Anda mungkin juga menyukai
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsDari EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsBelum ada peringkat
- Hydraulique Industrielle - Cours PDFDokumen103 halamanHydraulique Industrielle - Cours PDFMohamedAyoub60% (5)
- GENIE MECANIQUE. Semestre 5 PDFDokumen105 halamanGENIE MECANIQUE. Semestre 5 PDFamr100% (6)
- Exercices MEF PDFDokumen3 halamanExercices MEF PDFgehikaw67% (3)
- CNC Tournage FraisageDokumen109 halamanCNC Tournage FraisageNaoufel FARES100% (1)
- Formation CATIAV5 CeCDokumen405 halamanFormation CATIAV5 CeCAdima Said100% (1)
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Dari EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Belum ada peringkat
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !Dari EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !Belum ada peringkat
- Manuel D'utilisation de L'imprimante 3D Creality Ender-3 - Manuels +Dokumen46 halamanManuel D'utilisation de L'imprimante 3D Creality Ender-3 - Manuels +Anonymous 9qKdViDP40% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesDari EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesBelum ada peringkat
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoDari EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoBelum ada peringkat
- Projet 3D IBP. Conception D Une Imprimante 3D Pour Moins de 250Dokumen38 halamanProjet 3D IBP. Conception D Une Imprimante 3D Pour Moins de 250Hadi Ben SaïdBelum ada peringkat
- Cours de MOCNDokumen71 halamanCours de MOCNHouari Pachika91% (11)
- Cours Prog - 2 PDFDokumen120 halamanCours Prog - 2 PDFmahergarfa90% (10)
- Projet PalanDokumen84 halamanProjet PalanYassire SamirBelum ada peringkat
- Conception D'une Machine de Po - Bouchra KHILOU - 4717Dokumen42 halamanConception D'une Machine de Po - Bouchra KHILOU - 4717Adil EL AttarBelum ada peringkat
- Cours AcoustiqueDokumen37 halamanCours Acoustiqueghaghalee100% (1)
- Principes de L'utilisation de SolidWorks Pièces Et AssemblagesDokumen487 halamanPrincipes de L'utilisation de SolidWorks Pièces Et AssemblagesOussama Achouillosse0% (1)
- CNCDokumen70 halamanCNCMohamedAyoub100% (2)
- Fusion 360 Projets de conception CAO Partie I: 10 projets de conception CAO de niveau facile à moyen expliqués pour les utilisateurs avancésDari EverandFusion 360 Projets de conception CAO Partie I: 10 projets de conception CAO de niveau facile à moyen expliqués pour les utilisateurs avancésBelum ada peringkat
- Positions de SoudageDokumen1 halamanPositions de SoudageFares Hayder100% (6)
- Circuit de ChargeDokumen10 halamanCircuit de Chargearimi87100% (1)
- Chapitre 3 Programmation Iso PDFDokumen17 halamanChapitre 3 Programmation Iso PDFMohamedAyoub0% (1)
- Pompe A ChaleurDokumen8 halamanPompe A ChaleurZak Keroum100% (1)
- Pile À Combustible Domestique: Petit générateur pour l'électricité et l'eau chaufféeDari EverandPile À Combustible Domestique: Petit générateur pour l'électricité et l'eau chaufféeBelum ada peringkat
- Cour de Chimie en SolutionDokumen20 halamanCour de Chimie en SolutionIhsan Mokhlisse100% (28)
- M19 Marocetude - Com Representation de Pieces Mecaniques en Dessin Industriel-FM-TSMFMDokumen227 halamanM19 Marocetude - Com Representation de Pieces Mecaniques en Dessin Industriel-FM-TSMFMSidi Ali0% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysDari EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysBelum ada peringkat
- Ugv PDFDokumen30 halamanUgv PDFKarim ZineBelum ada peringkat
- Realisation Moules Injection PlastiqueDokumen15 halamanRealisation Moules Injection Plastiquemaino100% (4)
- Memoire de Fin D'étudeDokumen65 halamanMemoire de Fin D'étudeabd mbtBelum ada peringkat
- 1 Conception Des Structures en AcierDokumen47 halaman1 Conception Des Structures en AcierHajar OhmadBelum ada peringkat
- Dimensionnement PDFDokumen30 halamanDimensionnement PDFnassim100% (2)
- Conception D'une Machine Outil - ES-SAIDI Abdelhak - 2991 PDFDokumen104 halamanConception D'une Machine Outil - ES-SAIDI Abdelhak - 2991 PDFJawher Salem50% (2)
- 2610f Production A Commande Numerique FraisageDokumen16 halaman2610f Production A Commande Numerique FraisageBoutef El Hachemi0% (1)
- Rapport AbaqusDokumen27 halamanRapport Abaquselgheryb_choukri100% (1)
- Chapitre 3 Programmation IsoDokumen25 halamanChapitre 3 Programmation IsoMohamedAyoubBelum ada peringkat
- Bras Manipulateur PDFDokumen17 halamanBras Manipulateur PDFOMARKHAN21Belum ada peringkat
- M13Programmation Reglage Et Conduite Des MOCN Version 1Dokumen212 halamanM13Programmation Reglage Et Conduite Des MOCN Version 1Soufiane TouilBelum ada peringkat
- Robert Linssen - Science Et Spiritualité Entretien 1986Dokumen8 halamanRobert Linssen - Science Et Spiritualité Entretien 1986helabzBelum ada peringkat
- Matériaux TropicauxDokumen63 halamanMatériaux TropicauxAbdoulnassirou Bassongou100% (3)
- Mécanique de Précision - Travaux Pratiques D'usinage Sur Une Fraiseuse CNCDokumen354 halamanMécanique de Précision - Travaux Pratiques D'usinage Sur Une Fraiseuse CNCMohamedAyoub100% (1)
- Mécanique de Précision - Travaux Pratiques D'usinage Sur Une Fraiseuse CNCDokumen354 halamanMécanique de Précision - Travaux Pratiques D'usinage Sur Une Fraiseuse CNCMohamedAyoub100% (1)
- CH 4 Gindus Généralités MocnDokumen41 halamanCH 4 Gindus Généralités MocnMeryem JanatiBelum ada peringkat
- Corrigé Mémoire Finale-ConvertiDokumen82 halamanCorrigé Mémoire Finale-ConvertiMohamed DoumaBelum ada peringkat
- Conception D Une Chaise Electrique MonteDokumen81 halamanConception D Une Chaise Electrique MonteFettal AbdelilahBelum ada peringkat
- Initiation CNDokumen22 halamanInitiation CNMecanichal SteelBelum ada peringkat
- Initiation CNDokumen22 halamanInitiation CNMecanichal SteelBelum ada peringkat
- Initiation CNDokumen22 halamanInitiation CNMecanichal SteelBelum ada peringkat
- Calibrage Mach3Dokumen8 halamanCalibrage Mach3qqazertyBelum ada peringkat
- Conception Par La Cao Des Parties Fixes D Une EolienneDokumen82 halamanConception Par La Cao Des Parties Fixes D Une EolienneZantar Abdelhaq67% (3)
- PROJET Bras RobotiseDokumen26 halamanPROJET Bras RobotiseFAROK businessBelum ada peringkat
- G2-Vacon AC Drives Advanced - Revision2 FRDokumen84 halamanG2-Vacon AC Drives Advanced - Revision2 FRMohammed Amine KenedBelum ada peringkat
- Memoire 171735082444 & 171735092115Dokumen69 halamanMemoire 171735082444 & 171735092115Manal QuorsaneBelum ada peringkat
- Prog ProductiqueDokumen159 halamanProg ProductiqueMakrem Cherif100% (1)
- Exposé PfeDokumen33 halamanExposé PfeAhmadiAnouarBelum ada peringkat
- Plan Fraiseuse FRDokumen125 halamanPlan Fraiseuse FRThierry LAMBOTTEBelum ada peringkat
- Analyse de La Fabrication D'un - EL BACHARI Hoummad - 484Dokumen50 halamanAnalyse de La Fabrication D'un - EL BACHARI Hoummad - 484essaid100% (1)
- M03 Marocetude - Com Analyse de Fabrication Et Gammes D Usinage-partie1-FM-TSMFMDokumen70 halamanM03 Marocetude - Com Analyse de Fabrication Et Gammes D Usinage-partie1-FM-TSMFMBrahim Kh50% (2)
- Département de Génie Mécanique MÉMOIRE.Dokumen110 halamanDépartement de Génie Mécanique MÉMOIRE.btkmouradBelum ada peringkat
- BTS Conception Realisation CarrosserieDokumen210 halamanBTS Conception Realisation CarrosserieLuiz Carlos VasconcelosBelum ada peringkat
- Dimensionner Un Circuit Hydraulique Pour Une Presse - 40T (Feuille de Calcul)Dokumen10 halamanDimensionner Un Circuit Hydraulique Pour Une Presse - 40T (Feuille de Calcul)lynda jerbiaBelum ada peringkat
- Techniques de Commande DTC-SVM Appliquées À La Machine AsynchronDokumen69 halamanTechniques de Commande DTC-SVM Appliquées À La Machine AsynchronAbd Elwadood YahiaouiBelum ada peringkat
- Bougoffa Ramez Mohamed LamineDokumen87 halamanBougoffa Ramez Mohamed LamineRodolphe SounouBelum ada peringkat
- UGVDokumen30 halamanUGVBoutef El Hachemi100% (1)
- Les Douille À Billes PDFDokumen50 halamanLes Douille À Billes PDFNadia DridiBelum ada peringkat
- Etude Et Conception D'un BotenierDokumen101 halamanEtude Et Conception D'un BotenierMissaoui LtayefBelum ada peringkat
- Introduction À La Fabrication MécaniqueDokumen14 halamanIntroduction À La Fabrication MécaniqueAnonymous 9qKdViDP4Belum ada peringkat
- Dimensionnement Sys D'entrainement PDFDokumen40 halamanDimensionnement Sys D'entrainement PDFichrakBelum ada peringkat
- Red PDFDokumen46 halamanRed PDFkarim100% (1)
- SmainiDjamel BenKadiRDokumen77 halamanSmainiDjamel BenKadiRnonoBelum ada peringkat
- Cours Cao IiDokumen61 halamanCours Cao IiO ZBelum ada peringkat
- Variateur de Vitesse A CourroieDokumen4 halamanVariateur de Vitesse A Courroiewoulkan100% (1)
- Chapitre 3 Calcul ArbreDokumen8 halamanChapitre 3 Calcul ArbreYousif AliBelum ada peringkat
- Ugv AppDokumen2 halamanUgv AppAbdelilah El GmairiBelum ada peringkat
- DLS 03 FR PDFDokumen30 halamanDLS 03 FR PDFhepcomotionBelum ada peringkat
- Corr Techn CNC 2014Dokumen8 halamanCorr Techn CNC 2014Parc ElyesBelum ada peringkat
- CM - Variateurs de Vitesse MecaniquesDokumen29 halamanCM - Variateurs de Vitesse Mecaniquestarek05950% (2)
- Regulation Numerique TempDokumen36 halamanRegulation Numerique TempDK KDBelum ada peringkat
- Cfao 2013-2014 PDFDokumen71 halamanCfao 2013-2014 PDFAl Cas75% (4)
- Synthese Sur Les Moteurs Electriques (VF) Nyebe Ndongo Jeanne MichelleDokumen34 halamanSynthese Sur Les Moteurs Electriques (VF) Nyebe Ndongo Jeanne MichelleMichelle NyebeBelum ada peringkat
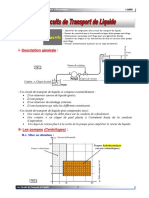
- Chap2 Les Circuits de Transport de LiquideDokumen17 halamanChap2 Les Circuits de Transport de LiquideAla Massoudi100% (1)
- Dossier Sponsoring 2013 2014 EnsemDokumen22 halamanDossier Sponsoring 2013 2014 EnsemMichael GreenBelum ada peringkat
- Les Origines Et Systèmes de Coordonnées - Tutoriels Makerslide MachinesDokumen6 halamanLes Origines Et Systèmes de Coordonnées - Tutoriels Makerslide MachinesMohamedAyoubBelum ada peringkat
- La Commande NumeriqueDokumen18 halamanLa Commande NumeriqueqaadilBelum ada peringkat
- Definitions Origines Et Vecteurs 02Dokumen1 halamanDefinitions Origines Et Vecteurs 02MohamedAyoubBelum ada peringkat
- Cours-Codeurs-moteurs I4811 v070 PDFDokumen5 halamanCours-Codeurs-moteurs I4811 v070 PDFMohamedAyoubBelum ada peringkat
- Cycles Preprogrammes ProfDokumen12 halamanCycles Preprogrammes Prof0001fredBelum ada peringkat
- Fonctionnement MOCN PDFDokumen16 halamanFonctionnement MOCN PDFMohamedAyoubBelum ada peringkat
- Mecan M 2012 PDFDokumen102 halamanMecan M 2012 PDFMohamedAyoubBelum ada peringkat
- My WebsiteTruong2008 Chuyển Đổi Www Mastercam Webs ComDokumen17 halamanMy WebsiteTruong2008 Chuyển Đổi Www Mastercam Webs ComMohamedAyoubBelum ada peringkat
- Mocn 2 PDFDokumen46 halamanMocn 2 PDFBentchikou MohBelum ada peringkat
- Cours-Codeurs-moteurs I4811 v070 PDFDokumen5 halamanCours-Codeurs-moteurs I4811 v070 PDFMohamedAyoubBelum ada peringkat
- CN 1Dokumen8 halamanCN 1Hozepha Bhai BarmalBelum ada peringkat
- La Commande NumeriqueDokumen18 halamanLa Commande NumeriqueqaadilBelum ada peringkat
- CHM 144 ?Dokumen107 halamanCHM 144 ?wilfriedpokeboyBelum ada peringkat
- Saadallah Houssam EddineDokumen62 halamanSaadallah Houssam EddineMãrÿ ŌûmåBelum ada peringkat
- 1616054016bosch Rexroth 4ws e 2e Valvola Valve rf29583Dokumen20 halaman1616054016bosch Rexroth 4ws e 2e Valvola Valve rf29583guevbaBelum ada peringkat
- Effet Kirlian... - Afis - Association Française Pour L'information ScientifiqueDokumen8 halamanEffet Kirlian... - Afis - Association Française Pour L'information Scientifiquebenben31100% (1)
- TD10 - Accouplemnt Et JointDokumen28 halamanTD10 - Accouplemnt Et JointBOUAZIZBelum ada peringkat
- Son TilaDokumen51 halamanSon TilaYacoudimaBelum ada peringkat
- Analyse3 PDFDokumen89 halamanAnalyse3 PDFsamiraBelum ada peringkat
- Isométrie 1Dokumen2 halamanIsométrie 1gharsyessmineBelum ada peringkat
- Principes de Régulation en Boucle Fermée - Approche en Mode Glissant en CourantDokumen12 halamanPrincipes de Régulation en Boucle Fermée - Approche en Mode Glissant en CourantXiaoShan LIUBelum ada peringkat
- RandriantsihetySolofomaheryB ESPA ING 14Dokumen174 halamanRandriantsihetySolofomaheryB ESPA ING 14Mounir KermoussBelum ada peringkat
- Manometro 0-100mbarDokumen2 halamanManometro 0-100mbarjeysonsaBelum ada peringkat
- Inbound 7631933295959326832Dokumen16 halamanInbound 7631933295959326832Hôûs SêmëBelum ada peringkat
- Operations Unitaires PlanDokumen19 halamanOperations Unitaires Plankolabot90% (10)
- Catalogue Emea Industrie FR 4 13Dokumen224 halamanCatalogue Emea Industrie FR 4 13benzBelum ada peringkat
- Coloration de Graphe PDFDokumen2 halamanColoration de Graphe PDFKarenBelum ada peringkat
- C7 PDFDokumen28 halamanC7 PDFmedBelum ada peringkat
- Assemblages Et Tribo - Assemblages MécaniquesDokumen12 halamanAssemblages Et Tribo - Assemblages MécaniquesdjalikadjouBelum ada peringkat
- THGR 2016 Td2 CorrigeDokumen3 halamanTHGR 2016 Td2 Corrigebouhrara faroukBelum ada peringkat
- Cours CinematiqueDokumen19 halamanCours Cinematiqueoussama22Belum ada peringkat
- RecurDokumen2 halamanRecurIhsan MokhlisseBelum ada peringkat
- BTI-012 Alimentation Souterraine C2010Dokumen21 halamanBTI-012 Alimentation Souterraine C2010Joshua OneillBelum ada peringkat
- Les EmulsionsDokumen10 halamanLes Emulsionsshinichi62kudoBelum ada peringkat