Anda mungkin juga menyukai
- Prueba de DuncanDokumen5 halamanPrueba de DuncanRodcomsar100% (1)
- PROBLEMARIO Unidad 3Dokumen1 halamanPROBLEMARIO Unidad 3RodcomsarBelum ada peringkat
- U3 Series de Tiempo EjerciciosDokumen23 halamanU3 Series de Tiempo EjerciciosRodcomsarBelum ada peringkat
- Diario de AprendizajeDokumen1 halamanDiario de AprendizajeRodcomsarBelum ada peringkat
- Problemario U1Dokumen4 halamanProblemario U1RodcomsarBelum ada peringkat
- U1 Regresion Lineal Simple - 5 PasosDokumen10 halamanU1 Regresion Lineal Simple - 5 PasosRodcomsarBelum ada peringkat
- Medidas de DispersionDokumen2 halamanMedidas de DispersionRodcomsarBelum ada peringkat
- 2-2 Punto - EquilibrioDokumen2 halaman2-2 Punto - EquilibrioRodcomsarBelum ada peringkat
- 2-2 Punto - EquilibrioDokumen2 halaman2-2 Punto - EquilibrioRodcomsarBelum ada peringkat
- Problemario U2Dokumen4 halamanProblemario U2RodcomsarBelum ada peringkat
- Unidad 3 Aplicaciones de La IntegralDokumen1 halamanUnidad 3 Aplicaciones de La IntegralRodcomsarBelum ada peringkat
- Unidad 1Dokumen112 halamanUnidad 1RodcomsarBelum ada peringkat
- Ejercicios Resueltos VolumenesDokumen8 halamanEjercicios Resueltos Volumenesarcelia garcia100% (1)
- Ejercicios Resueltos AreasDokumen7 halamanEjercicios Resueltos AreasMaou ÆtherBelum ada peringkat
- DiferencialesDokumen2 halamanDiferencialesRodcomsar50% (2)
- Problemario U4 PDFDokumen1 halamanProblemario U4 PDFRodcomsarBelum ada peringkat
- Unidad 4Dokumen6 halamanUnidad 4RodcomsarBelum ada peringkat
- 1.8 Teorema Fundamental Del CalculoDokumen3 halaman1.8 Teorema Fundamental Del CalculoRodcomsarBelum ada peringkat
- Problemario Unidad 2Dokumen3 halamanProblemario Unidad 2RodcomsarBelum ada peringkat
- U2 Regresion Lineal Multiple Parte 2Dokumen54 halamanU2 Regresion Lineal Multiple Parte 2RodcomsarBelum ada peringkat
- ExperimentoDokumen1 halamanExperimentoRodcomsarBelum ada peringkat
- Unidad 1Dokumen112 halamanUnidad 1RodcomsarBelum ada peringkat
- Unidad 1 Estadistica Descriptiva PDFDokumen39 halamanUnidad 1 Estadistica Descriptiva PDFRodcomsarBelum ada peringkat
- Analisis de Serie de TiempoDokumen6 halamanAnalisis de Serie de TiempoRodcomsarBelum ada peringkat
- Problemario Unidad 2Dokumen2 halamanProblemario Unidad 2RodcomsarBelum ada peringkat
- Unidad 1.1 - 1.2Dokumen5 halamanUnidad 1.1 - 1.2RodcomsarBelum ada peringkat
- Antecedent EsDokumen3 halamanAntecedent EsRodcomsarBelum ada peringkat
- Bryan Salazar LópezDokumen3 halamanBryan Salazar LópezRodcomsarBelum ada peringkat
- Ejercicios IcDokumen1 halamanEjercicios IcRodcomsarBelum ada peringkat
- Breve Historia de La Administración de La ProducciónDokumen9 halamanBreve Historia de La Administración de La ProducciónRodcomsarBelum ada peringkat
- Procesos Adaptativos y Mecanismos MentalesDokumen50 halamanProcesos Adaptativos y Mecanismos MentalesWSteven DiazBelum ada peringkat
- V64-V65 Esp 1 PDFDokumen8 halamanV64-V65 Esp 1 PDFRafael BrunoBelum ada peringkat
- Grandes Puentes y Su Historia PDFDokumen41 halamanGrandes Puentes y Su Historia PDFCarlos TAPIA CABRERABelum ada peringkat
- Geologia y Estratigrafia de ManaguaDokumen12 halamanGeologia y Estratigrafia de ManaguaGermanCanalesBelum ada peringkat
- Silabo de Mecanica de La FracturaDokumen4 halamanSilabo de Mecanica de La FracturaHERMAN JR.Belum ada peringkat
- Bloque 1. Cuestiones Mecanismos 1.Dokumen24 halamanBloque 1. Cuestiones Mecanismos 1.guillermovillazanBelum ada peringkat
- Yahvé/Allah/Adonai vs. Olodumare:La Raíz Del Problema.Dokumen20 halamanYahvé/Allah/Adonai vs. Olodumare:La Raíz Del Problema.AguiladIfaFoundationBelum ada peringkat
- Las Tensiones NaturalesDokumen40 halamanLas Tensiones NaturalesManuel Antonio Jacinto Juárez78% (9)
- Botanica-Arboricultura-Libro-Fruticultura-Agusti (Cap 14) - OcredDokumen38 halamanBotanica-Arboricultura-Libro-Fruticultura-Agusti (Cap 14) - OcredAdrian AchupallasBelum ada peringkat
- TDR IrrigacionDokumen27 halamanTDR IrrigacionsmithBelum ada peringkat
- Cuarta Encuesta Sobre Consumo Drogas EL SALVADOR 2018 (ISBN)Dokumen146 halamanCuarta Encuesta Sobre Consumo Drogas EL SALVADOR 2018 (ISBN)Richard RiccioBelum ada peringkat
- Marco Teorico - ProcedimientoDokumen2 halamanMarco Teorico - ProcedimientoLissette RamosBelum ada peringkat
- INSTRUCTIVO DE USO CORRECTO DE EPPsDokumen6 halamanINSTRUCTIVO DE USO CORRECTO DE EPPsBerthaMendozaPalominoBelum ada peringkat
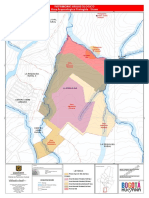
- Mapa Usme IDPC Areas ProtegidasDokumen1 halamanMapa Usme IDPC Areas ProtegidasYeinner Andres Lopez NarvaezBelum ada peringkat
- Merton Thomas Escritos Esenciales PDFDokumen139 halamanMerton Thomas Escritos Esenciales PDFJosé Miguel Abad100% (8)
- Prueba OTISDokumen7 halamanPrueba OTISHenry Alvarez85% (13)
- Ficha Tecnica Cilindro Telescopico HTR4350 HolmatroDokumen1 halamanFicha Tecnica Cilindro Telescopico HTR4350 HolmatroAnonymous XUkY1xBelum ada peringkat
- Ensayo de Corte Directo Astm D3080 - 04: Area de Mecanica de SuelosDokumen2 halamanEnsayo de Corte Directo Astm D3080 - 04: Area de Mecanica de SuelosMiki Luis Salvatierra ÑavincopaBelum ada peringkat
- Manual y de Conoc. y Mtto. I-Iv Escalon Fus. HKDokumen65 halamanManual y de Conoc. y Mtto. I-Iv Escalon Fus. HKJUAN RAMON BUESTAN GUAYLLASBelum ada peringkat
- Trictico Administracion PDFDokumen2 halamanTrictico Administracion PDFEvi DiazBelum ada peringkat
- Aislamiento SismicoDokumen12 halamanAislamiento SismicoJorge Arturo Checmapocco FigueroaBelum ada peringkat
- Salud Oral Durante El EmbarazoDokumen26 halamanSalud Oral Durante El EmbarazolauraBelum ada peringkat
- Analisis Microbiologico de Fuente Hidrica CssDokumen3 halamanAnalisis Microbiologico de Fuente Hidrica CssJess HuntBelum ada peringkat
- Ca Estomago-JmhDokumen34 halamanCa Estomago-JmhAna Maria Ipanaque AlfaroBelum ada peringkat
- Guiaderepasounmsm 2015 150701015853 Lva1 App6892Dokumen91 halamanGuiaderepasounmsm 2015 150701015853 Lva1 App6892paolawBelum ada peringkat
- Que Son Los MineralesDokumen4 halamanQue Son Los MineralesyonathanBelum ada peringkat
- Tarea 03 - La Empresa y Su EntornoDokumen11 halamanTarea 03 - La Empresa y Su EntornoSamadi BejaranoBelum ada peringkat
- Informe Laboratorio Procesos Carnicos BYDBDokumen16 halamanInforme Laboratorio Procesos Carnicos BYDByolima dazaBelum ada peringkat
- Check List Compactador de BasuraDokumen4 halamanCheck List Compactador de BasuraManuel Castillo Fernandez50% (2)
- La Montaña Del CondorDokumen161 halamanLa Montaña Del Condorgomezrendon50% (2)