas Cylinders: Pocket Safety Guide No. 2Suresh ThevanindrianBelum ada peringkat
- API Chapter 8.1 - ASTM D4057-22 - Standard Practice For Manual Sampling of Petroleum and Petroleum ProductsDokumen49 halamanAPI Chapter 8.1 - ASTM D4057-22 - Standard Practice For Manual Sampling of Petroleum and Petroleum ProductsGrimaldo Edison Farfan LópezBelum ada peringkat
- Skin in Petroleum EngineeringDokumen4 halamanSkin in Petroleum EngineeringRavel AlviandoBelum ada peringkat
- Emerson CEMSDokumen12 halamanEmerson CEMSquinteroudinaBelum ada peringkat
- Study of Gas and Study GuideDokumen6 halamanStudy of Gas and Study GuideMarc OdermattBelum ada peringkat
- DPP (1 TO) 13th PHYDokumen37 halamanDPP (1 TO) 13th PHYRaju SinghBelum ada peringkat