Anda mungkin juga menyukai
- Lab 5. FIR & IIR Filters in Matlab: Filter DesignDokumen12 halamanLab 5. FIR & IIR Filters in Matlab: Filter DesignDrakshayaniMurgodBelum ada peringkat
- DSP Hardware: EKT353 Lecture Notes by Professor Dr. Farid GhaniDokumen44 halamanDSP Hardware: EKT353 Lecture Notes by Professor Dr. Farid GhanifisriiBelum ada peringkat
- High Order Programmable and Tunable Analog Filter ICDokumen16 halamanHigh Order Programmable and Tunable Analog Filter ICRahil JainBelum ada peringkat
- Filter DesignDokumen9 halamanFilter DesignTaylor MaddixBelum ada peringkat
- Development of FiltersDokumen15 halamanDevelopment of FiltersWilson Chan0% (1)
- Field Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterDokumen4 halamanField Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- Digital Signal Synthesis DDS - Tutorial - Rev12!2!99Dokumen122 halamanDigital Signal Synthesis DDS - Tutorial - Rev12!2!99Lixo4618Belum ada peringkat
- ASK PSK Wave Shapes and Demodulation CodeDokumen7 halamanASK PSK Wave Shapes and Demodulation CodeRaqibAhsanBelum ada peringkat
- Introduction To Discrete Time Signals & SystemDokumen119 halamanIntroduction To Discrete Time Signals & SystemMahesh Abnave100% (1)
- Matched FilterDokumen30 halamanMatched FilterLavanya GangadharanBelum ada peringkat
- Design and Implementation of A 10 Bit SAR ADCDokumen4 halamanDesign and Implementation of A 10 Bit SAR ADCVipul ChauhanBelum ada peringkat
- Simplified Analogue Realization of The Digital Direct Synthesis (DDS) Technique For Signal GenerationDokumen5 halamanSimplified Analogue Realization of The Digital Direct Synthesis (DDS) Technique For Signal GenerationInternational Organization of Scientific Research (IOSR)Belum ada peringkat
- Filter Design Guide: A Guide to Analog to Digital Conversion and Ideal Filter ShapesDokumen17 halamanFilter Design Guide: A Guide to Analog to Digital Conversion and Ideal Filter ShapesAnonymous pS4LT2GJUSBelum ada peringkat
- Elec3505 Formula SheetDokumen10 halamanElec3505 Formula SheetDorothy FigueroaBelum ada peringkat
- Analog Electronic Circuits (ECE 201)Dokumen3 halamanAnalog Electronic Circuits (ECE 201)Ankith Jai KrishnaBelum ada peringkat
- Filters Active Passive N Switched CapacitorDokumen24 halamanFilters Active Passive N Switched Capacitorgotti45Belum ada peringkat
- A Basic Introduction To Filters, Active, Passive, and Switched CapacitorDokumen22 halamanA Basic Introduction To Filters, Active, Passive, and Switched CapacitorheadupBelum ada peringkat
- Design and Implementation of IIR FilterDokumen45 halamanDesign and Implementation of IIR FilterSaurabh Shukla67% (3)
- Ca4 - Designing and Implementing FiltersDokumen9 halamanCa4 - Designing and Implementing Filtersapi-223721455Belum ada peringkat
- Digital Filters in VHDL LabDokumen5 halamanDigital Filters in VHDL LabAli AhmadBelum ada peringkat
- DSP Lab Manual C Matlab Programs Draft 2008 B.Tech ECE IV-I JNTU Hyd V 1.9Dokumen47 halamanDSP Lab Manual C Matlab Programs Draft 2008 B.Tech ECE IV-I JNTU Hyd V 1.9Chanukya Krishna Chama100% (21)
- Impulse Response: Mathematical ConsiderationsDokumen4 halamanImpulse Response: Mathematical ConsiderationsAndrea SpencerBelum ada peringkat
- Project 13 - Impedance Matching Design Using Lumped and Distributed Implementations in ADS (October 2013)Dokumen12 halamanProject 13 - Impedance Matching Design Using Lumped and Distributed Implementations in ADS (October 2013)Stephen J. WattBelum ada peringkat
- Pulse ModulationDokumen38 halamanPulse ModulationMr. Ravi Rameshbhai PatelBelum ada peringkat
- Adaptive Lab Matlab Part3Dokumen3 halamanAdaptive Lab Matlab Part3haniaafefBelum ada peringkat
- Active Low Pass Filter Design and ApplicationsDokumen48 halamanActive Low Pass Filter Design and ApplicationsTeheranBelum ada peringkat
- Substrate Integrated Waveguide FiltersDokumen13 halamanSubstrate Integrated Waveguide FiltersSaeedRezvaniBelum ada peringkat
- Analog VlsiDokumen28 halamanAnalog VlsihegdehegdeBelum ada peringkat
- Pro Co Rat AnalysisDokumen16 halamanPro Co Rat AnalysisgianmarcoBelum ada peringkat
- The Transistor Astable Multi VibratorDokumen6 halamanThe Transistor Astable Multi VibratorTavleen KaurBelum ada peringkat
- M-Aray QAMDokumen4 halamanM-Aray QAMLy ThunnethBelum ada peringkat
- Plucked String Models FromtheKarplus StrongAlgorithmtoDigitalWG&BeyondDokumen15 halamanPlucked String Models FromtheKarplus StrongAlgorithmtoDigitalWG&BeyondboboBelum ada peringkat
- SIMULATION OF DIGITAL MODULATION TECHNIQUESDokumen19 halamanSIMULATION OF DIGITAL MODULATION TECHNIQUESThahsin ThahirBelum ada peringkat
- MATLAB Code of LMS AlgorithmDokumen69 halamanMATLAB Code of LMS AlgorithmInayat KhanBelum ada peringkat
- DSP Manual HamdardDokumen52 halamanDSP Manual HamdardMuhammad IrfanBelum ada peringkat
- Mimo CodeDokumen3 halamanMimo CodeEstifanos LisaneworkBelum ada peringkat
- The Valve Wizard - Tremolo OscillatorDokumen3 halamanThe Valve Wizard - Tremolo Oscillatormorag142Belum ada peringkat
- advancedDSP 1Dokumen88 halamanadvancedDSP 1Dr-Raghad Al-FahamBelum ada peringkat
- EC3311-Electronic Devices and Circuits Lab - ManualDokumen99 halamanEC3311-Electronic Devices and Circuits Lab - ManualJenifer niroshaBelum ada peringkat
- Digital Signal Processing Assignment SolutionsDokumen9 halamanDigital Signal Processing Assignment SolutionsPhan Anh HungBelum ada peringkat
- Analog System Design ExperimentsDokumen27 halamanAnalog System Design ExperimentsAnsh BhaganiaBelum ada peringkat
- CS2204 Analog & Digital Communication Question BankDokumen16 halamanCS2204 Analog & Digital Communication Question BankJesse VincentBelum ada peringkat
- Project 5 - Superheterodyne AM Receiver Design in ADS (June 2014)Dokumen4 halamanProject 5 - Superheterodyne AM Receiver Design in ADS (June 2014)Stephen J. WattBelum ada peringkat
- SIDuino I2c Schematics v03Dokumen1 halamanSIDuino I2c Schematics v03Mina BetraBelum ada peringkat
- Low Pass Filter Frequency ResponseDokumen12 halamanLow Pass Filter Frequency ResponseM Azeem100% (1)
- An Overview of Motorola DSP563XX ProcessorsDokumen17 halamanAn Overview of Motorola DSP563XX ProcessorsS G ShivaPrasad YadavBelum ada peringkat
- Multirate Digital Signal ProcessingDokumen59 halamanMultirate Digital Signal ProcessingSairam SairamBelum ada peringkat
- Design Engineering Project Direct Digital SynthesizerDokumen41 halamanDesign Engineering Project Direct Digital SynthesizerManish AbrahamBelum ada peringkat
- 14ec3029 Speech and Audio Signal ProcessingDokumen30 halaman14ec3029 Speech and Audio Signal ProcessingSugumar Sar DuraiBelum ada peringkat
- Zeroscillator OPMAN7Dokumen7 halamanZeroscillator OPMAN7David WurthBelum ada peringkat
- Unit3 IIR DesignDokumen103 halamanUnit3 IIR DesignramuamtBelum ada peringkat
- DSP LAB of FilterDokumen3 halamanDSP LAB of FilterMujtaba FarrukhBelum ada peringkat
- DComm PracticalsDokumen45 halamanDComm PracticalsShubham RathodBelum ada peringkat
- Data Communication Note 6 PDFDokumen12 halamanData Communication Note 6 PDFShahariar Kabir ShuvoBelum ada peringkat
- Analog To Digital Conversion Digital To Analog Conversion: Tanauan City CollegeDokumen44 halamanAnalog To Digital Conversion Digital To Analog Conversion: Tanauan City CollegeRalph Laurence G VisayaBelum ada peringkat
- Modulation and Coding TechniquesDokumen36 halamanModulation and Coding TechniquesJovel Jhon OpianaBelum ada peringkat
- DSP SamplingDokumen36 halamanDSP Samplingin_visible100% (1)
- Université Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Dokumen2 halamanUniversité Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Hudaa EltBelum ada peringkat
- Cours Anglais 3 2020Dokumen2 halamanCours Anglais 3 2020Hudaa EltBelum ada peringkat
- Université Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Dokumen2 halamanUniversité Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Sedik AounBelum ada peringkat
- 12 Traveling SalesmanDokumen41 halaman12 Traveling SalesmansandhanuBelum ada peringkat
- Mobile Ad Hoc Networks OverviewDokumen35 halamanMobile Ad Hoc Networks OverviewSanthosh KrishnaBelum ada peringkat
- Ether ChannelDokumen8 halamanEther ChannelSanthosh KrishnaBelum ada peringkat
- PART I Overview of Data Communications and NetworkingDokumen25 halamanPART I Overview of Data Communications and NetworkingDusmanta pradhanBelum ada peringkat
- Mobile Ad Hoc Networks OverviewDokumen35 halamanMobile Ad Hoc Networks OverviewSanthosh KrishnaBelum ada peringkat
- Explain IEEE 802.11. (UG) - (UG) : M.E (EST) /CT2/ET7203/WMC/II/20-03-2015/1 HR 30 Minutes/50 Marks /set A Part - A (5 2 10)Dokumen2 halamanExplain IEEE 802.11. (UG) - (UG) : M.E (EST) /CT2/ET7203/WMC/II/20-03-2015/1 HR 30 Minutes/50 Marks /set A Part - A (5 2 10)Santhosh KrishnaBelum ada peringkat
- AICTE ATAL FDP Proposal for <institute nameDokumen1 halamanAICTE ATAL FDP Proposal for <institute namevikasbhadoria9894Belum ada peringkat
- AICTE-AI HLTC Workshop Report (16.9.2019 To 20.9.2019)Dokumen8 halamanAICTE-AI HLTC Workshop Report (16.9.2019 To 20.9.2019)Santhosh KrishnaBelum ada peringkat
- Tamil Nadu State Council For Science and Technology: Founder Chairman, Velammal Educational TrustDokumen3 halamanTamil Nadu State Council For Science and Technology: Founder Chairman, Velammal Educational TrustSanthosh KrishnaBelum ada peringkat
- CT 1Dokumen2 halamanCT 1Santhosh KrishnaBelum ada peringkat
- 1Dokumen2 halaman1Santhosh KrishnaBelum ada peringkat
- ISBNApplicationDokumen1 halamanISBNApplicationSelvin PitchaikaniBelum ada peringkat
- Mobile Ad Hoc Networks OverviewDokumen35 halamanMobile Ad Hoc Networks OverviewSanthosh KrishnaBelum ada peringkat
- Annexure - I - Centre For Research - 24072017Dokumen216 halamanAnnexure - I - Centre For Research - 24072017Santhosh KrishnaBelum ada peringkat
- Detectors ReceiversDokumen17 halamanDetectors ReceiverssrisridivineBelum ada peringkat
- Key TCLDokumen26 halamanKey TCLSanthosh KrishnaBelum ada peringkat
- How To Install Ns-2.34 On Windows Using Vmware: Categories General 1Dokumen2 halamanHow To Install Ns-2.34 On Windows Using Vmware: Categories General 1Santhosh KrishnaBelum ada peringkat
- Black Hole Attacks in Ad Hoc Networks Using Trust Value Evaluation SchemeDokumen6 halamanBlack Hole Attacks in Ad Hoc Networks Using Trust Value Evaluation SchemeSanthosh KrishnaBelum ada peringkat
- Cs2258 Dbms ManualDokumen111 halamanCs2258 Dbms Manualnagarajan1983Belum ada peringkat
- Mobile Adhoc Networks Course OverviewDokumen1 halamanMobile Adhoc Networks Course OverviewSanthosh KrishnaBelum ada peringkat
- HSN SyllabusDokumen1 halamanHSN SyllabusSanthosh KrishnaBelum ada peringkat
- Pyrometallurgical Refining of Copper in An Anode Furnace: January 2005Dokumen13 halamanPyrometallurgical Refining of Copper in An Anode Furnace: January 2005maxi roaBelum ada peringkat
- COVID-19's Impact on Business PresentationsDokumen2 halamanCOVID-19's Impact on Business PresentationsRetmo NandoBelum ada peringkat
- Assignment-2: MCA204 Financial Accounting and ManagementDokumen6 halamanAssignment-2: MCA204 Financial Accounting and ManagementrashBelum ada peringkat
- Area Access Manager (Browser-Based Client) User GuideDokumen22 halamanArea Access Manager (Browser-Based Client) User GuideKatherineBelum ada peringkat
- Business Case - Uganda Maize Export To South SudanDokumen44 halamanBusiness Case - Uganda Maize Export To South SudanInfiniteKnowledge33% (3)
- Leg Wri FInal ExamDokumen15 halamanLeg Wri FInal ExamGillian CalpitoBelum ada peringkat
- Lorilie Muring ResumeDokumen1 halamanLorilie Muring ResumeEzekiel Jake Del MundoBelum ada peringkat
- 158 Oesmer Vs Paraisa DevDokumen1 halaman158 Oesmer Vs Paraisa DevRobelle Rizon100% (1)
- Chapter 6: Structured Query Language (SQL) : Customer Custid Custname OccupationDokumen16 halamanChapter 6: Structured Query Language (SQL) : Customer Custid Custname OccupationSarmila MahendranBelum ada peringkat
- Milwaukee 4203 838a PB CatalogaciónDokumen2 halamanMilwaukee 4203 838a PB CatalogaciónJuan carlosBelum ada peringkat
- Oop Assignment # 2 Submitted By: Hashir Khan Roll #: 22f-7465 Date: 3-3-2023Dokumen14 halamanOop Assignment # 2 Submitted By: Hashir Khan Roll #: 22f-7465 Date: 3-3-2023Hashir KhanBelum ada peringkat
- Nature of ConversionDokumen18 halamanNature of ConversionKiranBelum ada peringkat
- Complaint Handling Policy and ProceduresDokumen2 halamanComplaint Handling Policy and Proceduresjyoti singhBelum ada peringkat
- Queries With AND and OR OperatorsDokumen29 halamanQueries With AND and OR OperatorstrivaBelum ada peringkat
- RAP Submission Form, OBIDokumen3 halamanRAP Submission Form, OBIAhmed MustafaBelum ada peringkat
- Short Term Training Curriculum Handbook: General Duty AssistantDokumen49 halamanShort Term Training Curriculum Handbook: General Duty AssistantASHISH BARAWALBelum ada peringkat
- Bar Exam 2016 Suggested Answers in Political LawDokumen15 halamanBar Exam 2016 Suggested Answers in Political LawYlnne Cahlion KiwalanBelum ada peringkat
- Asian Construction Dispute Denied ReviewDokumen2 halamanAsian Construction Dispute Denied ReviewJay jogs100% (2)
- Benzon CaseDokumen3 halamanBenzon Casejulieanne07100% (1)
- Top Brand Story Bar Supervisor Jobs Chennai Apply Now Latest Fresher Experienced Bar Supervisor Jobs in Various Location July 18 2021Dokumen1 halamanTop Brand Story Bar Supervisor Jobs Chennai Apply Now Latest Fresher Experienced Bar Supervisor Jobs in Various Location July 18 2021Surya JamesBelum ada peringkat
- Project The Ant Ranch Ponzi Scheme JDDokumen7 halamanProject The Ant Ranch Ponzi Scheme JDmorraz360Belum ada peringkat
- Product Manual 36693 (Revision D, 5/2015) : PG Base AssembliesDokumen10 halamanProduct Manual 36693 (Revision D, 5/2015) : PG Base AssemblieslmarcheboutBelum ada peringkat
- Metamorphic Rocks ImagesDokumen7 halamanMetamorphic Rocks Imagesapi-289985616100% (1)
- Binaural Recording Technology: A Historical Review and Possible Future DevelopmentsDokumen22 halamanBinaural Recording Technology: A Historical Review and Possible Future DevelopmentsNery BorgesBelum ada peringkat
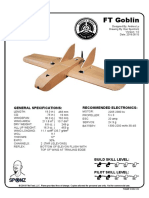
- FT Goblin Full SizeDokumen7 halamanFT Goblin Full SizeDeakon Frost100% (1)
- 6vortex 20166523361966663Dokumen4 halaman6vortex 20166523361966663Mieczysław MichalczewskiBelum ada peringkat
- Sample Property Management AgreementDokumen13 halamanSample Property Management AgreementSarah TBelum ada peringkat
- AKTA MERGER (FINAL) - MND 05 07 2020 FNLDokumen19 halamanAKTA MERGER (FINAL) - MND 05 07 2020 FNLNicoleBelum ada peringkat
- Civil Aeronautics BoardDokumen2 halamanCivil Aeronautics BoardJayson AlvaBelum ada peringkat
- Alfa Laval Complete Fittings CatalogDokumen224 halamanAlfa Laval Complete Fittings CatalogGraciele SoaresBelum ada peringkat
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityDari EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityPenilaian: 4.5 dari 5 bintang4.5/5 (13)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationDari EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationBelum ada peringkat
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Dari EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Penilaian: 4 dari 5 bintang4/5 (4)
- A Practical Guide Wireshark ForensicsDari EverandA Practical Guide Wireshark ForensicsPenilaian: 5 dari 5 bintang5/5 (4)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamDari EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamBelum ada peringkat
- CEH Certified Ethical Hacker Practice Exams, Third EditionDari EverandCEH Certified Ethical Hacker Practice Exams, Third EditionBelum ada peringkat
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamDari EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamPenilaian: 5 dari 5 bintang5/5 (1)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxDari EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxPenilaian: 4.5 dari 5 bintang4.5/5 (67)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionDari EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionPenilaian: 5 dari 5 bintang5/5 (4)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireDari EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireBelum ada peringkat
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsDari EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsBelum ada peringkat
- Amazon Web Services (AWS) Interview Questions and AnswersDari EverandAmazon Web Services (AWS) Interview Questions and AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Dari EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Belum ada peringkat
- CCST Cisco Certified Support Technician Study Guide: Networking ExamDari EverandCCST Cisco Certified Support Technician Study Guide: Networking ExamBelum ada peringkat
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Dari EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Belum ada peringkat
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeDari EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticePenilaian: 5 dari 5 bintang5/5 (1)
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationDari EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationBelum ada peringkat
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachDari EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsDari EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsBelum ada peringkat
- IP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsDari EverandIP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsBelum ada peringkat
- FTTx Networks: Technology Implementation and OperationDari EverandFTTx Networks: Technology Implementation and OperationPenilaian: 5 dari 5 bintang5/5 (1)