Anda mungkin juga menyukai
- Laplace Transforms EssentialsDari EverandLaplace Transforms EssentialsPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- Applied Sciences: Equivalence Between Fuzzy PID Controllers and Conventional PID ControllersDokumen12 halamanApplied Sciences: Equivalence Between Fuzzy PID Controllers and Conventional PID ControllersxXElcaXxBelum ada peringkat
- InTech-Robot Control by Fuzzy LogicDokumen22 halamanInTech-Robot Control by Fuzzy LogicNguyễn Hoàng Xuân DuyBelum ada peringkat
- Fast Fourier Transform - Paul Bourke (1993)Dokumen16 halamanFast Fourier Transform - Paul Bourke (1993)Phat Luong100% (1)
- Methods For Automated Design For Singleton Fuzzy Logic ControllerDokumen5 halamanMethods For Automated Design For Singleton Fuzzy Logic ControllerShreyansh ShahBelum ada peringkat
- Performance Fuzzy PDFDokumen4 halamanPerformance Fuzzy PDFabdelgoui rymBelum ada peringkat
- On A Class of Observer-Based Fault Diagnosis Schemes Under Closed-Loop Control: Performance Evaluation and ImprovementDokumen14 halamanOn A Class of Observer-Based Fault Diagnosis Schemes Under Closed-Loop Control: Performance Evaluation and ImprovementFatiha HAMDIBelum ada peringkat
- Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, KanpurDokumen17 halamanIntelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, KanpurGrigore DanielBelum ada peringkat
- Implementation of FFT by Using Matlab: Simulink On Xilinx Virtex-4 Fpgas: Performance of A Paired Transform Based FFTDokumen7 halamanImplementation of FFT by Using Matlab: Simulink On Xilinx Virtex-4 Fpgas: Performance of A Paired Transform Based FFTKevin McintoshBelum ada peringkat
- Adaptive Reduced-Order Control of Discrete Repetitive Processes With Iteration-Varying Reference SignalsDokumen6 halamanAdaptive Reduced-Order Control of Discrete Repetitive Processes With Iteration-Varying Reference Signalssharifabd omarBelum ada peringkat
- Digital Signal & Image Processing B Option - 8 Lectures: Stephen Roberts Sjrob@robots - Ox.ac - UkDokumen172 halamanDigital Signal & Image Processing B Option - 8 Lectures: Stephen Roberts Sjrob@robots - Ox.ac - UkDotressus MmokBelum ada peringkat
- L-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlDokumen10 halamanL-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlRaymond EsmeraldaBelum ada peringkat
- ReportDokumen16 halamanReportDuy TrầnBelum ada peringkat
- A New Methodology For Designing A Fuzzy Logic Controller and PI, PD Blending MechanismDokumen14 halamanA New Methodology For Designing A Fuzzy Logic Controller and PI, PD Blending MechanismselvamBelum ada peringkat
- Real - Time DC Motor Position Control by (FPID) Controllers and Design (FLC) Using Labview Software SimulationDokumen10 halamanReal - Time DC Motor Position Control by (FPID) Controllers and Design (FLC) Using Labview Software SimulationmadanesherBelum ada peringkat
- Katholieke Universiteit Leuven, E.E. Dept., Kasteelpark Arenberg 10, B-3001 Heverlee, Belgium Email: (Deepaknath - Tandur, Marc - Moonen) @esat - Kuleuven.beDokumen4 halamanKatholieke Universiteit Leuven, E.E. Dept., Kasteelpark Arenberg 10, B-3001 Heverlee, Belgium Email: (Deepaknath - Tandur, Marc - Moonen) @esat - Kuleuven.beSoumitra BhowmickBelum ada peringkat
- RK4 MethodDokumen6 halamanRK4 MethodfurqanhamidBelum ada peringkat
- 10 1 1 50Dokumen6 halaman10 1 1 50Alex KayrinBelum ada peringkat
- PID ControllerDokumen4 halamanPID ControllerHammad KhanBelum ada peringkat
- Hybrid ITLBO-DE Optimized Fuzzy PI Controller For Multi-Area Automatic Generation Control With Generation Rate ConstraintDokumen9 halamanHybrid ITLBO-DE Optimized Fuzzy PI Controller For Multi-Area Automatic Generation Control With Generation Rate ConstraintAuroBelum ada peringkat
- Hybrid Fuzzy Logic PID Controller: July 1994Dokumen13 halamanHybrid Fuzzy Logic PID Controller: July 1994Jhonatan GutierrezBelum ada peringkat
- 3 Sampling PDFDokumen20 halaman3 Sampling PDFWaqas QammarBelum ada peringkat
- Eeb 252Dokumen2 halamanEeb 252Vivek SharmaBelum ada peringkat
- Exp7 WatermarkDokumen8 halamanExp7 Watermarkraneraji123Belum ada peringkat
- Spectral, Phase, and Transient Equalization For Audio SystemsDokumen6 halamanSpectral, Phase, and Transient Equalization For Audio Systemsdonald141Belum ada peringkat
- CORDIC Based Implementation of Fast Fourier Transform: - CORDIC Is An Iterative Arithmetic ComputingDokumen6 halamanCORDIC Based Implementation of Fast Fourier Transform: - CORDIC Is An Iterative Arithmetic ComputingKaushik DasBelum ada peringkat
- Lecture 6 - Laplace TransformDokumen7 halamanLecture 6 - Laplace TransformSujeet SharmaBelum ada peringkat
- Transfer FunctionDokumen16 halamanTransfer FunctionAnonymous 0zrCNQBelum ada peringkat
- The Fractional Fourier Transform and Application1Dokumen7 halamanThe Fractional Fourier Transform and Application1ceroja_chanBelum ada peringkat
- FPGA Implementation of A Sequential Extended Kalman Filter Algorithm Applied To Mobile Robotics Localization ProblemDokumen4 halamanFPGA Implementation of A Sequential Extended Kalman Filter Algorithm Applied To Mobile Robotics Localization ProblemCarlos Humberto LlanosBelum ada peringkat
- Ifac2012 Working With Time-Delay Systems in MATLAB Suat GumussoyDokumen6 halamanIfac2012 Working With Time-Delay Systems in MATLAB Suat GumussoyBouazizi HechmiBelum ada peringkat
- November Lecture 6 Takagi SugenoDokumen114 halamanNovember Lecture 6 Takagi SugenoJ TBelum ada peringkat
- Dynopt - Dynamic Optimisation Code For Matlab: Fikar/research/dynopt/dynopt - HTMDokumen12 halamanDynopt - Dynamic Optimisation Code For Matlab: Fikar/research/dynopt/dynopt - HTMdhavalakkBelum ada peringkat
- Signal ProjectDokumen15 halamanSignal ProjectMalikAlrahabiBelum ada peringkat
- Internal Model Principle For Discrete Repetitive ProcessesDokumen6 halamanInternal Model Principle For Discrete Repetitive Processessharifabd omarBelum ada peringkat
- %CLC %clear All: 'DFT' 'K' 'X (K) 'Dokumen4 halaman%CLC %clear All: 'DFT' 'K' 'X (K) '22bec032Belum ada peringkat
- Water Bath Temperature Control by A Recurrent Fuzzy Controller and Its FPGA ImplementationDokumen9 halamanWater Bath Temperature Control by A Recurrent Fuzzy Controller and Its FPGA ImplementationGanesh Kumar ArumugamBelum ada peringkat
- A Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsDokumen23 halamanA Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsAntmel Rodriguez CabralBelum ada peringkat
- B.Tech Final Thesis From Ab-Strack FinalDokumen47 halamanB.Tech Final Thesis From Ab-Strack FinalTapasyaBelum ada peringkat
- Ece V Digital Signal Processing (10ec52) NotesDokumen160 halamanEce V Digital Signal Processing (10ec52) NotesVijay SaiBelum ada peringkat
- Fuzzy: Design and Analysis of A Fuzzy Proportional-Integral-Derivative ControllerDokumen18 halamanFuzzy: Design and Analysis of A Fuzzy Proportional-Integral-Derivative ControllerDaniel ThomasBelum ada peringkat
- 4 Microsoft Word - L-12 - SS - IA - C - EE - NPTELDokumen10 halaman4 Microsoft Word - L-12 - SS - IA - C - EE - NPTELRicky RawBelum ada peringkat
- Controller Design For A Twin Rotor Helicopter Model Via Exact State Feedback LinearizationDokumen6 halamanController Design For A Twin Rotor Helicopter Model Via Exact State Feedback LinearizationSaurabh SharmaBelum ada peringkat
- Annals of MathematicsDokumen42 halamanAnnals of MathematicsKauê SenaBelum ada peringkat
- ECS 455: Mobile Communications Fourier Transform and Communication SystemsDokumen25 halamanECS 455: Mobile Communications Fourier Transform and Communication SystemsJeevan BasnyatBelum ada peringkat
- System Identification Using Laguerre Functions: Simple ExamplesDokumen6 halamanSystem Identification Using Laguerre Functions: Simple Examplessadeghnzr2220Belum ada peringkat
- FI 02-Merged PDFDokumen218 halamanFI 02-Merged PDFCBelum ada peringkat
- EC8553 2marksDokumen20 halamanEC8553 2marksSBelum ada peringkat
- Self-Tuning Control Matlab Toolbox - Memodology and DesignDokumen6 halamanSelf-Tuning Control Matlab Toolbox - Memodology and DesignMohsinBelum ada peringkat
- A Digital Kalman Filter For Radar Tracking With Filter Gains Independent of Sampling Interval Shi VaprasadDokumen13 halamanA Digital Kalman Filter For Radar Tracking With Filter Gains Independent of Sampling Interval Shi VaprasadShrayan DuttaBelum ada peringkat
- e-ISSN: 2320-0847 p-ISSN: 2320-0936 Volume-02, Issue-12, pp-75-82Dokumen8 halamane-ISSN: 2320-0847 p-ISSN: 2320-0936 Volume-02, Issue-12, pp-75-82AJER JOURNALBelum ada peringkat
- Yuqiang Jin, Yuliang Chen, Zijian Lin and Junwei LeiDokumen5 halamanYuqiang Jin, Yuliang Chen, Zijian Lin and Junwei Leihaseebahmadbhatti0Belum ada peringkat
- Fast Fourier TransformDokumen16 halamanFast Fourier Transformvmacari100% (1)
- Lab 3 - 4 ScilabDokumen8 halamanLab 3 - 4 ScilabIq'wan RodzaiBelum ada peringkat
- Lecture 8Dokumen12 halamanLecture 8Mohamad AbbasBelum ada peringkat
- Nonlinear Control Feedback Linearization Sliding Mode ControlDari EverandNonlinear Control Feedback Linearization Sliding Mode ControlBelum ada peringkat
- Methods For Cogging Torque Reduction of Directly Driven PM Wind GeneratorsDokumen6 halamanMethods For Cogging Torque Reduction of Directly Driven PM Wind GeneratorsBodoShowBelum ada peringkat
- Multi-Information Extraction Algorithm For Power Quality MonitoringDokumen9 halamanMulti-Information Extraction Algorithm For Power Quality MonitoringBodoShowBelum ada peringkat
- Development of Hardware Redundant Embryonic Structure For High Reliability Control ApplicationsDokumen6 halamanDevelopment of Hardware Redundant Embryonic Structure For High Reliability Control ApplicationsBodoShowBelum ada peringkat
- Radial and Axial Short-Circuit Electrodynamic Forces of Three Phase Power TransformersDokumen6 halamanRadial and Axial Short-Circuit Electrodynamic Forces of Three Phase Power TransformersBodoShowBelum ada peringkat
- Electromagnetic Pumping of Molten Salts: J. Etay, V. Fireţeanu, Y. Fautrelle, C. RomanDokumen9 halamanElectromagnetic Pumping of Molten Salts: J. Etay, V. Fireţeanu, Y. Fautrelle, C. RomanBodoShowBelum ada peringkat
- RF 000124Dokumen6 halamanRF 000124BodoShowBelum ada peringkat
- 784 Aiau PDFDokumen5 halaman784 Aiau PDFBodoShowBelum ada peringkat
- Optimal Tuning For A Double Integrator Plus Dead Time: Igor B Elai, Pavol Bist Ak and Mikul A S HubaDokumen5 halamanOptimal Tuning For A Double Integrator Plus Dead Time: Igor B Elai, Pavol Bist Ak and Mikul A S HubaBodoShowBelum ada peringkat
- Model Reference Control of Nonlinear Time-Delayed 1-st Order PlantsDokumen5 halamanModel Reference Control of Nonlinear Time-Delayed 1-st Order PlantsBodoShowBelum ada peringkat
- Integrated System For Prosodic Features Detection From SpeechDokumen4 halamanIntegrated System For Prosodic Features Detection From SpeechBodoShowBelum ada peringkat
- Design of PID Controllers by The Maximum Stability Degree CriterionDokumen6 halamanDesign of PID Controllers by The Maximum Stability Degree CriterionBodoShowBelum ada peringkat
- 805 Aiau PDFDokumen5 halaman805 Aiau PDFBodoShowBelum ada peringkat
- Control Architecture For Power Distribution Systems Based On IEC 61850, IEC 61499 and Holonic ConceptsDokumen5 halamanControl Architecture For Power Distribution Systems Based On IEC 61850, IEC 61499 and Holonic ConceptsBodoShowBelum ada peringkat
- Robustness Analysis of A Disturbance-Observer Based PI ControlDokumen6 halamanRobustness Analysis of A Disturbance-Observer Based PI ControlBodoShowBelum ada peringkat
- Control Strategies For Hybrid Electric Vehicles With Two Energy Sources On BoardDokumen6 halamanControl Strategies For Hybrid Electric Vehicles With Two Energy Sources On BoardBodoShowBelum ada peringkat
- Comparing FOPDT and IPDT Model Based PI Controllers With Disturbance ObserverDokumen4 halamanComparing FOPDT and IPDT Model Based PI Controllers With Disturbance ObserverBodoShowBelum ada peringkat
- A Study of Changes in Image Contrast With Various AlgorithmsDokumen5 halamanA Study of Changes in Image Contrast With Various AlgorithmsBodoShowBelum ada peringkat
- 750 Aiau PDFDokumen4 halaman750 Aiau PDFBodoShowBelum ada peringkat
- Disctrete Time Feedback Linearization Method For Dynamical Adaptive Control of Electronic ThrottleDokumen5 halamanDisctrete Time Feedback Linearization Method For Dynamical Adaptive Control of Electronic ThrottleBodoShowBelum ada peringkat
- Robust Tuning of The Simplest Dead Time Compensators: Mikul A S HubaDokumen6 halamanRobust Tuning of The Simplest Dead Time Compensators: Mikul A S HubaBodoShowBelum ada peringkat
- Demonstrating Effects of A Dynamical Feedforward Control For The First Order SystemDokumen5 halamanDemonstrating Effects of A Dynamical Feedforward Control For The First Order SystemBodoShowBelum ada peringkat
- 569 Aiau PDFDokumen5 halaman569 Aiau PDFBodoShowBelum ada peringkat
- Battery Powered Dust MonitorDokumen1 halamanBattery Powered Dust MonitorBodoShowBelum ada peringkat
- Neural Network Used in Thunderstorm PredictionDokumen5 halamanNeural Network Used in Thunderstorm PredictionBodoShowBelum ada peringkat
- 585 Aiau PDFDokumen4 halaman585 Aiau PDFBodoShowBelum ada peringkat
- About Robust Control On Nonlinear Chaotic Oscillators: Mihaela ClejuDokumen5 halamanAbout Robust Control On Nonlinear Chaotic Oscillators: Mihaela ClejuBodoShowBelum ada peringkat
- 1 s2.0 S0378779612000405 Main - 2Dokumen10 halaman1 s2.0 S0378779612000405 Main - 2BodoShowBelum ada peringkat
- ESP8266 Wipe and ReinstallDokumen3 halamanESP8266 Wipe and ReinstallBodoShowBelum ada peringkat
- Elsaco Corporate Brochure EN PDFDokumen14 halamanElsaco Corporate Brochure EN PDFBodoShowBelum ada peringkat
- The Family Handyman-468 May 2006Dokumen71 halamanThe Family Handyman-468 May 2006BodoShow100% (4)
- اسس هندسة السيطرة النظري-مرحلة ثالثة-قسم هندسة تقنيات الحاسوبDokumen80 halamanاسس هندسة السيطرة النظري-مرحلة ثالثة-قسم هندسة تقنيات الحاسوبطيبه محمد احمد حمد هندسة تقنيات الحاسوبBelum ada peringkat
- Answer:: Question 6. Where The Plc's Are Used?Dokumen4 halamanAnswer:: Question 6. Where The Plc's Are Used?PrakashBelum ada peringkat
- Automotive Electrical & Electronic Systems - An OverviewDokumen64 halamanAutomotive Electrical & Electronic Systems - An Overviewrizaazari4530Belum ada peringkat
- Beck CatalogDokumen88 halamanBeck CatalogJavier GutierrezBelum ada peringkat
- Intelligent Control Systems: Dr. Wael M.F. Abdel-KarimDokumen14 halamanIntelligent Control Systems: Dr. Wael M.F. Abdel-KarimMohamed SayedBelum ada peringkat
- 1600 QuestionsDokumen266 halaman1600 QuestionsKaRan RanaBelum ada peringkat
- Easy Auto Tuning GuideDokumen8 halamanEasy Auto Tuning Guidepanderial100% (1)
- Relap5/Mod3.3 Code Manual Volume Ii: User'S Guide and Input RequirementsDokumen160 halamanRelap5/Mod3.3 Code Manual Volume Ii: User'S Guide and Input RequirementsWilhelm ThorleyBelum ada peringkat
- KP-00+++-CY712-G0047-Rev 0-COMMISSIONING AND TEST PROCEDURE FOR MOTOR OPERATED VALVES MOV PDFDokumen14 halamanKP-00+++-CY712-G0047-Rev 0-COMMISSIONING AND TEST PROCEDURE FOR MOTOR OPERATED VALVES MOV PDFrebinshwBelum ada peringkat
- UF MAE Schedule Fall 2016Dokumen2 halamanUF MAE Schedule Fall 2016salil91Belum ada peringkat
- Control System Design For A Configurable Hybrid VehicleDokumen23 halamanControl System Design For A Configurable Hybrid VehicleranamanaBelum ada peringkat
- ELG3155 - Control SystemsDokumen5 halamanELG3155 - Control SystemsTurab HaiderBelum ada peringkat
- Technical Specification of Steel Rolling MillDokumen114 halamanTechnical Specification of Steel Rolling Millsameh131150% (2)
- A LabVIEW Based Submarine Depth ControlDokumen6 halamanA LabVIEW Based Submarine Depth Controljamni10Belum ada peringkat
- 2.direct Digital ControlDokumen28 halaman2.direct Digital ControlPrasanth ChitturiBelum ada peringkat
- Netzsch Labstar eDokumen12 halamanNetzsch Labstar eKrrliveBelum ada peringkat
- Gas Turbine Controls EngineerDokumen3 halamanGas Turbine Controls EngineerHBNBILBelum ada peringkat
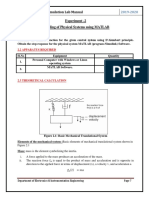
- Control Systems & Simulation Lab Manual Experiment - 2 Modeling of Physical Systems Using MATLABDokumen5 halamanControl Systems & Simulation Lab Manual Experiment - 2 Modeling of Physical Systems Using MATLABKrushnasamy SuramaniyanBelum ada peringkat
- EE 311 Feedback 3Dokumen10 halamanEE 311 Feedback 3AkiHiro San CarcedoBelum ada peringkat
- Me8791-Mechatronics MCQDokumen62 halamanMe8791-Mechatronics MCQMonith ViswanathanBelum ada peringkat
- General Contractor, Supplier, Independent Survey, Ship Service & IndustrialDokumen24 halamanGeneral Contractor, Supplier, Independent Survey, Ship Service & IndustrialNicoBelum ada peringkat
- Pressure Reducing and Surplussing Valva-Spirax-SarcoDokumen18 halamanPressure Reducing and Surplussing Valva-Spirax-SarcocysautsBelum ada peringkat
- DCS Control System StandardDokumen33 halamanDCS Control System StandardMauro MLRBelum ada peringkat
- (D10D626,634,634 F Manual 2017.V1.0Dokumen136 halaman(D10D626,634,634 F Manual 2017.V1.0Carlos Contreras93% (15)
- Feedback Control System: Exercise 2Dokumen2 halamanFeedback Control System: Exercise 2Noor Nadiah Mohd AzaliBelum ada peringkat
- Sand Lime MixesDokumen12 halamanSand Lime MixesMaryknoll SabBelum ada peringkat
- Triple Walled Vertical AutoclaveDokumen8 halamanTriple Walled Vertical Autoclavesaurabh_acmasBelum ada peringkat
- Variable Injection Timing and Fuel Quality SettingDokumen17 halamanVariable Injection Timing and Fuel Quality Settingsevero97Belum ada peringkat
- M. Gopal - Digital Control and State Variable Methods - Conventional and Intelligent Control Systems-Tata-McGraw Hill (2009)Dokumen796 halamanM. Gopal - Digital Control and State Variable Methods - Conventional and Intelligent Control Systems-Tata-McGraw Hill (2009)mathematically Real67% (3)
- RTS2010 Parker Plant Operator Manual For Static PlantDokumen19 halamanRTS2010 Parker Plant Operator Manual For Static Plantandre100% (2)