Anda mungkin juga menyukai
- Ebook Aerofotogrametria Com Drones HorusDokumen22 halamanEbook Aerofotogrametria Com Drones Horussaviodebrito100% (1)
- Ebook Aerofotogrametria Com Drones HorusDokumen25 halamanEbook Aerofotogrametria Com Drones HorusShaier DornelesBelum ada peringkat
- Curso Drone Na AgriculturaDokumen470 halamanCurso Drone Na AgriculturaEngenharia Elétrica100% (2)
- Ebook Topografia Com Drones para Iniciantes PDFDokumen19 halamanEbook Topografia Com Drones para Iniciantes PDFJoão Paulo Lima100% (3)
- eBook-Topografia Com DronesDokumen23 halamaneBook-Topografia Com DronesJeran100% (1)
- DronEng - Material de Apoio - Topografia Com Drones (Ambiente Urbano)Dokumen37 halamanDronEng - Material de Apoio - Topografia Com Drones (Ambiente Urbano)SimonMarcoBelum ada peringkat
- Aerofotogrametria com DronesDokumen22 halamanAerofotogrametria com DronesAnonymous DatyydZp2Belum ada peringkat
- Mapa com drones: guia passo a passoDokumen47 halamanMapa com drones: guia passo a passocleytonricardoBelum ada peringkat
- Curso de Drone - QuantumDokumen5 halamanCurso de Drone - QuantumEdmilson Lima Júnior100% (1)
- Câmera para Drone: Conheça Os 3 Principais Tipos ExistentesDokumen11 halamanCâmera para Drone: Conheça Os 3 Principais Tipos ExistentesAdenilson GiovaniniBelum ada peringkat
- Publicacao - DRONES 20161130 20012017 WebDokumen92 halamanPublicacao - DRONES 20161130 20012017 WebALEXANDRE JOSE FIGUEIREDO LOUREIRO100% (2)
- Drones na agriculturaDokumen26 halamanDrones na agriculturaRudimar PetterBelum ada peringkat
- Drones Decole Uma Nova CarreiraDokumen155 halamanDrones Decole Uma Nova Carreiraleantav100% (1)
- O guia definitivo sobre pontos de apoio para mapeamento aéreoDokumen23 halamanO guia definitivo sobre pontos de apoio para mapeamento aéreoFranco BaldiBelum ada peringkat
- Inspeção de tanques com dronesDokumen50 halamanInspeção de tanques com dronesCarlos Henrique Araújo Norte100% (1)
- Inspeção Por DronesDokumen32 halamanInspeção Por DronesPriscila Pereira100% (1)
- Ebook Guia Pratico HorusDokumen24 halamanEbook Guia Pratico HorusRicardo Vilar Neves100% (1)
- Mapeamento com DronesDokumen41 halamanMapeamento com DronesCamila MB100% (1)
- Drone Segurança Voo InicianteDokumen18 halamanDrone Segurança Voo InicianteJean Dionízio100% (2)
- Apresentação Curso de DronesDokumen24 halamanApresentação Curso de DronesDanilo Yamazaki67% (3)
- Material de Apoio - Agisoft Photoscan Pro PDFDokumen31 halamanMaterial de Apoio - Agisoft Photoscan Pro PDFrezende.dbrBelum ada peringkat
- Curso de pilotos de drones de pulverizaçãoDokumen38 halamanCurso de pilotos de drones de pulverizaçãoFernando TuraniBelum ada peringkat
- Senar - Agricultura de Precisão - Drones PDFDokumen88 halamanSenar - Agricultura de Precisão - Drones PDFHenrique LehrbachBelum ada peringkat
- Cartilha SENARDokumen84 halamanCartilha SENARBruno CarlosBelum ada peringkat
- Uso de drones na agricultura de precisãoDokumen11 halamanUso de drones na agricultura de precisãoMaycon VieiraBelum ada peringkat
- Resolução Espectral Na Utilização de Drones?Dokumen10 halamanResolução Espectral Na Utilização de Drones?Adenilson GiovaniniBelum ada peringkat
- Aplicação Do Drone Na Engenharia de Agrimensura e para o Georreferenciamento de Imóveis Rurais Abordagem Histórico Legal No BrasilDokumen41 halamanAplicação Do Drone Na Engenharia de Agrimensura e para o Georreferenciamento de Imóveis Rurais Abordagem Histórico Legal No BrasilrufuelBelum ada peringkat
- Levantamento Aerofotogramétrico: o Guia Definitivo Sobre o Assunto!Dokumen20 halamanLevantamento Aerofotogramétrico: o Guia Definitivo Sobre o Assunto!Adenilson GiovaniniBelum ada peringkat
- Operador de DroneDokumen121 halamanOperador de DroneParente36Belum ada peringkat
- Drone na faunaDokumen50 halamanDrone na faunaDennis Panayotis Ostrensky Saridakis100% (3)
- Drone Na Construção CivilDokumen15 halamanDrone Na Construção CivilIvanil RibeiroBelum ada peringkat
- Drones e Ciencia Prudkin & Breunig 2019Dokumen126 halamanDrones e Ciencia Prudkin & Breunig 2019Marcos PalaciosBelum ada peringkat
- Modelagem de DroneDokumen32 halamanModelagem de DroneEwerton Cristhian100% (1)
- Mapeamento topográfico com dronesDokumen53 halamanMapeamento topográfico com dronesMarco AguiarBelum ada peringkat
- Topografia Com Drones: Conheça As 7 EtapasDokumen11 halamanTopografia Com Drones: Conheça As 7 EtapasAdenilson GiovaniniBelum ada peringkat
- CASE TÉCNICO: X TOPOGRAFIA E FOTOGRAMETRIADokumen37 halamanCASE TÉCNICO: X TOPOGRAFIA E FOTOGRAMETRIAsaviodebritoBelum ada peringkat
- Avaliação do uso de drones em levantamentos planialtimétricos para projetos de terraplenagemDokumen12 halamanAvaliação do uso de drones em levantamentos planialtimétricos para projetos de terraplenagemDavid BergensBelum ada peringkat
- Historia Da FotoGraMeTriaDokumen35 halamanHistoria Da FotoGraMeTriaRodryBelum ada peringkat
- Academia de Pilotagem de DronesDokumen28 halamanAcademia de Pilotagem de DronesAdriano CHAVES DE FRANÇABelum ada peringkat
- Ortofotocarta, Cartas e Plantas Oriundas Do Mapeamento Com DroneDokumen12 halamanOrtofotocarta, Cartas e Plantas Oriundas Do Mapeamento Com DroneAdenilson GiovaniniBelum ada peringkat
- Introdução à TopografiaDokumen59 halamanIntrodução à TopografiaFernanda BreijãoBelum ada peringkat
- Restituição Fotogramétrica: Pontos de ApoioDokumen21 halamanRestituição Fotogramétrica: Pontos de ApoioHewerton Alves da SilvaBelum ada peringkat
- Manual MetashapeDokumen25 halamanManual MetashapeRobson FerreiraBelum ada peringkat
- Apostila Curso de Drone V3.0Dokumen91 halamanApostila Curso de Drone V3.0Principe OicramBelum ada peringkat
- Manual de operação Estação Total RTS-820R3Dokumen204 halamanManual de operação Estação Total RTS-820R3John Dias100% (2)
- Manual Drone 40Dokumen16 halamanManual Drone 40Fernando TuraniBelum ada peringkat
- TopconTools PortuguêsDokumen232 halamanTopconTools Portuguêsanon_182633121Belum ada peringkat
- DronesDokumen84 halamanDronesElbow Ta100% (1)
- Apostila Guia Pratico de DronesDokumen54 halamanApostila Guia Pratico de DronesMelvin LeisnerBelum ada peringkat
- ChecklistDrone Pre Voo ABDDokumen2 halamanChecklistDrone Pre Voo ABDRobson GomesBelum ada peringkat
- E Book Curso Drones OnlineDokumen132 halamanE Book Curso Drones OnlineCamila MBBelum ada peringkat
- Dji Go 4 Manual PortuguesDokumen43 halamanDji Go 4 Manual PortuguesMoacyr Salles Neto0% (2)
- Processamento de Imagens No Agisoft MetashapeDokumen46 halamanProcessamento de Imagens No Agisoft MetashapeJoao Pedro Souza100% (2)
- Drone checklistDokumen2 halamanDrone checklistmarlon santosBelum ada peringkat
- Cartilha de DronesDokumen6 halamanCartilha de DronesPauloFerreiraBelum ada peringkat
- Processamento de imagens aéreas no PhotoScanDokumen22 halamanProcessamento de imagens aéreas no PhotoScanjessecad100% (1)
- O GUIA DEFINITIVO SOBRE PONTOS DE APOIODokumen23 halamanO GUIA DEFINITIVO SOBRE PONTOS DE APOIOCarlos Eduardo MoreiraBelum ada peringkat
- O Senhor é o meu PastorDokumen1 halamanO Senhor é o meu PastoredielsomBelum ada peringkat
- SKYRC Quattro B6AC Instruction Manual - En.ptDokumen28 halamanSKYRC Quattro B6AC Instruction Manual - En.ptedielsomBelum ada peringkat
- ASDDASDFZXCDokumen1 halamanASDDASDFZXCedielsomBelum ada peringkat
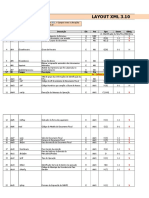
- Layout 310Dokumen76 halamanLayout 310edielsomBelum ada peringkat
- Layout 310Dokumen76 halamanLayout 310edielsomBelum ada peringkat
- Resumo Historia de Mato GrossoDokumen8 halamanResumo Historia de Mato Grossomarzackoliver100% (2)
- Layout 310Dokumen76 halamanLayout 310edielsomBelum ada peringkat
- Conexao Windev Mobile Com SqlServer Por ODBCDokumen6 halamanConexao Windev Mobile Com SqlServer Por ODBCedielsomBelum ada peringkat
- Layout 310Dokumen76 halamanLayout 310edielsomBelum ada peringkat
- Biscoitinho de CocoDokumen3 halamanBiscoitinho de CocoedielsomBelum ada peringkat
- Autocad Correlação Comandos Porguês InglêsDokumen7 halamanAutocad Correlação Comandos Porguês InglêsJosé MelloBelum ada peringkat
- DocumentoDokumen1 halamanDocumentoedielsomBelum ada peringkat
- DocumentoDokumen1 halamanDocumentoedielsomBelum ada peringkat
- DocumentoDokumen1 halamanDocumentoedielsomBelum ada peringkat
- InstalaçãoDokumen1 halamanInstalaçãoedielsomBelum ada peringkat
- Cifra Club - LAYLA - Eric ClaptonDokumen8 halamanCifra Club - LAYLA - Eric ClaptonFelipe GenuínoBelum ada peringkat
- 16 Eec-ViDokumen7 halaman16 Eec-ViThyago OliveiraBelum ada peringkat
- Planilha de Controle de Arquivo Morto 4.0 - DeMODokumen231 halamanPlanilha de Controle de Arquivo Morto 4.0 - DeMOAndriw Kevin Ramos da Silva - ALMOXARIFADOBelum ada peringkat
- Roteiro de estudos para estruturas de concreto armadoDokumen7 halamanRoteiro de estudos para estruturas de concreto armadoRobertoBelum ada peringkat
- Serviços Arquitetura 80m2Dokumen2 halamanServiços Arquitetura 80m2Jhonnyguilherme LisboaBelum ada peringkat
- Parametrização VEGAPULS 62-63-68Dokumen29 halamanParametrização VEGAPULS 62-63-68wagner machado de moraesBelum ada peringkat
- Dimbo Linha - Leve - 2018Dokumen40 halamanDimbo Linha - Leve - 2018gasodiesel gasodieselBelum ada peringkat
- Finanças Pessoais para IniciantesDokumen120 halamanFinanças Pessoais para IniciantesJualdino D'hival100% (1)
- Como criar um script de atendimento ao clienteDokumen13 halamanComo criar um script de atendimento ao clienteGraziele de Souza Medeiros100% (1)
- Ebook Execucao Trabalhista Na Pratica - ATUALIZADO - 08-09-2020Dokumen225 halamanEbook Execucao Trabalhista Na Pratica - ATUALIZADO - 08-09-2020Manuelly Gomes SoaresBelum ada peringkat
- AOCPDokumen251 halamanAOCPPedro OliveiraBelum ada peringkat
- Direitos autorais Guirlanda Urso MarinheiroDokumen19 halamanDireitos autorais Guirlanda Urso MarinheiroDenise RodriguesBelum ada peringkat
- 10 Mil No Primeiro Mês de MKD.Dokumen70 halaman10 Mil No Primeiro Mês de MKD.Leticia AlmeidaBelum ada peringkat
- A Estratégia de Internacionalização Da Natura - Análise Pela Óptica Da Vantagem CompetitivaDokumen16 halamanA Estratégia de Internacionalização Da Natura - Análise Pela Óptica Da Vantagem CompetitivaGabrielle MendonçaBelum ada peringkat
- NBR17505-2 - Arquivo para Impressão PDFDokumen75 halamanNBR17505-2 - Arquivo para Impressão PDFAndre Soares de Castro63% (8)
- Direito de Propriedade, Família e SucessõesDokumen300 halamanDireito de Propriedade, Família e SucessõesThiago Laurindo 2Belum ada peringkat
- TEEB - Abordagens, Conclusões e RecomendaçõesDokumen51 halamanTEEB - Abordagens, Conclusões e Recomendaçõesmjc1980Belum ada peringkat
- Dossiê Técnico - Fabricação de SabãoDokumen30 halamanDossiê Técnico - Fabricação de SabãoMariana MeirelesBelum ada peringkat
- Atendimento de acidentes de trânsitoDokumen41 halamanAtendimento de acidentes de trânsitolamouniermeloBelum ada peringkat
- Sistema de Producao 2022 - FinalDokumen46 halamanSistema de Producao 2022 - FinalZaca SchweppesBelum ada peringkat
- O Milagre Da Manhã - Hal ElrodDokumen5 halamanO Milagre Da Manhã - Hal ElrodDom GuterresBelum ada peringkat
- NBR-14565 Cabeamento Estruturado PDFDokumen67 halamanNBR-14565 Cabeamento Estruturado PDFlucioricardoamaralBelum ada peringkat
- Fundamentos Históricos Da Educação - OKDokumen3 halamanFundamentos Históricos Da Educação - OKJoão CamposBelum ada peringkat
- Reologia Senai Aula - 01Dokumen27 halamanReologia Senai Aula - 01Harison SantosBelum ada peringkat
- Nestle Com Voce #31Dokumen35 halamanNestle Com Voce #31Pedro SouzaBelum ada peringkat
- Exercício ImpairmentDokumen2 halamanExercício ImpairmentVictória Gemaque100% (1)
- RTY - Rolled - Throughput - Yield PDFDokumen11 halamanRTY - Rolled - Throughput - Yield PDF102540Belum ada peringkat
- Edital Final Medicina 20242cp - 240207 - 105104Dokumen48 halamanEdital Final Medicina 20242cp - 240207 - 105104Maria luiza MeloBelum ada peringkat
- Der PRDokumen9 halamanDer PRCynthyaBelum ada peringkat
- Apostila de Gerenciamento de Equipes - Completa PDFDokumen70 halamanApostila de Gerenciamento de Equipes - Completa PDFRichard SousaBelum ada peringkat