Anda mungkin juga menyukai
- Motor CC avaliação 1Dokumen3 halamanMotor CC avaliação 1alan_smoBelum ada peringkat
- Exer MaquinaseletricasDokumen8 halamanExer MaquinaseletricasLuiz JesusBelum ada peringkat
- Exercícios Comandos Elétricos MáquinasDokumen3 halamanExercícios Comandos Elétricos MáquinasAugusto RodriguesBelum ada peringkat
- Engrenagens e Cremalheiras: Exercícios de Cálculo e AnáliseDokumen7 halamanEngrenagens e Cremalheiras: Exercícios de Cálculo e AnáliseGuilherme Henrique LourençoBelum ada peringkat
- Atividade Prática - Teste de Portas LógicaDokumen2 halamanAtividade Prática - Teste de Portas LógicaVanessa LopesBelum ada peringkat
- Simulado SAEP - Partida de motores e circuitos elétricosDokumen20 halamanSimulado SAEP - Partida de motores e circuitos elétricosdanielfortalBelum ada peringkat
- Lista de exercícios de engenharia elétrica sobre núcleos ferromagnéticosDokumen3 halamanLista de exercícios de engenharia elétrica sobre núcleos ferromagnéticosozisoaresBelum ada peringkat
- Sist Hidráulicos & Pneumáticos 010609Dokumen3 halamanSist Hidráulicos & Pneumáticos 010609Danilo SilvaBelum ada peringkat
- Unidade 2 - Máquinas ElétricasDokumen34 halamanUnidade 2 - Máquinas ElétricasEduardo Godoy PignatonBelum ada peringkat
- Usinagem: Exercícios sobre roscas e furaçãoDokumen4 halamanUsinagem: Exercícios sobre roscas e furaçãorcejrBelum ada peringkat
- Lista de Exercícios 1 - Circuitos Resistivos CCDokumen4 halamanLista de Exercícios 1 - Circuitos Resistivos CCJhonatha BernardoBelum ada peringkat
- Atividade Calibradores e Verificadores AttDokumen2 halamanAtividade Calibradores e Verificadores AttJoão Pedro Bertin CruzBelum ada peringkat
- Lista Exercícios EletromecânicaDokumen6 halamanLista Exercícios EletromecânicaAquila AlissonBelum ada peringkat
- Lista de Exercícios 1Dokumen3 halamanLista de Exercícios 1Guibson Silva SantosBelum ada peringkat
- Exercicio de TraçagemDokumen1 halamanExercicio de TraçagemLeo ConstantinoBelum ada peringkat
- Instalações elétricas - Circuitos de controlo de iluminaçãoDokumen4 halamanInstalações elétricas - Circuitos de controlo de iluminaçãomarioalves1977Belum ada peringkat
- Medindo com precisão: o micrômetroDokumen48 halamanMedindo com precisão: o micrômetroOtavio NetoBelum ada peringkat
- Sistema Internacional de Unidades e MetrologiaDokumen17 halamanSistema Internacional de Unidades e MetrologiaIsabelle RangelBelum ada peringkat
- Revisão para Prova: Disjuntores e esquemas de aterramentoDokumen8 halamanRevisão para Prova: Disjuntores e esquemas de aterramentoMatheus OliveiraBelum ada peringkat
- APOSTILA Corrente ElétricaDokumen3 halamanAPOSTILA Corrente ElétricaValeska LucenaBelum ada peringkat
- Trabalho de Motor de PassoDokumen23 halamanTrabalho de Motor de Passosaulomachado8262Belum ada peringkat
- Lab - 03 - Protoboard e Associacao de Resistores PDFDokumen3 halamanLab - 03 - Protoboard e Associacao de Resistores PDFryukenjrBelum ada peringkat
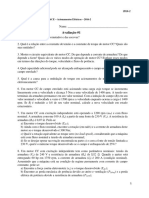
- Avaliacao Maquinas Eletricas e AcionamentosDokumen8 halamanAvaliacao Maquinas Eletricas e AcionamentosengetroniBelum ada peringkat
- Aula 4 RedutoresDokumen29 halamanAula 4 RedutoresGEDEON GONCALVES ROCHABelum ada peringkat
- Exercícios CNC fresamentoDokumen14 halamanExercícios CNC fresamentoAdriano RomanioBelum ada peringkat
- Exercícios para RevisãoDokumen6 halamanExercícios para RevisãoCaio ValérioBelum ada peringkat
- Elementos de Apoio PDFDokumen41 halamanElementos de Apoio PDFChristopher SnowBelum ada peringkat
- Lista de Exercicios - Elemento de FixaçãoDokumen4 halamanLista de Exercicios - Elemento de FixaçãoRobertodeOLiveiraBelum ada peringkat
- Questionário de Máquinas ElétricasDokumen6 halamanQuestionário de Máquinas ElétricasRamon da Cruz MartinsBelum ada peringkat
- Lista de Exercícios - EngrenagensDokumen2 halamanLista de Exercícios - EngrenagensLeonardo MeloBelum ada peringkat
- Acionamentos ElétricosDokumen2 halamanAcionamentos ElétricosThiago FioreseBelum ada peringkat
- Relatório - EngrenagemDokumen9 halamanRelatório - EngrenagemMaria Júlia XavierBelum ada peringkat
- Exercícios de Processamento de MetaisDokumen8 halamanExercícios de Processamento de MetaisLeonardo ChiferiBelum ada peringkat
- Exercício - 11 - Instalações Elétricas I - 02 2016 PitágorasDokumen4 halamanExercício - 11 - Instalações Elétricas I - 02 2016 PitágorasViniciusCamargosBelum ada peringkat
- Exercícios Corrente AlternadaDokumen7 halamanExercícios Corrente Alternadaengfabio90Belum ada peringkat
- Chapa característica do motorDokumen4 halamanChapa característica do motorAbdul Laura CondulaBelum ada peringkat
- Exercícios-Equipe 06 de Instrumentação IFPADokumen4 halamanExercícios-Equipe 06 de Instrumentação IFPAMikéias KbralBelum ada peringkat
- 10 mandamentos para projetar uma PCBDokumen16 halaman10 mandamentos para projetar uma PCBGiovanna SiqueiraBelum ada peringkat
- Instrumentação Aplicada - TerminologiaDokumen53 halamanInstrumentação Aplicada - Terminologiammd3100% (1)
- Lista Exercícios Controle ProcessosDokumen2 halamanLista Exercícios Controle ProcessosJonathas SilvaBelum ada peringkat
- Gestão da Manutenção e FiabilidadeDokumen22 halamanGestão da Manutenção e Fiabilidadesofiamendes53336Belum ada peringkat
- Motores CC: Características e ComponentesDokumen48 halamanMotores CC: Características e Componentesmhulavas100% (1)
- Avaliação Eletricidade Eletrônica Módulo 5Dokumen4 halamanAvaliação Eletricidade Eletrônica Módulo 5Ana Júlia CorreiaBelum ada peringkat
- Relatorio AjustagemDokumen4 halamanRelatorio AjustagemCaio4860% (1)
- Medição de grandezas elétricas com multímetroDokumen6 halamanMedição de grandezas elétricas com multímetroBianca FariasBelum ada peringkat
- Exercícios de EngrenagensDokumen2 halamanExercícios de EngrenagensrcejrBelum ada peringkat
- Simulado Saep 2016Dokumen21 halamanSimulado Saep 2016danielfortal100% (1)
- Técnico em eletrotécnica - exercícios de revisão para provaDokumen3 halamanTécnico em eletrotécnica - exercícios de revisão para provaRodrigo AndradeBelum ada peringkat
- Motores de indução: principais conceitos e aplicaçõesDokumen25 halamanMotores de indução: principais conceitos e aplicaçõesShueidy BragaBelum ada peringkat
- CLPG4 Aula 7 2017 2 PDFDokumen7 halamanCLPG4 Aula 7 2017 2 PDFSilvio FirminoBelum ada peringkat
- TORNEAMENTO 3 AtividadeDokumen1 halamanTORNEAMENTO 3 AtividadeCanal Barry AllanBelum ada peringkat
- Chave de Partida Soft-StarterDokumen44 halamanChave de Partida Soft-StarterMoisés Gomes de Lima100% (1)
- Atividade EletrohidraulicaDokumen6 halamanAtividade EletrohidraulicaAtubesBelum ada peringkat
- Motores de indução trifásicos: princípio de funcionamento e análise do rotorDokumen10 halamanMotores de indução trifásicos: princípio de funcionamento e análise do rotorLMO007Belum ada peringkat
- 1,2Dokumen45 halaman1,2ScribdTranslationsBelum ada peringkat
- Redutores: tipos, partes e seleção emDokumen20 halamanRedutores: tipos, partes e seleção emCaio Jose do Espirito SantoBelum ada peringkat
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoDari EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoBelum ada peringkat
- Apostila de Comandos Elétrico (SENAI) PDFDokumen282 halamanApostila de Comandos Elétrico (SENAI) PDFJDT100% (2)
- Apostila 1 - MS Project 2016 (Básico)Dokumen15 halamanApostila 1 - MS Project 2016 (Básico)JDTBelum ada peringkat
- 18 - 1 - Resumo Lugar Das RaizesDokumen1 halaman18 - 1 - Resumo Lugar Das RaizesJDTBelum ada peringkat
- 14 00 Desafios Da Pesquisa e Desenvolvimento para Smart Grid-Aneel-Maximo Luiz PompermayerDokumen13 halaman14 00 Desafios Da Pesquisa e Desenvolvimento para Smart Grid-Aneel-Maximo Luiz PompermayerJDTBelum ada peringkat
- 14 00 Desafios Da Pesquisa e Desenvolvimento para Smart Grid-Ieeusp-Jose AquilesDokumen35 halaman14 00 Desafios Da Pesquisa e Desenvolvimento para Smart Grid-Ieeusp-Jose AquilesJDTBelum ada peringkat
- Apostila SpdaDokumen10 halamanApostila SpdaDaiana Negherbon Sanseverino100% (1)
- 15.00 - Sistema Computacional - José Ricardo Portillo Navas - KNBSDokumen34 halaman15.00 - Sistema Computacional - José Ricardo Portillo Navas - KNBSJDTBelum ada peringkat
- 15 20 Sistema de Monitoramento Aplicado Ao Conceito Smartgrid-Alexandre Bagarolli PDFDokumen25 halaman15 20 Sistema de Monitoramento Aplicado Ao Conceito Smartgrid-Alexandre Bagarolli PDFJDTBelum ada peringkat
- 15 20 Sistema de Monitoramento Aplicado Ao Conceito Smartgrid-Alexandre Bagarolli PDFDokumen25 halaman15 20 Sistema de Monitoramento Aplicado Ao Conceito Smartgrid-Alexandre Bagarolli PDFJDTBelum ada peringkat
- 08-30 Iec-Amaury Santos PDFDokumen12 halaman08-30 Iec-Amaury Santos PDFJDTBelum ada peringkat
- 08-30 Iec-Amaury Santos PDFDokumen12 halaman08-30 Iec-Amaury Santos PDFJDTBelum ada peringkat
- Apostila SpdaDokumen10 halamanApostila SpdaDaiana Negherbon Sanseverino100% (1)
- Apostila Msp430 - C - Parte IDokumen55 halamanApostila Msp430 - C - Parte ICecilio MartinsBelum ada peringkat
- Painéis Elétricos e CCMsDokumen66 halamanPainéis Elétricos e CCMsOsvaldo CruzBelum ada peringkat
- 10 50 Infraestrutura Necessaria para Smart Grid-Trinity-Paulo HumbertoDokumen20 halaman10 50 Infraestrutura Necessaria para Smart Grid-Trinity-Paulo HumbertoJDTBelum ada peringkat
- Revista Potência Ed 148 PDFDokumen84 halamanRevista Potência Ed 148 PDFJDTBelum ada peringkat
- Curso de Comandos Elétricos e SilbologiaDokumen47 halamanCurso de Comandos Elétricos e SilbologiaDarlan78% (9)
- Apostila Acionamentos Eletricos 2008 NeemiasDokumen56 halamanApostila Acionamentos Eletricos 2008 Neemiasrodrigo_0909Belum ada peringkat
- Padrão de Comunicação Zigbee.Dokumen11 halamanPadrão de Comunicação Zigbee.JDTBelum ada peringkat
- Apostila SpdaDokumen10 halamanApostila SpdaDaiana Negherbon Sanseverino100% (1)
- Apostila TechTrain MSP430 PARTE IDokumen56 halamanApostila TechTrain MSP430 PARTE IJDT100% (1)
- As 10 principais partidas de motoresDokumen39 halamanAs 10 principais partidas de motoresJohnathan BarbosaBelum ada peringkat
- Apostila SpdaDokumen10 halamanApostila SpdaDaiana Negherbon Sanseverino100% (1)
- AED - N2 Padrão de Comunicação ZigbeeDokumen11 halamanAED - N2 Padrão de Comunicação ZigbeeJDTBelum ada peringkat
- Smartgrid - Um Caminho Desenhado Na Maturidade Individual e Específica de EmpresaDokumen19 halamanSmartgrid - Um Caminho Desenhado Na Maturidade Individual e Específica de EmpresaJDTBelum ada peringkat
- Introdução ao Arduino DuemilanoveDokumen89 halamanIntrodução ao Arduino DuemilanoveJDTBelum ada peringkat
- PDS Simples AplicaçãoDokumen9 halamanPDS Simples AplicaçãoJDTBelum ada peringkat
- Apostila de Inversores de Frequência 1Dokumen3 halamanApostila de Inversores de Frequência 1Lupércio GuedesBelum ada peringkat
- Intro Ao ArduinoDokumen31 halamanIntro Ao ArduinoJDTBelum ada peringkat
- Manuscrito CinintelDokumen10 halamanManuscrito CinintelJosé Esivaldo SantosBelum ada peringkat
- Steel Frame - Vantagens e DesvantagensDokumen2 halamanSteel Frame - Vantagens e DesvantagensGabriela Peres MendesBelum ada peringkat
- Decreto abre crédito R$ 4,45 mi FUMECDokumen44 halamanDecreto abre crédito R$ 4,45 mi FUMEClefaccioniBelum ada peringkat
- Citroën C2 Manual TécnicoDokumen200 halamanCitroën C2 Manual TécnicoOsair Dos Santos XavierBelum ada peringkat
- C200 Manual ToppoDokumen1 halamanC200 Manual ToppoAlbertoBelum ada peringkat
- União Europeia e PortugalDokumen12 halamanUnião Europeia e PortugalVitória Al 17331Belum ada peringkat
- Transições demográficas e mudanças nos arranjos familiares no BrasilDokumen24 halamanTransições demográficas e mudanças nos arranjos familiares no BrasilDorysBelum ada peringkat
- Plano Integrado de Comunicação EmpresarialDokumen2 halamanPlano Integrado de Comunicação EmpresarialRégia Cristina100% (1)
- Manual-In100 Solicitacao Do TermoDokumen17 halamanManual-In100 Solicitacao Do TermoViníciusBelum ada peringkat
- F 01 Investigação de Acidentes e IncidentesDokumen9 halamanF 01 Investigação de Acidentes e IncidentesLeandro FiauxBelum ada peringkat
- Tabela de materiais e especificações para circuitos impressosDokumen63 halamanTabela de materiais e especificações para circuitos impressosEdu ArdoBelum ada peringkat
- Ativacao Do Corel Draw X5Dokumen1 halamanAtivacao Do Corel Draw X5RodolfoRochaADS0% (3)
- Melhores épocas de semeadura para soja e milho irrigado e sequeiroDokumen55 halamanMelhores épocas de semeadura para soja e milho irrigado e sequeiroOdilon Nascimento da SilvaBelum ada peringkat
- Catálogo - Evaporador BMDokumen8 halamanCatálogo - Evaporador BMDouglas W. Dos SantosBelum ada peringkat
- Ponte de WheatstoneDokumen5 halamanPonte de WheatstonetuanecaBelum ada peringkat
- Desinfetante Minuano Floral FISPQDokumen6 halamanDesinfetante Minuano Floral FISPQTiago MeazzaBelum ada peringkat
- Detecção de Erros em Comunicações de Dados usando CódigosDokumen11 halamanDetecção de Erros em Comunicações de Dados usando CódigosLuiz Roberto LeichtBelum ada peringkat
- Orientações para Cada ClienteDokumen2 halamanOrientações para Cada ClienteCarlos Eduardo DuduBelum ada peringkat
- Portaria delega competência para prática de atos administrativos no Exército BrasileiroDokumen21 halamanPortaria delega competência para prática de atos administrativos no Exército BrasileiroThiago BentesBelum ada peringkat
- Teorias da gestão e recursos organizacionaisDokumen21 halamanTeorias da gestão e recursos organizacionaisBruna Oliveira100% (1)
- Você Sabia?: Confira As Novidades Do Manual Da Organização Nacional de Acreditação Essa Versão É Válida de 2022 Até 2025Dokumen11 halamanVocê Sabia?: Confira As Novidades Do Manual Da Organização Nacional de Acreditação Essa Versão É Válida de 2022 Até 2025RaymundoBelum ada peringkat
- Monopólio, monopsônio e poder de mercadoDokumen9 halamanMonopólio, monopsônio e poder de mercadoLucas FerrariBelum ada peringkat
- Regulamenta PAC-M para contratações públicas municipaisDokumen5 halamanRegulamenta PAC-M para contratações públicas municipaisWal H OliverBelum ada peringkat
- O Projecto de Pande e Temane Dispõe de Um Gasoduto de 865 KMDokumen3 halamanO Projecto de Pande e Temane Dispõe de Um Gasoduto de 865 KMVanildoBelum ada peringkat
- Apresentação GRUPO AZOZ para Predio 2020 V2Dokumen22 halamanApresentação GRUPO AZOZ para Predio 2020 V2Leandro BeluominiBelum ada peringkat
- chk9 Teste Avaliacao1Dokumen6 halamanchk9 Teste Avaliacao1Sílvia AmadoBelum ada peringkat
- Instalando Scratch Jr em qualquer dispositivoDokumen15 halamanInstalando Scratch Jr em qualquer dispositivoRodrigoPauloQuirinoBelum ada peringkat
- Visao Geral Sobre Monitores de LCD PDFDokumen3 halamanVisao Geral Sobre Monitores de LCD PDFAntonio Carlos CardosoBelum ada peringkat
- Arquitetura No Brasil, Ensino e ProfissãoDokumen26 halamanArquitetura No Brasil, Ensino e ProfissãoCarolina Grossi CremaBelum ada peringkat
- ValeForms Form Self ScreeningDokumen3 halamanValeForms Form Self Screeninggabrielcesan.20Belum ada peringkat
- RC 10166432 ET - TM - 082 - 2022 - SE - SAAN - MPPG - WP - 4331 - SAP - 168720 - Rev - 0 - 20230223184222.316 - XDokumen12 halamanRC 10166432 ET - TM - 082 - 2022 - SE - SAAN - MPPG - WP - 4331 - SAP - 168720 - Rev - 0 - 20230223184222.316 - XDouglas AlexandreBelum ada peringkat