Anda mungkin juga menyukai
- Ejemplo de Calculo de Maxima DemandaDokumen2 halamanEjemplo de Calculo de Maxima Demandajose daniel capos herediaBelum ada peringkat
- Silabo 106031 Proyecto de Tesis I PDFDokumen5 halamanSilabo 106031 Proyecto de Tesis I PDFjose daniel capos herediaBelum ada peringkat
- Sistemas Producción EsbeltaDokumen20 halamanSistemas Producción Esbeltajose daniel capos herediaBelum ada peringkat
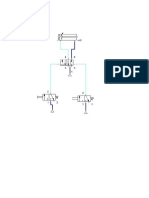
- Ejericios de NeumaticaDokumen5 halamanEjericios de Neumaticajose daniel capos herediaBelum ada peringkat
- Tarea Del Informe CientíficoDokumen3 halamanTarea Del Informe Científicojose daniel capos herediaBelum ada peringkat
- A 12 CM B 8 CM C 6 CM: Área Lateral (A) Área Total (A) Volumen (V)Dokumen3 halamanA 12 CM B 8 CM C 6 CM: Área Lateral (A) Área Total (A) Volumen (V)jose daniel capos herediaBelum ada peringkat
- Articulo 1. Autor J. Mejia PDFDokumen15 halamanArticulo 1. Autor J. Mejia PDFjose daniel capos herediaBelum ada peringkat
- Tarea Del Informe CientíficoDokumen3 halamanTarea Del Informe Científicojose daniel capos herediaBelum ada peringkat
- Articulo 1. Autor J. Mejia PDFDokumen15 halamanArticulo 1. Autor J. Mejia PDFjose daniel capos herediaBelum ada peringkat
- Analisis de Cálculo de CombustiónDokumen6 halamanAnalisis de Cálculo de Combustiónjose daniel capos herediaBelum ada peringkat
- Semana 4-5 IntroduccionDokumen28 halamanSemana 4-5 Introduccionjose daniel capos herediaBelum ada peringkat
- Informe de TurbogrupoDokumen5 halamanInforme de Turbogrupojose daniel capos herediaBelum ada peringkat
- OBJETIVOSDokumen20 halamanOBJETIVOSjose daniel capos herediaBelum ada peringkat
- PracticaDokumen3 halamanPracticajose daniel capos herediaBelum ada peringkat
- Trazado Caldereria PDFDokumen14 halamanTrazado Caldereria PDFCesar86% (37)
- Deposición Quimica de VaporDokumen5 halamanDeposición Quimica de Vaporjose daniel capos herediaBelum ada peringkat
- Pieza 3Dokumen1 halamanPieza 3jose daniel capos herediaBelum ada peringkat
- Deposición Quimica de VaporDokumen5 halamanDeposición Quimica de Vaporjose daniel capos herediaBelum ada peringkat
- Poieza de Extractor HomocinèticoDokumen1 halamanPoieza de Extractor Homocinèticojose daniel capos heredia100% (1)
- Ensamblaje2 PDFDokumen1 halamanEnsamblaje2 PDFjose daniel capos herediaBelum ada peringkat
- Vectores UnitariosDokumen2 halamanVectores UnitariosFrank Rodriguez CalleBelum ada peringkat
- Extractor de juntas homocinéticas detallesDokumen1 halamanExtractor de juntas homocinéticas detallesjose daniel capos herediaBelum ada peringkat
- Deposición Química de VaporDokumen7 halamanDeposición Química de VaporGerald Romero Pinto100% (1)
- Ciclón 2 IntercambiadorDokumen1 halamanCiclón 2 Intercambiadorjose daniel capos herediaBelum ada peringkat
- Factor dinámico Kv para engranes: ecuaciones y gráficaDokumen3 halamanFactor dinámico Kv para engranes: ecuaciones y gráficajose daniel capos herediaBelum ada peringkat
- Formulacion PDFDokumen76 halamanFormulacion PDFLizbeth CondeBelum ada peringkat
- Term Odin A MicaDokumen16 halamanTerm Odin A Micaલિસા એન્ડ્રીયા એન્ડ્રીયાBelum ada peringkat
- Factor dinámico Kv para engranes: ecuaciones y gráficaDokumen3 halamanFactor dinámico Kv para engranes: ecuaciones y gráficajose daniel capos herediaBelum ada peringkat
- Factor Dinámico (K - V)Dokumen6 halamanFactor Dinámico (K - V)jose daniel capos herediaBelum ada peringkat
- Leyes de Newton Carolina PresentacionDokumen8 halamanLeyes de Newton Carolina PresentacionWendy BetancourBelum ada peringkat
- HM150.05 - Presión Hidrostática en LíquidosDokumen43 halamanHM150.05 - Presión Hidrostática en LíquidosSaraCastaño0% (1)
- CyD ING-U1-Cinematica de La PartículaDokumen133 halamanCyD ING-U1-Cinematica de La PartículajorgeBelum ada peringkat
- Trabajo - Monografico - Columnas y Vigas - Estructuras de AceroDokumen27 halamanTrabajo - Monografico - Columnas y Vigas - Estructuras de AceroDany Jhoni Delgadillo HuaranccaBelum ada peringkat
- Deadpool 2Dokumen3 halamanDeadpool 2Marlencita ChoguixBelum ada peringkat
- Proyecto EstaticaDokumen8 halamanProyecto EstaticaGonzalo Alonso Llerena AriasBelum ada peringkat
- Hidrodinámica y ecuación de continuidadDokumen4 halamanHidrodinámica y ecuación de continuidadfredy alexander acevedo cardonaBelum ada peringkat
- Vigas y análisis matemáticoDokumen4 halamanVigas y análisis matemáticoaleks21Belum ada peringkat
- Mecanica de Los Fluidos Por Kelly RodriguezDokumen17 halamanMecanica de Los Fluidos Por Kelly RodriguezJesus FloresBelum ada peringkat
- Inducción magnética y leyes de Faraday y LenzDokumen5 halamanInducción magnética y leyes de Faraday y LenzHirving Sumaran LayzaBelum ada peringkat
- 1-. Taller de Electro 1A UTS 2-2014Dokumen11 halaman1-. Taller de Electro 1A UTS 2-2014Juan Pablo GutierrezBelum ada peringkat
- An Uni Fi VC S21Dokumen9 halamanAn Uni Fi VC S21messiBelum ada peringkat
- IntercambiadoresDeCalor DiseñoyCalculosDokumen6 halamanIntercambiadoresDeCalor DiseñoyCalculosAgustin Milla GonzalezBelum ada peringkat
- Balotario Fisica 4to BimestreDokumen13 halamanBalotario Fisica 4to Bimestreandrexito22Belum ada peringkat
- Si Se Encuentran 2 o Más Exámenes Idénticos Se Anularán AmbosDokumen4 halamanSi Se Encuentran 2 o Más Exámenes Idénticos Se Anularán AmbosKamijō Tōma100% (1)
- Termodinamica FisicaDokumen10 halamanTermodinamica Fisicadalex_tauro93100% (1)
- 05-Seccion 5 Estructura de Hormigon 2° ParteDokumen74 halaman05-Seccion 5 Estructura de Hormigon 2° ParteJose Antonio Paredes VeraBelum ada peringkat
- Semana 3 Ingenierias - Física - SoluciónDokumen11 halamanSemana 3 Ingenierias - Física - Soluciónbmmmas127Belum ada peringkat
- Superposicion Beer 0001Dokumen5 halamanSuperposicion Beer 0001KevBelum ada peringkat
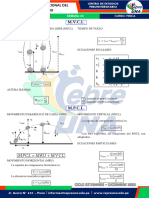
- Movimiento circular uniformeDokumen3 halamanMovimiento circular uniformeJuan Carlos Cesaro SorianoBelum ada peringkat
- Informe Laboratorio Movimientoto Uniforme Rectilineo DesaceleradoDokumen4 halamanInforme Laboratorio Movimientoto Uniforme Rectilineo DesaceleradogioBelum ada peringkat
- Diseño - Molino de MartillosDokumen6 halamanDiseño - Molino de MartillosDaark KniightBelum ada peringkat
- Guia de DinamicaDokumen8 halamanGuia de Dinamicaxray123zzzBelum ada peringkat
- Ley de GaussDokumen37 halamanLey de Gaussalexander pumaBelum ada peringkat
- Tarea 02 - VectoresDokumen5 halamanTarea 02 - VectoresEduardo AranibarBelum ada peringkat
- Informe de Laboratorio 4Dokumen15 halamanInforme de Laboratorio 4Andres BetancourtBelum ada peringkat
- Silabus FisicaDokumen6 halamanSilabus FisicaGray D L LeoBelum ada peringkat
- LAB - 6 - Ondas Estacionarias en Una CuerdaDokumen10 halamanLAB - 6 - Ondas Estacionarias en Una CuerdaGT Guido83% (6)
- Informe de Pendulo SimpleDokumen4 halamanInforme de Pendulo SimplecristianBelum ada peringkat
- 7B 2Dokumen1 halaman7B 2ArturoBaldéonBelum ada peringkat