Anda mungkin juga menyukai
- Monografia Robotica en Las Escuelas de San Juan Castillo Dueña ParedesDokumen21 halamanMonografia Robotica en Las Escuelas de San Juan Castillo Dueña ParedesNicolas MarunBelum ada peringkat
- Actividad #2 Cuestionario de RobóticaDokumen12 halamanActividad #2 Cuestionario de RobóticaLuis Eliecer EscorciaBelum ada peringkat
- Proyecto de Tesis 2019Dokumen178 halamanProyecto de Tesis 2019Santos Chuqui Matos100% (1)
- Habilidades digitales cuestionario unidad 1Dokumen4 halamanHabilidades digitales cuestionario unidad 1NormaBelum ada peringkat
- TALLER No1 - BIOLOGÍA 6º GRADODokumen1 halamanTALLER No1 - BIOLOGÍA 6º GRADOCarolina Maldonado100% (1)
- Contrato de Pared y TechoDokumen1 halamanContrato de Pared y TechoEberTaypeCayllahuaBelum ada peringkat
- Cómo funciona la vista: descubriendo el órgano sensorial del sentido de la vistaDokumen4 halamanCómo funciona la vista: descubriendo el órgano sensorial del sentido de la vistaEvelynLisetteCuellarSilva0% (1)
- Conceptos intimidad redDokumen3 halamanConceptos intimidad redBLADIMIRO GARCIA SEVERICHEBelum ada peringkat
- Historia Del Computador Taller 4 GradoDokumen2 halamanHistoria Del Computador Taller 4 GradoKelly Patricia Vargas Vásquez100% (1)
- QUINTO CT - PLANIFICACION Y Experiencia de Aprendizaje #1 - 2021Dokumen5 halamanQUINTO CT - PLANIFICACION Y Experiencia de Aprendizaje #1 - 2021Yobana Zevallos SantillanBelum ada peringkat
- Ensayo de Gobernanza de InternetDokumen3 halamanEnsayo de Gobernanza de InternetVivi Lojan100% (1)
- Apa Converido IEEE A APA 1234Dokumen43 halamanApa Converido IEEE A APA 1234Jorge GonzalezBelum ada peringkat
- La Robótica en El Entorno Educativo de Educación Primaria 2Dokumen12 halamanLa Robótica en El Entorno Educativo de Educación Primaria 2magybucheli75% (4)
- Articulo 1Dokumen4 halamanArticulo 1Alex Eduardo CalderonBelum ada peringkat
- Robotica EducativaDokumen38 halamanRobotica EducativaFrancisco Ventura Rodríguez CristinaBelum ada peringkat
- Objetivos de La Robótica EducativaDokumen27 halamanObjetivos de La Robótica EducativaMartha MonroyBelum ada peringkat
- La RobóticaDokumen4 halamanLa Robóticajhonatan canoBelum ada peringkat
- Tarea Wedo 1Dokumen4 halamanTarea Wedo 1MaribelGarciaBelum ada peringkat
- Robotic A en MexicoDokumen80 halamanRobotic A en MexicoJosué Rodríguez DíazBelum ada peringkat
- Taller de SistemasDokumen4 halamanTaller de SistemasJhon Diego Cardenas ochoaBelum ada peringkat
- Historia de La RoboticaDokumen4 halamanHistoria de La RoboticaEdison SaavedraBelum ada peringkat
- Texto Original RoboticaDokumen23 halamanTexto Original RoboticaEfren Jose Carrillo MorgadoBelum ada peringkat
- Robótica Educativa en Las AulasDokumen28 halamanRobótica Educativa en Las AulasXarly González Afk100% (2)
- Robótica Educativa. La Programación Como Parte de Un Proceso EducativoDokumen11 halamanRobótica Educativa. La Programación Como Parte de Un Proceso EducativoYury Silva D'AvilaBelum ada peringkat
- Trabajo Final Proyecto de IngenieriaDokumen16 halamanTrabajo Final Proyecto de IngenieriaRaul Andres MendezBelum ada peringkat
- Que Es La RobóticaDokumen8 halamanQue Es La RobóticaJosue Diaz SanabriaBelum ada peringkat
- Informe FinalDokumen7 halamanInforme Finalvicky mBelum ada peringkat
- Robot Edu PlatDokumen6 halamanRobot Edu PlatAnthony PayneBelum ada peringkat
- Estado de Arte Robot ParaleloDokumen7 halamanEstado de Arte Robot ParaleloWilliam Sánchez LldmBelum ada peringkat
- La RoboticaDokumen13 halamanLa RoboticaAlejandro CamiloBelum ada peringkat
- Guia Del Maestro Robokids 1 - Róbo-EdDokumen75 halamanGuia Del Maestro Robokids 1 - Róbo-Edgeovanni valladaresBelum ada peringkat
- Guía #1 de Robotica-Yadisbel PDFDokumen9 halamanGuía #1 de Robotica-Yadisbel PDFtecno team ctg100% (1)
- BORRADORDokumen8 halamanBORRADORFernando NavarroBelum ada peringkat
- Guia de Aprendizaje 1-1Dokumen2 halamanGuia de Aprendizaje 1-1Paola RodriguezBelum ada peringkat
- 3 - Introducción A La Robótica EducativaDokumen6 halaman3 - Introducción A La Robótica Educativajulian ifranBelum ada peringkat
- RobotsDokumen10 halamanRobotsTapia Vázquez NinaBelum ada peringkat
- Modulo 1 Titulo 1 Robotica 1Dokumen7 halamanModulo 1 Titulo 1 Robotica 1angelica joannaBelum ada peringkat
- RobóticaDokumen11 halamanRobóticaDays BSBelum ada peringkat
- INFORME de ROBÓTICADokumen24 halamanINFORME de ROBÓTICAClaudia MéndezBelum ada peringkat
- Módulo 1: Iniciación A La Robótica EducativaDokumen35 halamanMódulo 1: Iniciación A La Robótica EducativaEfraín LinBelum ada peringkat
- 5079 10295 1 SMDokumen4 halaman5079 10295 1 SMjose asuaBelum ada peringkat
- Texto Academico Semana 4Dokumen18 halamanTexto Academico Semana 4antonio chumaceroBelum ada peringkat
- Historia de Los RobotsDokumen7 halamanHistoria de Los RobotsAntonio NavarreteBelum ada peringkat
- Ponencia CIEDUC2017 Paper 109Dokumen8 halamanPonencia CIEDUC2017 Paper 109Leonardo CaBelum ada peringkat
- El Programa de Robótica TangibleKDokumen27 halamanEl Programa de Robótica TangibleKgocs80Belum ada peringkat
- Proyecto de Una Robotica MovilDokumen13 halamanProyecto de Una Robotica Moviljesus de la cruzBelum ada peringkat
- Trabajo Final Taller de InvestigaciónDokumen31 halamanTrabajo Final Taller de InvestigaciónJuan MH100% (2)
- PROYECTODokumen5 halamanPROYECTOricardo quesadaBelum ada peringkat
- Capítulo 1 de Introducción Del Libro RoboticaDokumen5 halamanCapítulo 1 de Introducción Del Libro RoboticaCesarGonzalezBelum ada peringkat
- Guía de estudio aprendo en casa sobre robóticaDokumen4 halamanGuía de estudio aprendo en casa sobre robóticaInesafa ChinúBelum ada peringkat
- Metodología de La InvestigaciónDokumen3 halamanMetodología de La InvestigaciónRodrigoBelum ada peringkat
- D Análisis WilberdAlvarez PDFDokumen9 halamanD Análisis WilberdAlvarez PDFLuis Eliecer EscorciaBelum ada peringkat
- NievasDokumen5 halamanNievasLuciano PerezBelum ada peringkat
- Estado Del ArteDokumen4 halamanEstado Del ArteFabian German RodriguezBelum ada peringkat
- Definiciones RobotDokumen3 halamanDefiniciones RobotedgarBelum ada peringkat
- Ra Ximhai 1665-0441: Issn: Raximhai@uaim - Edu.mxDokumen25 halamanRa Ximhai 1665-0441: Issn: Raximhai@uaim - Edu.mxcloudBelum ada peringkat
- 1.1 Fundamentos de Robotica EducativaDokumen19 halaman1.1 Fundamentos de Robotica EducativaDouglas Alirio Nolásco MartínezBelum ada peringkat
- Robotica HistoriaDokumen7 halamanRobotica HistoriaAlex RoseBelum ada peringkat
- Informe Trabajo SocialDokumen22 halamanInforme Trabajo Socialjuan daniel pinillos granadosBelum ada peringkat
- Origen de La RoboticaDokumen11 halamanOrigen de La RoboticaXavier RestrepoBelum ada peringkat
- Mariposas El Fascinante Mundo de Las Parramon Norma 1991Dokumen39 halamanMariposas El Fascinante Mundo de Las Parramon Norma 1991Arelis LLannosBelum ada peringkat
- Actualización Base de Datos de Estudiantes de 10º y 11º Relacionada Con El Uso de Medios de Comunicación en CasaDokumen27 halamanActualización Base de Datos de Estudiantes de 10º y 11º Relacionada Con El Uso de Medios de Comunicación en CasaArelis LLannosBelum ada peringkat
- Para La Seño Seño NeiraDokumen5 halamanPara La Seño Seño NeiraArelis LLannosBelum ada peringkat
- Proyecto NegritosDokumen9 halamanProyecto Negritosarelis LlanosBelum ada peringkat
- Informe UDES IndiraDokumen4 halamanInforme UDES IndiraArelis LLannosBelum ada peringkat
- Periodo UnoDokumen2 halamanPeriodo UnoArelis LLannosBelum ada peringkat
- Pruebas Saber LuruacoDokumen1 halamanPruebas Saber LuruacoArelis LLannosBelum ada peringkat
- Acta de REUNION VIRTUALDokumen8 halamanActa de REUNION VIRTUALArelis LLannosBelum ada peringkat
- CONVIVENCIADokumen22 halamanCONVIVENCIAArelis LLannosBelum ada peringkat
- Los Procesos de Enseñanza y Aprendizaje A Través de La DáctilopinturaDokumen6 halamanLos Procesos de Enseñanza y Aprendizaje A Través de La DáctilopinturaArelis LLannosBelum ada peringkat
- REPORTE SEMANAL DE EVIDENCIAS Y RETROALIMENTACIÓN (1) (Autoguardado)Dokumen5 halamanREPORTE SEMANAL DE EVIDENCIAS Y RETROALIMENTACIÓN (1) (Autoguardado)Arelis LLannosBelum ada peringkat
- Acta Comisión Evaluación Final 2019 PRIMER GRADODokumen4 halamanActa Comisión Evaluación Final 2019 PRIMER GRADOArelis LLannosBelum ada peringkat
- FormatoDokumen2 halamanFormatoArelis LLannosBelum ada peringkat
- Acta de Discpilna MatematicasDokumen55 halamanActa de Discpilna MatematicasArelis LLannosBelum ada peringkat
- Formato de Flexibilizacion Curricular VIOLA Y MAIDADokumen4 halamanFormato de Flexibilizacion Curricular VIOLA Y MAIDAArelis LLannosBelum ada peringkat
- Compromiso educativoDokumen2 halamanCompromiso educativoArelis LLannos100% (2)
- CONCEPTODokumen1 halamanCONCEPTOArelis LLannosBelum ada peringkat
- Corte PreventivoDokumen3 halamanCorte PreventivoArelis LLannosBelum ada peringkat
- Los Lenguajes ArtísticosDokumen2 halamanLos Lenguajes ArtísticosArelis LLannosBelum ada peringkat
- Formato de Evaluacion Del Servicio A TercerosDokumen2 halamanFormato de Evaluacion Del Servicio A TercerosArelis LLannosBelum ada peringkat
- COMUNICADO NeiraDokumen2 halamanCOMUNICADO NeiraArelis LLannosBelum ada peringkat
- Fase de InvestigaciónDokumen2 halamanFase de InvestigaciónArelis LLannosBelum ada peringkat
- Acta Rendicion de Cuentas 2018Dokumen6 halamanActa Rendicion de Cuentas 2018Arelis LLannosBelum ada peringkat
- Los Lenguajes ArtísticosDokumen2 halamanLos Lenguajes ArtísticosArelis LLannosBelum ada peringkat
- Plan de Accion Pueba Saber 2020Dokumen4 halamanPlan de Accion Pueba Saber 2020Arelis LLannosBelum ada peringkat
- Gestion Academica InformeDokumen5 halamanGestion Academica InformeArelis LLannosBelum ada peringkat
- Formato de Evaluacion Del Servicio A TercerosDokumen2 halamanFormato de Evaluacion Del Servicio A TercerosArelis LLannosBelum ada peringkat
- Fortalecimiento de procesos pedagógicos en Institución Educativa San José de LuruacoDokumen4 halamanFortalecimiento de procesos pedagógicos en Institución Educativa San José de LuruacoArelis LLannosBelum ada peringkat
- Infografia OTRADokumen2 halamanInfografia OTRAArelis LLannosBelum ada peringkat
- Infografia OTRADokumen2 halamanInfografia OTRAArelis LLannosBelum ada peringkat
- Charla OS390Dokumen20 halamanCharla OS390dzapatamBelum ada peringkat
- Guarda y Custodia de Las EMODokumen5 halamanGuarda y Custodia de Las EMOYoni MachadoBelum ada peringkat
- Triptico Importancia Al ClienteDokumen2 halamanTriptico Importancia Al ClienteFrank Jeffrey Pillpe RiverosBelum ada peringkat
- Generador Electrico Casero KVNDokumen13 halamanGenerador Electrico Casero KVNLeykyn Vargas100% (1)
- Trabajo Miel de Abeja peru-EE - UUDokumen15 halamanTrabajo Miel de Abeja peru-EE - UUcriztian lopezBelum ada peringkat
- Convenio de BudapestDokumen3 halamanConvenio de BudapestLeón ColochBelum ada peringkat
- Principios de arquitectura empresarial para la gestión de factores de impacto en entidades públicasDokumen7 halamanPrincipios de arquitectura empresarial para la gestión de factores de impacto en entidades públicasOscama2011Belum ada peringkat
- MODULO 2 Evaluadores de ClínicasDokumen37 halamanMODULO 2 Evaluadores de ClínicasDANIELGAXIOLAQBelum ada peringkat
- Memoria Descriptiva (Caminos I)Dokumen20 halamanMemoria Descriptiva (Caminos I)Andy Greey Mera VásquezBelum ada peringkat
- 15i GPWSDokumen20 halaman15i GPWSEnrique Rubio FernándezBelum ada peringkat
- Informe de FICHAS TECNICAS DE TUBERIA PARA RIEGO Tuboplast 000126Dokumen4 halamanInforme de FICHAS TECNICAS DE TUBERIA PARA RIEGO Tuboplast 000126Junnior MezaBelum ada peringkat
- Procesos EstructuralesDokumen30 halamanProcesos EstructuralesLuis Sima83% (6)
- Según Los Criterios MicrobiológicosDokumen16 halamanSegún Los Criterios MicrobiológicosKenny Junior Mercedes RojasBelum ada peringkat
- Actividad 1 1er Corte - Algebra LinealDokumen34 halamanActividad 1 1er Corte - Algebra LinealKevin Yadir MARTINEZ RAMONBelum ada peringkat
- Mapa MentalDokumen2 halamanMapa Mentalcasillas1961100% (1)
- Pedcti CesarDokumen669 halamanPedcti CesarSanchez JhonBelum ada peringkat
- Brochure - Gestion de FlotasDokumen5 halamanBrochure - Gestion de FlotasEduardo Estewar Moran PittmanBelum ada peringkat
- Aaaa PDFDokumen2 halamanAaaa PDFKenny AlbertBelum ada peringkat
- Guía para la planificación de proyectos artísticos integrales basados en competenciasDokumen16 halamanGuía para la planificación de proyectos artísticos integrales basados en competenciasleonardo javier carreñoBelum ada peringkat
- Diseno Hidraulico Obras de Toma 125-215-1-SMDokumen8 halamanDiseno Hidraulico Obras de Toma 125-215-1-SMEmmanuel MejiaBelum ada peringkat
- Implementación de Los Instrumentos Legales Nacional en El Marco Del "Convenio Fal 65" para Su Implantación en VenezuelaDokumen78 halamanImplementación de Los Instrumentos Legales Nacional en El Marco Del "Convenio Fal 65" para Su Implantación en Venezueladani lopezBelum ada peringkat
- Carta X-RDokumen11 halamanCarta X-RMario HerreraBelum ada peringkat
- Modelo de Demanda de EjecucionDokumen3 halamanModelo de Demanda de EjecucionmarceloBelum ada peringkat
- McdonaldsDokumen26 halamanMcdonaldsDavid Herrera CalderonBelum ada peringkat
- Actividad de Aprendizaje 3 Evidencia Momentos de VerdadDokumen11 halamanActividad de Aprendizaje 3 Evidencia Momentos de VerdadDiana Marcela Góngora Rincones64% (14)
- 11 0906 07 277395 1 1 - DB - 20111030180116Dokumen57 halaman11 0906 07 277395 1 1 - DB - 20111030180116Will J CGBelum ada peringkat
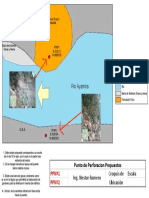
- Formacion Pozo (P-poz) Roca fracturada Rio AyamiraDokumen1 halamanFormacion Pozo (P-poz) Roca fracturada Rio AyamiraJunior Andia CarbajalBelum ada peringkat
- Estructura de La LGCGDokumen2 halamanEstructura de La LGCGCindy Yaqueline OY CaamalBelum ada peringkat
- Desarrollo Sustentable - Unidad 3Dokumen5 halamanDesarrollo Sustentable - Unidad 3Angel RuedaBelum ada peringkat
- Economía en Un DíaDokumen17 halamanEconomía en Un DíaLaura Daniela MartinezBelum ada peringkat