Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- 1.17 - Surreptitious Software Obfuscation, Watermarking, and Tamperproofing For Software ProtectionDokumen1.041 halaman1.17 - Surreptitious Software Obfuscation, Watermarking, and Tamperproofing For Software ProtectionGabriel DiasBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- TRONXY P802EA Installation Guide v.03Dokumen29 halamanTRONXY P802EA Installation Guide v.03Jessica Ross100% (1)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- On DC/DC Voltage Buck Converter Control Improvement Through The QFT ApproachDokumen8 halamanOn DC/DC Voltage Buck Converter Control Improvement Through The QFT ApproachJessica RossBelum ada peringkat
- Controller Design For Buck Converter Step-by-Step Approach: Swapna ManurkarDokumen3 halamanController Design For Buck Converter Step-by-Step Approach: Swapna ManurkarJessica RossBelum ada peringkat
- Implementing Sliding Mode Control For Buck Converter: Ahmed, Kuisma, Tolsa, SilventoinenDokumen4 halamanImplementing Sliding Mode Control For Buck Converter: Ahmed, Kuisma, Tolsa, SilventoinenJessica RossBelum ada peringkat
- On The Practical Design of A Sliding Mode Voltage Controlled Buck ConverterDokumen13 halamanOn The Practical Design of A Sliding Mode Voltage Controlled Buck ConverterJessica RossBelum ada peringkat
- 1999 IFAC 14th Triennial World Congn.:ss, Beijing. China: Elare Oyj, P.O.BoxDokumen6 halaman1999 IFAC 14th Triennial World Congn.:ss, Beijing. China: Elare Oyj, P.O.BoxJessica RossBelum ada peringkat
- Implementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicDokumen4 halamanImplementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicJessica RossBelum ada peringkat
- Ug897 Vivado Sysgen UserDokumen226 halamanUg897 Vivado Sysgen UserJessica RossBelum ada peringkat
- F C F N A B S: Uzzy Ontrol OR Onlinearball ND EAM YstemDokumen8 halamanF C F N A B S: Uzzy Ontrol OR Onlinearball ND EAM YstemJessica RossBelum ada peringkat
- BW500 ManualDokumen315 halamanBW500 ManualJessica RossBelum ada peringkat
- BB01 User ManualDokumen21 halamanBB01 User ManualJessica RossBelum ada peringkat
- Ball and Beam: Design and ControlDokumen3 halamanBall and Beam: Design and ControlJessica RossBelum ada peringkat
- Design and Control of Pid Controlled Ball and Beam SystemDokumen6 halamanDesign and Control of Pid Controlled Ball and Beam SystemJessica RossBelum ada peringkat
- Nonlinear PD Regulation For Ball and Beam System: Wen YuDokumen15 halamanNonlinear PD Regulation For Ball and Beam System: Wen YuJessica RossBelum ada peringkat
- P802 Automatic Leveling Debug Guide V2Dokumen5 halamanP802 Automatic Leveling Debug Guide V2Jessica Ross100% (1)
- Mathematical Modelling of The Mass-Spring-Damper System - A Fractional Calculus ApproachDokumen7 halamanMathematical Modelling of The Mass-Spring-Damper System - A Fractional Calculus ApproachJessica RossBelum ada peringkat
- Experiment: 3: Metal Bar L (2) LDokumen6 halamanExperiment: 3: Metal Bar L (2) LJessica RossBelum ada peringkat
- 3DC Real Light 24HDRi Vol03Dokumen27 halaman3DC Real Light 24HDRi Vol03AntezanaFernandoBelum ada peringkat
- Yr 6 Maths G-6 E P-I PDFDokumen168 halamanYr 6 Maths G-6 E P-I PDFdina171279Belum ada peringkat
- Whinner y 1990Dokumen5 halamanWhinner y 1990LGBelum ada peringkat
- 13 EGWDC 2012 CompresscoDokumen17 halaman13 EGWDC 2012 CompresscoVeky Pamintu100% (1)
- Configuring Routing by Using Routing and Remote AccessDokumen31 halamanConfiguring Routing by Using Routing and Remote AccessLacus ClyneBelum ada peringkat
- Electrosurgical Text HandboockDokumen94 halamanElectrosurgical Text HandboockThéu Castro100% (1)
- Stacks - Quesues and DequesDokumen23 halamanStacks - Quesues and DequesAbdallateef ShohdyBelum ada peringkat
- Seborg Chapter 1Dokumen3 halamanSeborg Chapter 1maykesguerraBelum ada peringkat
- Design Method of 6-Element Boundary Gain For LLC Resonant Converter of Electric VehicleDokumen11 halamanDesign Method of 6-Element Boundary Gain For LLC Resonant Converter of Electric VehicleSh M AaqibBelum ada peringkat
- Standard Test Method For Density and Void Content of Freshly Mixed Pervious ConcreteDokumen4 halamanStandard Test Method For Density and Void Content of Freshly Mixed Pervious ConcreteManaswini VadlamaniBelum ada peringkat
- Bouveault-Blanc Ester ReductionDokumen3 halamanBouveault-Blanc Ester ReductionAriel GarciaBelum ada peringkat
- Spice-Simulation Using LTspice Part 1Dokumen76 halamanSpice-Simulation Using LTspice Part 1suzsoltBelum ada peringkat
- 1.basic Electrical Engineering Lecture Part-1Dokumen17 halaman1.basic Electrical Engineering Lecture Part-1jimvalenciaBelum ada peringkat
- Import Data From Excel To Sap TableDokumen11 halamanImport Data From Excel To Sap TableSajjadBelum ada peringkat
- Science 3 PDFDokumen12 halamanScience 3 PDFJelyn CandoBelum ada peringkat
- Pseudocode Is A Technique Used To Describe The Distinct Steps of An Algorithm in ADokumen3 halamanPseudocode Is A Technique Used To Describe The Distinct Steps of An Algorithm in AChristian Doson EstilloreBelum ada peringkat
- Theories and Methods of Two Way Slab Design-5-8-2017Dokumen3 halamanTheories and Methods of Two Way Slab Design-5-8-2017amerta 4320Belum ada peringkat
- AC Induction Motors - How AC Motors WorkDokumen10 halamanAC Induction Motors - How AC Motors WorkBraulio IrrutiaBelum ada peringkat
- WJMDokumen6 halamanWJMAldianivo Nur FaizBelum ada peringkat
- 3 Statement Model: Strictly ConfidentialDokumen13 halaman3 Statement Model: Strictly ConfidentialLalit mohan PradhanBelum ada peringkat
- Astm Parte 5Dokumen5 halamanAstm Parte 5Jimmy David Espinoza MejiaBelum ada peringkat
- Maharashtra State Board of Technical Education (Autonomous) (ISO/IEC - 27001 - 2005 Certified) Winter - 2022 Examination Model Answer Subject: 22619Dokumen22 halamanMaharashtra State Board of Technical Education (Autonomous) (ISO/IEC - 27001 - 2005 Certified) Winter - 2022 Examination Model Answer Subject: 22619Pratiksha JadhavBelum ada peringkat
- Flue Gas Analysis in IndustryDokumen150 halamanFlue Gas Analysis in Industryblack_knight728Belum ada peringkat
- Thermodynamics NotesDokumen2 halamanThermodynamics Notesjpu_48Belum ada peringkat
- Full Test Bank For Understanding Pathophysiology 6Th Edition by Huether PDF Docx Full Chapter ChapterDokumen36 halamanFull Test Bank For Understanding Pathophysiology 6Th Edition by Huether PDF Docx Full Chapter Chapterexequycheluract6oi100% (9)
- Adelio Lattuada TL10AV & TL10Dokumen7 halamanAdelio Lattuada TL10AV & TL10yaser radBelum ada peringkat
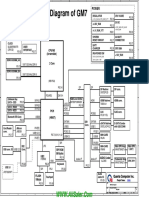
- Dell XPS 17 Quanta GM7 Rev D SchematicsDokumen39 halamanDell XPS 17 Quanta GM7 Rev D SchematicsvcompumatikBelum ada peringkat
- LAB 7 - Getting Started With Google BigQueryDokumen10 halamanLAB 7 - Getting Started With Google BigQueryRama VBelum ada peringkat
- SOPRANO TIM SMTP Interface Developers GuideDokumen43 halamanSOPRANO TIM SMTP Interface Developers GuidenettellectBelum ada peringkat