Anda mungkin juga menyukai
- Examen RDM-GC-2020 Avec CorrectionDokumen3 halamanExamen RDM-GC-2020 Avec CorrectionBahaa Al haytham100% (1)
- Manuel RDM6Dokumen22 halamanManuel RDM6Mohamed Berzouk100% (2)
- RDM ExercicesDokumen69 halamanRDM ExercicesAhmaad Bamba SeckBelum ada peringkat
- 2-Chapitre II - Plancher MixteDokumen11 halaman2-Chapitre II - Plancher MixteLamia FeghaliBelum ada peringkat
- Introducton: 1. Définition de La Dalle PleineDokumen11 halamanIntroducton: 1. Définition de La Dalle PleineInsaf SafouBelum ada peringkat
- Méthode de MohrDokumen17 halamanMéthode de MohrDragana Jevremovic50% (2)
- Correction de La Serie 02Dokumen11 halamanCorrection de La Serie 02Oussama100% (2)
- TD Mecanique Des Structute 2021Dokumen9 halamanTD Mecanique Des Structute 2021زهرة المدائنBelum ada peringkat
- Escalier PfeDokumen10 halamanEscalier PfeBadra Ali SanogoBelum ada peringkat
- Methode Forces ResumeDokumen2 halamanMethode Forces ResumetohouriBelum ada peringkat
- BalconDokumen4 halamanBalconWarda JoryBelum ada peringkat
- TP5 TreillisDokumen7 halamanTP5 TreillisAyoubBelum ada peringkat
- Flexion DéviéeDokumen4 halamanFlexion DéviéeDidine Seghier100% (1)
- ExDokumen86 halamanExgenesis100% (1)
- RDM1 Methode Des Forces ExercicesDokumen35 halamanRDM1 Methode Des Forces ExercicesBenoit PzBelum ada peringkat
- TD1 P&CDokumen4 halamanTD1 P&CalmerBelum ada peringkat
- Produit D'inertie Axes PrincipauxDokumen4 halamanProduit D'inertie Axes PrincipauxMhd OuakBelum ada peringkat
- Formulaire Flèches FlexionDokumen4 halamanFormulaire Flèches Flexionmilasan1100% (1)
- Portiques RDM PDFDokumen10 halamanPortiques RDM PDFAnonymous ww55t9C100% (1)
- Corrige Ouvrages CALCUL-STRUCTUREDokumen4 halamanCorrige Ouvrages CALCUL-STRUCTUREChadbra0% (1)
- ISTEUB - Béton Armé - Souha Bahlous Flexion Section T SerieDokumen4 halamanISTEUB - Béton Armé - Souha Bahlous Flexion Section T SerieMoadh Trifi100% (1)
- RDM - Flexion DeviéeDokumen6 halamanRDM - Flexion DeviéeTOVIHO SessinouBelum ada peringkat
- Examen de Béton Armé II: Exercice 1Dokumen1 halamanExamen de Béton Armé II: Exercice 1elfarissi jaouadBelum ada peringkat
- Théorème de MENABREA Exercice 1Dokumen11 halamanThéorème de MENABREA Exercice 1Rachdi Soumiasou100% (2)
- Chapitre3 Caracteristiques Geometriques Des Sections PlanesDokumen13 halamanChapitre3 Caracteristiques Geometriques Des Sections Planesimed imdd100% (3)
- 07 Poutres en Flexion SimpleDokumen20 halaman07 Poutres en Flexion SimpleAbdelhak GuettiBelum ada peringkat
- RDM Méthode Des ForcesDokumen1 halamanRDM Méthode Des ForcesAnonymous YgEKXgW86% (7)
- Serie2 RDM2 2019 2020 PDFDokumen2 halamanSerie2 RDM2 2019 2020 PDFyahyaBelum ada peringkat
- rdm2 - Cours - 4 - Méthodes Energétiques - 2016-17Dokumen12 halamanrdm2 - Cours - 4 - Méthodes Energétiques - 2016-17Jasmine YasmineBelum ada peringkat
- Chapitre 3 Résolution de Systèmes Hyperstatiques Par La Méthode Des ForcesDokumen6 halamanChapitre 3 Résolution de Systèmes Hyperstatiques Par La Méthode Des ForcesAbbas ZakariaBelum ada peringkat
- Chap. 5 Calcul Des Portiques Hyperstatiques Par La Méthode Des ForcesDokumen35 halamanChap. 5 Calcul Des Portiques Hyperstatiques Par La Méthode Des ForcesWambié Nagaro100% (1)
- Chapitre III Calcul Des Portiques Sous Leffet Des Charges HorizontalesDokumen4 halamanChapitre III Calcul Des Portiques Sous Leffet Des Charges Horizontaleshammoudi salimBelum ada peringkat
- Calcul D'un Arc Isostatique Soumis À Des Charges Uniformément RépartiesDokumen3 halamanCalcul D'un Arc Isostatique Soumis À Des Charges Uniformément RépartiesAnas Yassine67% (3)
- Exo13 CorigéDokumen2 halamanExo13 CorigéYoussef EL Mlili100% (2)
- Poutre Exo 03Dokumen3 halamanPoutre Exo 03Samir2020Belum ada peringkat
- Explication Du Degré D'hyperstaticité: 3 Barres) Ou Entre Deux Appuis Et Des BarresDokumen2 halamanExplication Du Degré D'hyperstaticité: 3 Barres) Ou Entre Deux Appuis Et Des BarresAbderrahim Boulanouar100% (1)
- Correction - Descentes de ChargesDokumen14 halamanCorrection - Descentes de ChargesJade BussonBelum ada peringkat
- TD 1 RDM2Dokumen4 halamanTD 1 RDM2Sẵffǿủ JặmếsBelum ada peringkat
- RDM TD (Flexion)Dokumen4 halamanRDM TD (Flexion)Khawla BkBelum ada peringkat
- Méthode Des Forces Poutre Hyperstatique SymétriqueDokumen2 halamanMéthode Des Forces Poutre Hyperstatique SymétriqueMohamed BazinBelum ada peringkat
- Chapitre Iii-Theorie de L'etat de DeformationDokumen9 halamanChapitre Iii-Theorie de L'etat de DeformationFouad Kehila100% (1)
- Chap - I - II - Int - Calcul IndicielDokumen11 halamanChap - I - II - Int - Calcul Indicielmomo100% (1)
- Efforts Et Déplacement Dans Une Poutre TreillisDokumen11 halamanEfforts Et Déplacement Dans Une Poutre TreillisJean-Vincent KandelaBelum ada peringkat
- Solution TD - Théorème de CasteglianoDokumen24 halamanSolution TD - Théorème de CasteglianoBasiito100% (1)
- La Descente de ChargesDokumen4 halamanLa Descente de ChargesDon Yassine100% (1)
- Cours BennegadiDokumen66 halamanCours BennegadimouradBelum ada peringkat
- Méthodes ÉnergétiqueDokumen6 halamanMéthodes ÉnergétiqueNawres MsakniBelum ada peringkat
- TATSAMBON - Méthode Des DéplacementsDokumen22 halamanTATSAMBON - Méthode Des Déplacementslando de chanceBelum ada peringkat
- 1 Généralité RDMDokumen7 halaman1 Généralité RDMecomech100% (2)
- Serie D'exercices MDSDokumen2 halamanSerie D'exercices MDSMira Tino50% (2)
- Poutres ContinuesDokumen24 halamanPoutres ContinuesChristian MilleriouxBelum ada peringkat
- RDM trprt3 TRACTIONDokumen3 halamanRDM trprt3 TRACTIONsahraouiBelum ada peringkat
- 04 I Oscillateur Harmonique Libre A Un Degre de LiberteDokumen6 halaman04 I Oscillateur Harmonique Libre A Un Degre de LiberteRaphaël SimoninBelum ada peringkat
- Exmecanique 2008-2009 4 PDFDokumen12 halamanExmecanique 2008-2009 4 PDFIl NBBelum ada peringkat
- Page FacebookDokumen3 halamanPage FacebookDjm AlgBelum ada peringkat
- CH5 - Traction Et CompressionDokumen5 halamanCH5 - Traction Et Compressionhadjer amel DehiniBelum ada peringkat
- Chap 3 Dimensionement Des Poutres Isostatiques Sollicité en Flexion SimpleDokumen26 halamanChap 3 Dimensionement Des Poutres Isostatiques Sollicité en Flexion Simpleyolande patricia bekada massiaBelum ada peringkat
- TP VibrationDokumen11 halamanTP VibrationAzeddine BoughmarBelum ada peringkat
- TP VibrationDokumen11 halamanTP VibrationCours de soutien pour étudiants universitairesBelum ada peringkat
- R SumDokumen4 halamanR SumKorichiKarimBelum ada peringkat
- 1 - PDFsam - Projection Resumer PDFDokumen11 halaman1 - PDFsam - Projection Resumer PDFKorichiKarimBelum ada peringkat
- Tube de Liaison PDFDokumen3 halamanTube de Liaison PDFKorichiKarimBelum ada peringkat
- Application Du Diagramme TTTDokumen2 halamanApplication Du Diagramme TTTKorichiKarimBelum ada peringkat
- La Période de FusionDokumen4 halamanLa Période de FusionKorichiKarimBelum ada peringkat
- Support de Palier PDFDokumen2 halamanSupport de Palier PDFKorichiKarim100% (1)
- R SumDokumen4 halamanR SumKorichiKarimBelum ada peringkat
- Cours8 PDFDokumen3 halamanCours8 PDFKorichiKarimBelum ada peringkat
- Assemblages Et Tribo - TriboDokumen51 halamanAssemblages Et Tribo - TriboKorichiKarimBelum ada peringkat
- CH II C Ramiques Avanc 1Dokumen14 halamanCH II C Ramiques Avanc 1KorichiKarimBelum ada peringkat
- C21 Métallurgie DU FERDokumen4 halamanC21 Métallurgie DU FERKorichiKarimBelum ada peringkat
- Meilleur Model Demande D Emploi Par PDFDokumen2 halamanMeilleur Model Demande D Emploi Par PDFabdelhadi100% (1)
- Chapitre 03 Phénomènes de Surfaces PDFDokumen13 halamanChapitre 03 Phénomènes de Surfaces PDFزيد بخليفةBelum ada peringkat
- Traitement Thermique Pour ÉlectDokumen5 halamanTraitement Thermique Pour ÉlectKorichiKarimBelum ada peringkat
- ChIV Traitement ThermiqueDokumen4 halamanChIV Traitement ThermiqueKorichiKarimBelum ada peringkat
- Designationdesaciers PDFDokumen18 halamanDesignationdesaciers PDFrachidradouaniBelum ada peringkat
- Support de Palier PDFDokumen2 halamanSupport de Palier PDFKorichiKarim100% (1)
- Charte Fran - Ais D - FDokumen12 halamanCharte Fran - Ais D - FLarbi ElbakkaliBelum ada peringkat
- S2 Ethique Deontologie - 2017 1Dokumen3 halamanS2 Ethique Deontologie - 2017 1KorichiKarimBelum ada peringkat
- Module Thique D Ontologie Hamiane.2018Dokumen18 halamanModule Thique D Ontologie Hamiane.2018KorichiKarim100% (1)
- Meilleur Model Demande D Emploi Par PDFDokumen2 halamanMeilleur Model Demande D Emploi Par PDFabdelhadi100% (1)
- Temp 1531387133 ContentDokumen12 halamanTemp 1531387133 ContentKorichiKarimBelum ada peringkat
- R SumDokumen4 halamanR SumKorichiKarimBelum ada peringkat
- 25 PDFDokumen3 halaman25 PDFKorichiKarimBelum ada peringkat
- Temp 1531387133 ContentDokumen12 halamanTemp 1531387133 ContentKorichiKarimBelum ada peringkat
- Cours Matlab StochastiqueDokumen45 halamanCours Matlab StochastiqueAmine HamdouchiBelum ada peringkat
- Metallurgie de LaluminiumDokumen9 halamanMetallurgie de LaluminiumKorichiKarimBelum ada peringkat
- La Période de FusionDokumen4 halamanLa Période de FusionKorichiKarimBelum ada peringkat
- MN Et MATLAB - 2Dokumen25 halamanMN Et MATLAB - 2KorichiKarim100% (1)
- TS de l'IAPDokumen1 halamanTS de l'IAPKorichiKarim100% (1)
- Devoir Synthése N°1 Avec Correction - Mathematique - Bac Science - Lycée Majida Boulila SFax - 12-12-2014Dokumen5 halamanDevoir Synthése N°1 Avec Correction - Mathematique - Bac Science - Lycée Majida Boulila SFax - 12-12-2014Rochdi BouzaienBelum ada peringkat
- TP Onduleur MonophaseDokumen8 halamanTP Onduleur MonophaseMeDove AmansagBelum ada peringkat
- La Couleur Dans Les Minéraux PDFDokumen27 halamanLa Couleur Dans Les Minéraux PDFAnonymous 8VbEv5tA3Belum ada peringkat
- Route 2Dokumen55 halamanRoute 2Shiler FleurimaBelum ada peringkat
- TD Calculvectoriel1718 CorrectionDokumen12 halamanTD Calculvectoriel1718 CorrectionbeckerrolandhBelum ada peringkat
- Méthodes ÉnergétiquesDokumen25 halamanMéthodes ÉnergétiquesAdam MounsiBelum ada peringkat
- T.P. Moment D'inertie Et Énergie Cinétique de Rotation: R M R M EDokumen3 halamanT.P. Moment D'inertie Et Énergie Cinétique de Rotation: R M R M EYazine ZeidBelum ada peringkat
- Composites Jean-Marie Berthelot PDFDokumen667 halamanComposites Jean-Marie Berthelot PDFAlex Abad91% (11)
- Commande VectorielleDokumen13 halamanCommande VectorielleSamou SamokaBelum ada peringkat
- Décret N°88-1056 Du 14 Novembre 1988 PDFDokumen45 halamanDécret N°88-1056 Du 14 Novembre 1988 PDFAbdelkader MadourBelum ada peringkat
- Applications Du Produit Scalaire Dans LespaceDokumen7 halamanApplications Du Produit Scalaire Dans Lespaceapi-302372012Belum ada peringkat
- Dungs MB-LE ZRDLE Doc v2 PDFDokumen6 halamanDungs MB-LE ZRDLE Doc v2 PDFe-genieclimatique.comBelum ada peringkat
- Le Système MWDDokumen7 halamanLe Système MWDAli Alnafe100% (1)
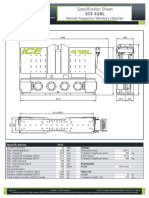
- Vibohammer Specification ICE 416 PDFDokumen2 halamanVibohammer Specification ICE 416 PDFBapusaheb GuthaleBelum ada peringkat
- 2010 Pervibration Beton AEDokumen8 halaman2010 Pervibration Beton AEFranco FrancoBelum ada peringkat
- 1875 Debauve Manuel Ingenieur Ponts PDFDokumen285 halaman1875 Debauve Manuel Ingenieur Ponts PDFemmanuel nuñez ruizBelum ada peringkat
- IntroAnalyseSpectrale PDFDokumen173 halamanIntroAnalyseSpectrale PDFdadaBelum ada peringkat
- Projet Pompe DoseuseDokumen32 halamanProjet Pompe DoseusemahergarfaBelum ada peringkat
- TP de TorsionDokumen5 halamanTP de Torsionwaei88% (8)
- Syllabus Algebre LineaireDokumen6 halamanSyllabus Algebre Lineairefaresfares84Belum ada peringkat
- Le Délire HumainDokumen50 halamanLe Délire HumainThom_latulipe100% (2)
- 01 Architecture ReseauxDokumen53 halaman01 Architecture Reseauxelmandouba100% (1)
- Vtstranformationscomplexes PDFDokumen2 halamanVtstranformationscomplexes PDFChaabane BOUALIBelum ada peringkat
- E Ph1psi2017 PDFDokumen8 halamanE Ph1psi2017 PDFBrandy OdonnellBelum ada peringkat
- Transfert D'énergie Et Puissance Électrique PDFDokumen58 halamanTransfert D'énergie Et Puissance Électrique PDFchocho ANBelum ada peringkat
- Geometrie Analytique II CorrigeDokumen22 halamanGeometrie Analytique II CorrigeNdeye Fatou SallBelum ada peringkat
- Rapport de Stage KOUCHAD FOUADDokumen36 halamanRapport de Stage KOUCHAD FOUADfouad86% (77)
- Machine - AC Synch MotDokumen26 halamanMachine - AC Synch Motsaad ratbiBelum ada peringkat
- Metho Choix Moteur Courant Continu.i4303.v085Dokumen3 halamanMetho Choix Moteur Courant Continu.i4303.v085imadBelum ada peringkat
- Algorithme de Hough (Rapport)Dokumen6 halamanAlgorithme de Hough (Rapport)Rehahlia AmineBelum ada peringkat