Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- JUNE 2022 Surplus Record Machinery & Equipment DirectoryDokumen718 halamanJUNE 2022 Surplus Record Machinery & Equipment DirectorySurplus Record100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- John Deere 322, 330, 332, 430 Manual PDFDokumen566 halamanJohn Deere 322, 330, 332, 430 Manual PDFPaul Bronco50% (2)
- Manual SpoolerDokumen118 halamanManual Spooleryubelly gómezBelum ada peringkat
- WEMPEC Celebrates 35 Years of Collaboration and InnovationDokumen52 halamanWEMPEC Celebrates 35 Years of Collaboration and Innovationshyam_iitbBelum ada peringkat
- Coding Guidelines For MESC and Spare Parts PDFDokumen9 halamanCoding Guidelines For MESC and Spare Parts PDFParthiban R100% (3)
- KATO HD2310-3 Excavator Workshop Manual PDFDokumen232 halamanKATO HD2310-3 Excavator Workshop Manual PDFBaciu Nicolae93% (15)
- Nextion Instruction Set - ITEAD WikiDokumen28 halamanNextion Instruction Set - ITEAD WikiErdem Koklu100% (1)
- CBLM On Using Farm Tools and EquipmentDokumen48 halamanCBLM On Using Farm Tools and EquipmentJohn James75% (4)
- Marine BoilersDokumen29 halamanMarine BoilersAshish YadavBelum ada peringkat
- Mechanical Engineering ReviewerDokumen13 halamanMechanical Engineering ReviewerAllen Reyes100% (1)
- V-40MMachine Instruction ManualDokumen59 halamanV-40MMachine Instruction Manualsunhuynh100% (1)
- SDLG 2015 Product ManualDokumen185 halamanSDLG 2015 Product Manualeleuterio100% (4)
- CIA RDP86 00513R000826010015 8 - CompressedDokumen100 halamanCIA RDP86 00513R000826010015 8 - CompressedErdem KokluBelum ada peringkat
- Genelkatalog PDFDokumen32 halamanGenelkatalog PDFErdem KokluBelum ada peringkat
- Post GcodeDokumen7 halamanPost GcodeErdem KokluBelum ada peringkat
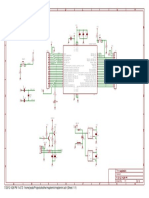
- Maplemini PDFDokumen1 halamanMaplemini PDFErdem KokluBelum ada peringkat
- Sivamagcode 3Dokumen2 halamanSivamagcode 3Erdem KokluBelum ada peringkat
- El Fali (Azize Uyqun)Dokumen19 halamanEl Fali (Azize Uyqun)Erdem KokluBelum ada peringkat
- FanucgcodeDokumen7 halamanFanucgcodeErdem KokluBelum ada peringkat
- Tekpa Banka Iban NumaralariDokumen1 halamanTekpa Banka Iban NumaralariErdem KokluBelum ada peringkat
- Mach 3 GcodyenDokumen7 halamanMach 3 GcodyenErdem KokluBelum ada peringkat
- Mach 3 GcodyenDokumen7 halamanMach 3 GcodyenErdem KokluBelum ada peringkat
- Recommended Dealer Sales Prices and Motorcycle Models with KDV RatesDokumen1 halamanRecommended Dealer Sales Prices and Motorcycle Models with KDV RatesErdem KokluBelum ada peringkat
- READMEDokumen1 halamanREADMEErdem KokluBelum ada peringkat
- File 2019 10 10Dokumen1 halamanFile 2019 10 10Erdem KokluBelum ada peringkat
- Post GcodeDokumen2 halamanPost GcodeErdem KokluBelum ada peringkat
- A4988 Stepper Motor Driver Carrier, Black EditionDokumen5 halamanA4988 Stepper Motor Driver Carrier, Black EditionRadersBelum ada peringkat
- Refresh Field List in My Case Am Looking at The Xtrareports For A Web ApplicationDokumen1 halamanRefresh Field List in My Case Am Looking at The Xtrareports For A Web ApplicationErdem KokluBelum ada peringkat
- Mach 3 GcodyenDokumen7 halamanMach 3 GcodyenErdem KokluBelum ada peringkat
- El Fali (Azize Uyqun)Dokumen19 halamanEl Fali (Azize Uyqun)Erdem KokluBelum ada peringkat
- SivamagcodeyenDokumen7 halamanSivamagcodeyenErdem KokluBelum ada peringkat
- Stm32f446ret6 PDFDokumen202 halamanStm32f446ret6 PDFNguyen Trong NghiaBelum ada peringkat
- Mach 3 GcodyenihiDokumen7 halamanMach 3 GcodyenihiErdem KokluBelum ada peringkat
- Mach 3 GcodyeniDokumen7 halamanMach 3 GcodyeniErdem KokluBelum ada peringkat
- AbstractDokumen1 halamanAbstractnamhoa02Belum ada peringkat
- Mach 3 GcodyeniDokumen7 halamanMach 3 GcodyeniErdem KokluBelum ada peringkat
- Sivamagcode 2Dokumen2 halamanSivamagcode 2Erdem KokluBelum ada peringkat
- En DM00046982 PDFDokumen260 halamanEn DM00046982 PDFErdem KokluBelum ada peringkat
- Sivamagcode 3Dokumen2 halamanSivamagcode 3Erdem KokluBelum ada peringkat
- Mach 3 GcodyeniDokumen7 halamanMach 3 GcodyeniErdem KokluBelum ada peringkat
- Sivamagcode 1Dokumen2 halamanSivamagcode 1Erdem KokluBelum ada peringkat
- Ricoh C430 - C431 Service ManualDokumen790 halamanRicoh C430 - C431 Service ManualMarco DelsaltoBelum ada peringkat
- Soft Robotics: A Perspective-Current Trends and Prospects For The FutureDokumen8 halamanSoft Robotics: A Perspective-Current Trends and Prospects For The FutureSamsonBelum ada peringkat
- Compare - Contrast EssayDokumen3 halamanCompare - Contrast Essayapi-509983842Belum ada peringkat
- Terms CompilationDokumen9 halamanTerms CompilationKring KringBelum ada peringkat
- SKF Vibracon BrochureDokumen4 halamanSKF Vibracon BrochureMo ZeidBelum ada peringkat
- Essay (Article) About Uk Inventions in The Mexican ContextDokumen22 halamanEssay (Article) About Uk Inventions in The Mexican ContextJoel RezaBelum ada peringkat
- Ultrasonic TestingDokumen14 halamanUltrasonic TestingshasvinaBelum ada peringkat
- Agro Power: Application GuideDokumen486 halamanAgro Power: Application GuideMiguel Alexis Posso ZuñigaBelum ada peringkat
- RICOH MPC2030 Service ManualDokumen832 halamanRICOH MPC2030 Service Manualkingveli100% (4)
- Time TableDokumen29 halamanTime TableTijo ThomasBelum ada peringkat
- Tecnodue PT250 User ManualDokumen36 halamanTecnodue PT250 User ManualVesna Fišćan Vukašinović100% (1)
- Visumatic CatalogDokumen17 halamanVisumatic CatalogRoy AyalaBelum ada peringkat
- Pneumatic Bearing PullerDokumen4 halamanPneumatic Bearing PullerMANIKANDAN B100% (1)
- AGMA Limits: After Hours EmergencyDokumen2 halamanAGMA Limits: After Hours Emergencyknsvel2000Belum ada peringkat
- SHL Assessment-SyllabusDokumen9 halamanSHL Assessment-Syllabusswethavarghese241198Belum ada peringkat
- The Instruction Manual For Automatic Molding Machine and Warranty CardDokumen21 halamanThe Instruction Manual For Automatic Molding Machine and Warranty CardMohammad FaroukBelum ada peringkat
- Senior Project - Final ReportDokumen80 halamanSenior Project - Final ReportJennBelum ada peringkat
- Engineering Mechanics (PDF Library)Dokumen4 halamanEngineering Mechanics (PDF Library)shishunalBelum ada peringkat
- Philippine Agricultural Engineering Standard Paes 208:2000Dokumen8 halamanPhilippine Agricultural Engineering Standard Paes 208:2000Mario Labitad Anore Jr.Belum ada peringkat