Anda mungkin juga menyukai
- Fundamental Concepts of Internet of Things (IOT)Dari EverandFundamental Concepts of Internet of Things (IOT)Belum ada peringkat
- Pick and Place Robotic Arm Implementation Using ArduinoDokumen9 halamanPick and Place Robotic Arm Implementation Using Arduinodhinesh dinsBelum ada peringkat
- Hand Gestureand Voice Controlled Smart VehicleDokumen5 halamanHand Gestureand Voice Controlled Smart VehicleSAHITHLAL HOWDEKARBelum ada peringkat
- Abs 1Dokumen31 halamanAbs 1sharon. thellaBelum ada peringkat
- Akhila Sem (22Dokumen10 halamanAkhila Sem (22ISHMAELBelum ada peringkat
- Ijem V7 N6 5 PDFDokumen9 halamanIjem V7 N6 5 PDFManoj ManuBelum ada peringkat
- Distance Controlled Rescue and Security Mobile RobotDokumen6 halamanDistance Controlled Rescue and Security Mobile Robotmidhuna94Belum ada peringkat
- All ProjectsDokumen36 halamanAll ProjectsAsmaa AmerBelum ada peringkat
- FYP ProposalDokumen5 halamanFYP ProposalYawar ShahBelum ada peringkat
- Distance Controlled Rescue and Security Mobile RobotDokumen6 halamanDistance Controlled Rescue and Security Mobile Robotmasud1470Belum ada peringkat
- Integration of Home Assistance With A Gesture Controlled Robotic ArmDokumen5 halamanIntegration of Home Assistance With A Gesture Controlled Robotic ArmTajbia HossainBelum ada peringkat
- Voice Based Robotic Arm VehicleDokumen4 halamanVoice Based Robotic Arm VehicleInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- AbhishekDokumen13 halamanAbhishekAbhishek ChettyBelum ada peringkat
- PProposalDokumen4 halamanPProposalMuntasir FahimBelum ada peringkat
- IJRPR3898Dokumen6 halamanIJRPR3898revanth916Belum ada peringkat
- Formated ReportDokumen23 halamanFormated ReportJackBelum ada peringkat
- Human Motion Controlled Wireless RobotDokumen4 halamanHuman Motion Controlled Wireless RobotIJSTEBelum ada peringkat
- MULTIPURPOSE ROBO OprationDokumen7 halamanMULTIPURPOSE ROBO OprationDinesh DineshBelum ada peringkat
- Gesture Control RobotDokumen17 halamanGesture Control RobotUday Kumar DBelum ada peringkat
- Share Robotic ArmDokumen6 halamanShare Robotic Armdeepthi velicharlaBelum ada peringkat
- Obstacle Avoidance Robotic VehicleDokumen10 halamanObstacle Avoidance Robotic VehicleSpiwe MavisBelum ada peringkat
- Pick and Place Spying RobotDokumen9 halamanPick and Place Spying RobotKaran GowdaBelum ada peringkat
- Android Controlled Bluetooth RobotDokumen15 halamanAndroid Controlled Bluetooth RobotSuyash BansalBelum ada peringkat
- Arduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash GuptaDokumen3 halamanArduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash Guptaabhishek kumarBelum ada peringkat
- Andi 2018 IOP Conf. Ser. Mater. Sci. Eng. 453 012067Dokumen9 halamanAndi 2018 IOP Conf. Ser. Mater. Sci. Eng. 453 012067jujun juniadiBelum ada peringkat
- S151122 Hand Motion Controlled Robotic Arm PDFDokumen5 halamanS151122 Hand Motion Controlled Robotic Arm PDFSara AlabwainiBelum ada peringkat
- Iot Based Surveillance Robot IJERTV7IS030061Dokumen5 halamanIot Based Surveillance Robot IJERTV7IS030061rgkusumbaBelum ada peringkat
- IoT Based Smart Multi Application SurveillanceDokumen5 halamanIoT Based Smart Multi Application SurveillanceVundi Sri Harsha100% (1)
- Development of Arduino Powered Robotic Vehicle With Automatic Obstacle Detection and AvoidanceDokumen7 halamanDevelopment of Arduino Powered Robotic Vehicle With Automatic Obstacle Detection and Avoidanceukavnganesh2002Belum ada peringkat
- Warehouse Management BOT Using ArduinoDokumen6 halamanWarehouse Management BOT Using ArduinoIJRASETPublicationsBelum ada peringkat
- Robotic Arm Control Through Mimicking of Miniature Robotic ArmDokumen7 halamanRobotic Arm Control Through Mimicking of Miniature Robotic Armbendali nadirBelum ada peringkat
- Advance Line Following Robot: Shivam Singh, Prashant KumarDokumen3 halamanAdvance Line Following Robot: Shivam Singh, Prashant Kumaranil kasot100% (1)
- RFID Based Human Following Load Carrier ChangedDokumen9 halamanRFID Based Human Following Load Carrier ChangedmunugotisumanthraoBelum ada peringkat
- 123456Dokumen11 halaman123456Abhishek ChettyBelum ada peringkat
- Joystick Controlled Industrial Robotic System With Robotic ArmDokumen5 halamanJoystick Controlled Industrial Robotic System With Robotic ArmSanjeev KumarBelum ada peringkat
- Line Following Robot ResearchDokumen4 halamanLine Following Robot ResearchtherealslimBelum ada peringkat
- SmartvacuumrobotDokumen6 halamanSmartvacuumrobotBhavana DornalaBelum ada peringkat
- Dr. Ambedkar Institute of Technology: Under The Guidance ofDokumen6 halamanDr. Ambedkar Institute of Technology: Under The Guidance ofSushanth KengunteBelum ada peringkat
- SMART CarDokumen9 halamanSMART Cartaha azadBelum ada peringkat
- Singh 2018Dokumen9 halamanSingh 2018roboticsengineer.anttBelum ada peringkat
- Arduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringDokumen8 halamanArduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringAbhishekBelum ada peringkat
- Cordless Power ControllerDokumen3 halamanCordless Power Controllerdarren mayorBelum ada peringkat
- Robotic Car Using Arduino With Bluetooth ControllerDokumen8 halamanRobotic Car Using Arduino With Bluetooth ControllerSikhiva Publishing HouseBelum ada peringkat
- Pick and Place Robotic Arm Research PaperDokumen5 halamanPick and Place Robotic Arm Research PaperChinmay ChaturvediBelum ada peringkat
- Robotic Car Using Arduino With Bluetooth PDFDokumen4 halamanRobotic Car Using Arduino With Bluetooth PDFSummer KoBelum ada peringkat
- Paper 11-Gesture Controlled Robot Using Image ProcessingDokumen9 halamanPaper 11-Gesture Controlled Robot Using Image ProcessingYash SharmaBelum ada peringkat
- 897-900 IJER - 2016 - 1209 KrishnaPrasadh KSDokumen4 halaman897-900 IJER - 2016 - 1209 KrishnaPrasadh KSInnovative Research PublicationsBelum ada peringkat
- Design and Implementation of A Wireless Gesture Controlled Robotic Arm With VisionDokumen8 halamanDesign and Implementation of A Wireless Gesture Controlled Robotic Arm With VisionAli Najim Al-AskariBelum ada peringkat
- Surveillance Robotin Hazardous Placeusing Io TTechnologyDokumen7 halamanSurveillance Robotin Hazardous Placeusing Io TTechnologypradi66554433Belum ada peringkat
- Mini Project Abstracts - EmbeddedDokumen24 halamanMini Project Abstracts - EmbeddedS Manivannan 16BIT0437Belum ada peringkat
- Wireless Surveillance Robot With Motion Detection and Live Video TransmissionDokumen9 halamanWireless Surveillance Robot With Motion Detection and Live Video TransmissionrajatpreetBelum ada peringkat
- Multifunctional Robot Car Using ArudinoDokumen10 halamanMultifunctional Robot Car Using ArudinoadscynorBelum ada peringkat
- Robot Control Design Using Android SmartphoneDokumen8 halamanRobot Control Design Using Android Smartphoneسجاد حبيبBelum ada peringkat
- Automation of Floor Cleaning RobotDokumen6 halamanAutomation of Floor Cleaning RobotIJRASETPublicationsBelum ada peringkat
- Automatic Pick and Place Robotic Arm Vehicle: IjarcceDokumen3 halamanAutomatic Pick and Place Robotic Arm Vehicle: Ijarccebendali nadirBelum ada peringkat
- ADVANCE SERVICE ROBOT FOR HUMAN ASSISTANCE Final LifiDokumen5 halamanADVANCE SERVICE ROBOT FOR HUMAN ASSISTANCE Final LifihamsaBelum ada peringkat
- Design and Development of An Embedded System For Robotic Arm Movement Control Using Voice Recognition and Zigbee Communication TechnologiesDokumen2 halamanDesign and Development of An Embedded System For Robotic Arm Movement Control Using Voice Recognition and Zigbee Communication TechnologiesKumar Goud.KBelum ada peringkat
- IRJET - Gesture Controlled Robot With Obs PDFDokumen3 halamanIRJET - Gesture Controlled Robot With Obs PDFCarina FelnecanBelum ada peringkat
- Development of Camouflage Technique Based Multifunctional Army RobotDokumen6 halamanDevelopment of Camouflage Technique Based Multifunctional Army Robothrithik1813Belum ada peringkat
- ANSI - Ahri Standard 550-590 (I-P) With Addendum 3Dokumen109 halamanANSI - Ahri Standard 550-590 (I-P) With Addendum 3Afzal KhanBelum ada peringkat
- Introduction To ICT EthicsDokumen8 halamanIntroduction To ICT EthicsJohn Niño FilipinoBelum ada peringkat
- SOP For Handling of Rejected Raw MaterialDokumen6 halamanSOP For Handling of Rejected Raw Materialanoushia alviBelum ada peringkat
- Athena Huongdan Hoc Hacker Mu Trang AehDokumen1 halamanAthena Huongdan Hoc Hacker Mu Trang AehNguyen Ba HoangBelum ada peringkat
- Checklist For Buying A Better Used Car in MalaysiaDokumen2 halamanChecklist For Buying A Better Used Car in MalaysiaSurendra KumarBelum ada peringkat
- Saniaccess Pump Product SheetDokumen1 halamanSaniaccess Pump Product SheetArun UdayabhanuBelum ada peringkat
- Skills, Techniques and Production in Contemporary Art HANDOUT PDFDokumen4 halamanSkills, Techniques and Production in Contemporary Art HANDOUT PDFKeyy TaezaBelum ada peringkat
- ASOC Exam Study Based On Latest Syllabus IndiaDokumen238 halamanASOC Exam Study Based On Latest Syllabus IndiaBiju Gopi ThilakaBelum ada peringkat
- VEL BS 2001aDokumen20 halamanVEL BS 2001aritoh8657Belum ada peringkat
- Simulation Exercise Manual HandbookDokumen44 halamanSimulation Exercise Manual HandbookMayte Gz100% (1)
- A.J Mcdougall: VP Director / Principal ConsultantDokumen27 halamanA.J Mcdougall: VP Director / Principal ConsultantDe SambasBelum ada peringkat
- A Biterm Topic Model For Short Texts SlideDokumen19 halamanA Biterm Topic Model For Short Texts Slideson070719969Belum ada peringkat
- Saturation Height FunctionDokumen27 halamanSaturation Height Functionpahlawankemaleman100% (1)
- Title Proposal Form For StudentsDokumen3 halamanTitle Proposal Form For StudentsHelen AlalagBelum ada peringkat
- Discussion Lab 2Dokumen2 halamanDiscussion Lab 2nazrin0% (1)
- Expansion Indicator Boiler #1Dokumen6 halamanExpansion Indicator Boiler #1Muhammad AbyBelum ada peringkat
- Thermal Modeling and Design Considerations of Lithium-Ion BatteriesDokumen8 halamanThermal Modeling and Design Considerations of Lithium-Ion BatteriesVarun Gupta100% (1)
- Mechanical ComprehensionDokumen14 halamanMechanical Comprehensiondanielhealy100% (6)
- FE107 Experimental ResultsDokumen11 halamanFE107 Experimental ResultsEsapermana RiyanBelum ada peringkat
- CHE3161 - Semester1 - 2011 - SolutionsDokumen12 halamanCHE3161 - Semester1 - 2011 - Solutionsvenkiee50% (2)
- Saudi Electricity Company - Southern Region (Saudi Arabia)Dokumen7 halamanSaudi Electricity Company - Southern Region (Saudi Arabia)azeemmet9924Belum ada peringkat
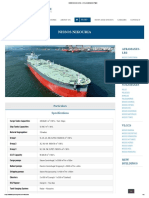
- NISSOS NIKOURIA - KYKLADES MARITIME - SpecsDokumen2 halamanNISSOS NIKOURIA - KYKLADES MARITIME - SpecsEkvazis TarsachBelum ada peringkat
- SeparatorsDokumen50 halamanSeparatorsCVACAPBelum ada peringkat
- Applications of Statistics and Probability in Civil EngineeringDokumen9 halamanApplications of Statistics and Probability in Civil EngineeringAlexis CruzBelum ada peringkat
- Id Based Multicast Secret-Key Management Scheme (SKMS) in ManetsDokumen10 halamanId Based Multicast Secret-Key Management Scheme (SKMS) in ManetsSandhya RaniBelum ada peringkat
- Hoja Tecnica Val Vu La 8044Dokumen5 halamanHoja Tecnica Val Vu La 8044train_ponce1080Belum ada peringkat
- Product Sheet: 970 Smartradar AtiDokumen4 halamanProduct Sheet: 970 Smartradar AtiJohn HowardBelum ada peringkat
- K13 High-Flex Waterproofing SlurryDokumen3 halamanK13 High-Flex Waterproofing SlurryAmila SampathBelum ada peringkat
- The Diffusion of Innovation and Adopter CategoriesDokumen3 halamanThe Diffusion of Innovation and Adopter CategoriesMark Angelo TitcoBelum ada peringkat
- MBAM Deployment GuideDokumen80 halamanMBAM Deployment GuidePsam Umasankar0% (1)