Anda mungkin juga menyukai
- Prácticas de redes de datos e industrialesDari EverandPrácticas de redes de datos e industrialesPenilaian: 4 dari 5 bintang4/5 (5)
- 100 circuitos de shields para arduino (español)Dari Everand100 circuitos de shields para arduino (español)Penilaian: 3.5 dari 5 bintang3.5/5 (3)
- Tcedd U3Dokumen8 halamanTcedd U3Hector LopezBelum ada peringkat
- Practica6 Villegas GonzalezDokumen15 halamanPractica6 Villegas GonzalezGermán VillegasBelum ada peringkat
- Trabajo CirdigDokumen18 halamanTrabajo CirdigErick Jesús Rodríguez Dávila100% (1)
- AtariDokumen8 halamanAtariLinoberth GonzalezBelum ada peringkat
- Descripción Del CircuitoDokumen7 halamanDescripción Del CircuitoJavier SarangoBelum ada peringkat
- Dimer CadenasDokumen66 halamanDimer CadenasGustavo Adolfo Ramirez PiedrahitaBelum ada peringkat
- PerifericosDokumen27 halamanPerifericosJose Manuel Rojas SoriaBelum ada peringkat
- Guion p3Dokumen5 halamanGuion p3estelaBelum ada peringkat
- A. Compuertas LógicasDokumen37 halamanA. Compuertas LógicasDiego CastroBelum ada peringkat
- Unidad 1, 2, 3Dokumen30 halamanUnidad 1, 2, 3Roberto Ruiz AlcántaraBelum ada peringkat
- Reporte Banda TransportadoraDokumen21 halamanReporte Banda TransportadoraAlejandro VillaseñorBelum ada peringkat
- Codificacion Audio SpdifDokumen16 halamanCodificacion Audio SpdifJeferson Nuñez NavaBelum ada peringkat
- Preparatorio 12 LoayzaDokumen13 halamanPreparatorio 12 LoayzaLuis LoayzaBelum ada peringkat
- Práctica 3 VHDLDokumen8 halamanPráctica 3 VHDLHoracio Fernández JiménezBelum ada peringkat
- Practica 8Dokumen9 halamanPractica 8Isaac Tonatiuh Ayala PérezBelum ada peringkat
- InfoPLC Net Ethernet Comunicacion Entre PLCs Via EthernetDokumen52 halamanInfoPLC Net Ethernet Comunicacion Entre PLCs Via EthernetRoberto Carlos Correa QuinteroBelum ada peringkat
- Proyecto Final 2011Dokumen9 halamanProyecto Final 2011Gustavo MorfeoBelum ada peringkat
- Puertoi 2 CDokumen5 halamanPuertoi 2 CLuis Eduardo MarquezBelum ada peringkat
- El Puerto Serial RS232 2022ADokumen16 halamanEl Puerto Serial RS232 2022AMonse MorenoBelum ada peringkat
- Controlar Display de 7 Segmentos Con Shift RegisterDokumen27 halamanControlar Display de 7 Segmentos Con Shift RegisterPOLLO45100% (1)
- P5 DlpsDokumen26 halamanP5 DlpsAlex CortezBelum ada peringkat
- Examen No3 (Práctico)Dokumen8 halamanExamen No3 (Práctico)Jaime JdBelum ada peringkat
- MemoriaDokumen32 halamanMemoriaPablo Rodriguez GonzalezBelum ada peringkat
- Reparaciones Controles RemotoDokumen6 halamanReparaciones Controles RemotolobotvBelum ada peringkat
- Lab3 Árbol de ExpansiónDokumen23 halamanLab3 Árbol de ExpansiónJESUSBelum ada peringkat
- Sumador Restador BCDDokumen46 halamanSumador Restador BCDLuis Fernando BravoBelum ada peringkat
- Test Fund Logica Digital Tarjeta 1Dokumen8 halamanTest Fund Logica Digital Tarjeta 1Jason BourneBelum ada peringkat
- TP2 Alu UartDokumen11 halamanTP2 Alu UartHommiesBelum ada peringkat
- Uart EsDokumen29 halamanUart EsRonal Alexander MontenegroBelum ada peringkat
- Recepción Serial RS-232 Con PicDokumen31 halamanRecepción Serial RS-232 Con PicDaniel Angelo Alfaro Rodriguez100% (2)
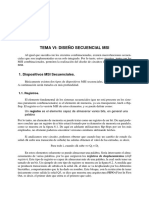
- Diseño Secuencial MsiDokumen36 halamanDiseño Secuencial MsiAldhair AlvarezBelum ada peringkat
- Lab Digitales InformeDokumen5 halamanLab Digitales InformeMartín CamposBelum ada peringkat
- Aplicaciones Flip FlopDokumen6 halamanAplicaciones Flip FlopRosa Sinchí50% (6)
- Automata FinitoDokumen8 halamanAutomata Finitoiceman2305Belum ada peringkat
- Protocolo I2C DefinicionDokumen9 halamanProtocolo I2C DefinicionNAHUEL IGLESIAS100% (1)
- Practica 4Dokumen10 halamanPractica 4Jairo M. CovarrubiasBelum ada peringkat
- DecodificadoresDokumen6 halamanDecodificadoresDennise JiménezBelum ada peringkat
- Curso de Electrónica - Electrónica Digital - Parte 10 - Aplicaciones para Los Contadores Digitales y Decodificadores (CUR6003S)Dokumen33 halamanCurso de Electrónica - Electrónica Digital - Parte 10 - Aplicaciones para Los Contadores Digitales y Decodificadores (CUR6003S)PabloBelum ada peringkat
- Certamen 2 Digitales Automotriz Forma A 2022Dokumen8 halamanCertamen 2 Digitales Automotriz Forma A 2022Segundo GarcesBelum ada peringkat
- Practica3 2019Dokumen25 halamanPractica3 2019rc7pablorBelum ada peringkat
- Repaso 2Dokumen5 halamanRepaso 2xmnt2002Belum ada peringkat
- Practica No. 9 - Microprocesadores Bravo León ESIME ZACATENCODokumen16 halamanPractica No. 9 - Microprocesadores Bravo León ESIME ZACATENCOYair Mera100% (1)
- Protocolos de Enlace de DatosDokumen28 halamanProtocolos de Enlace de Datosjorjito91Belum ada peringkat
- Modulo 6 Memorias Fisicas Apunte CompletoDokumen18 halamanModulo 6 Memorias Fisicas Apunte CompletoIgnacio José SantanaBelum ada peringkat
- Practica 01 Transmision y Recepción de Datos en SerieDokumen17 halamanPractica 01 Transmision y Recepción de Datos en SerieStephanie M Barreda SotomayorBelum ada peringkat
- Registro 8 BitsDokumen9 halamanRegistro 8 BitsArturo MartinezBelum ada peringkat
- Baez Cruz 11Dokumen11 halamanBaez Cruz 11DaniloPilacuánBelum ada peringkat
- Apuntes AVRDokumen9 halamanApuntes AVRirving_asBelum ada peringkat
- Módulo 5 Comunicacion Serial AsincronaDokumen11 halamanMódulo 5 Comunicacion Serial AsincronaMishell Sanchez GuevaraBelum ada peringkat
- Modulo UsartDokumen37 halamanModulo UsartEduardo GarciaBelum ada peringkat
- Contador DijitalDokumen10 halamanContador Dijitaltomkito100% (1)
- Use RS232Dokumen6 halamanUse RS232Gräce Mäggüiie PicöBelum ada peringkat
- Tarea 5. SEDokumen5 halamanTarea 5. SEAldo Sebastián Bustamante JoséBelum ada peringkat
- Capitulo 8 USARTDokumen7 halamanCapitulo 8 USARTrickypinaBelum ada peringkat
- Pre Informe 3Dokumen6 halamanPre Informe 3Cristhiam Felipe González MéndezBelum ada peringkat
- Trabajo Investigación Tema 4 (N°c.18500311)Dokumen32 halamanTrabajo Investigación Tema 4 (N°c.18500311)Jason ClementeBelum ada peringkat
- Circuitos DigitalesDokumen40 halamanCircuitos DigitalestadekotardeBelum ada peringkat
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDari EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaBelum ada peringkat
- METODO DOS VATIMETROS POTENCIA REACTIVA (Versión Aaron)Dokumen10 halamanMETODO DOS VATIMETROS POTENCIA REACTIVA (Versión Aaron)EribertMarquez100% (2)
- EcuacionesDokumen1 halamanEcuacionesEribertMarquezBelum ada peringkat
- Oferta de Pregrado Sartenejas Septiembre-Diciembre 2021Dokumen15 halamanOferta de Pregrado Sartenejas Septiembre-Diciembre 2021Octavio BetancourtBelum ada peringkat
- TrifásicaDokumen32 halamanTrifásicajuanalberto1234Belum ada peringkat
- Método Tres VatimetrosDokumen7 halamanMétodo Tres VatimetrosEribertMarquezBelum ada peringkat
- Diodo ZenerDokumen5 halamanDiodo ZenerEribertMarquezBelum ada peringkat
- METODO DOS VATIMETROS (Versión de Aaron) Parte 1Dokumen11 halamanMETODO DOS VATIMETROS (Versión de Aaron) Parte 1EribertMarquezBelum ada peringkat
- MC-2431 Primer Parcial 2012 Sep-DicDokumen1 halamanMC-2431 Primer Parcial 2012 Sep-DicEribertMarquezBelum ada peringkat
- Practica 1Dokumen9 halamanPractica 1EribertMarquezBelum ada peringkat
- Circuitos Rectificadores PDFDokumen17 halamanCircuitos Rectificadores PDFEribertMarquezBelum ada peringkat
- ListasDokumen28 halamanListasEribertMarquezBelum ada peringkat
- PLAN - 1177 - 1113 Ene-Mar 2020Dokumen1 halamanPLAN - 1177 - 1113 Ene-Mar 2020EribertMarquezBelum ada peringkat
- Circuitos Con DiodosDokumen25 halamanCircuitos Con DiodosEribertMarquezBelum ada peringkat
- Capítulo 6 Guia TeoriaDokumen8 halamanCapítulo 6 Guia TeoriaEribertMarquezBelum ada peringkat
- OrdenamientoDokumen16 halamanOrdenamientoEribertMarquezBelum ada peringkat
- Electro LabDokumen5 halamanElectro LabEribertMarquezBelum ada peringkat
- EA Diodo ZenerDokumen11 halamanEA Diodo Zenergrome grmeBelum ada peringkat
- Parcial Meca IIDokumen3 halamanParcial Meca IIEribertMarquezBelum ada peringkat
- T.E.G. Completo Analis Yusmar Carrizales Sánchez PDFDokumen206 halamanT.E.G. Completo Analis Yusmar Carrizales Sánchez PDFEribertMarquezBelum ada peringkat
- Al Que Esta Sentaado Een El TroonoDokumen3 halamanAl Que Esta Sentaado Een El TroonoAdan MijaresBelum ada peringkat
- Prelab 1Dokumen9 halamanPrelab 1EribertMarquezBelum ada peringkat
- MC-2431 Primer Parcial 2003 IntensivoDokumen1 halamanMC-2431 Primer Parcial 2003 IntensivoEribertMarquezBelum ada peringkat
- Curriculum Vitae Espiritu SantoDokumen1 halamanCurriculum Vitae Espiritu SantoEribertMarquezBelum ada peringkat
- T5 Distribuciones ContinuasDokumen11 halamanT5 Distribuciones ContinuasEribertMarquezBelum ada peringkat
- Tabla Distribucion NormalDokumen2 halamanTabla Distribucion NormalEribertMarquezBelum ada peringkat
- Datos CuriososDokumen1 halamanDatos CuriososEribertMarquezBelum ada peringkat
- Cielos GDokumen4 halamanCielos GEribertMarquezBelum ada peringkat
- PreceptosDokumen6 halamanPreceptosEribertMarquezBelum ada peringkat
- Hay Una Fuente en M2Dokumen2 halamanHay Una Fuente en M2Jose VeraBelum ada peringkat
- Planilla de Rectificación de Notas-V2 Pregrado LitoralDokumen1 halamanPlanilla de Rectificación de Notas-V2 Pregrado LitoralEribertMarquezBelum ada peringkat
- 7 Habilidades Necesarias para El BibliotecarioDokumen5 halaman7 Habilidades Necesarias para El BibliotecarioPablo Sergio AmarillaBelum ada peringkat
- (IPOO) ProyectoDokumen4 halaman(IPOO) Proyectojuan manuel urbano torresBelum ada peringkat
- Tema v. Fundamentos de Estructuras de Contención.Dokumen32 halamanTema v. Fundamentos de Estructuras de Contención.Gustavo RangelBelum ada peringkat
- 2 Armando Casos PracticosDokumen7 halaman2 Armando Casos PracticosHuache TiquicheoBelum ada peringkat
- Curso 4.erpDokumen95 halamanCurso 4.erpmariana torres chavezBelum ada peringkat
- TRIPTICODokumen2 halamanTRIPTICOkatherineBelum ada peringkat
- Revista La JUNTA JDCCPP Dic2018 159pag ARTsDokumen159 halamanRevista La JUNTA JDCCPP Dic2018 159pag ARTsleoncioBelum ada peringkat
- Informe de Laboratorio Ley Del PénduloDokumen8 halamanInforme de Laboratorio Ley Del PénduloIrani Franco ZabaletaBelum ada peringkat
- Cupon GymboreeDokumen1 halamanCupon Gymboreerdchavez77Belum ada peringkat
- Pensamiento SolidarDokumen6 halamanPensamiento SolidarAlvaro Jose Vega PeñatesBelum ada peringkat
- Manuali GS50 eDokumen15 halamanManuali GS50 eAnonymous YjoCCKBelum ada peringkat
- u3EJERCICIO PRACTICO 4Dokumen27 halamanu3EJERCICIO PRACTICO 4Vany LozanoBelum ada peringkat
- Criptomonedas La Caída Del Imperio de Las CriptomonedasDokumen40 halamanCriptomonedas La Caída Del Imperio de Las CriptomonedasMaira RivasBelum ada peringkat
- Oportunidades y Desafios Ley 31335 PDFDokumen29 halamanOportunidades y Desafios Ley 31335 PDFPriscila Cristina Echevarría López100% (1)
- Teoría Del Productor MarketingDokumen3 halamanTeoría Del Productor MarketingjeisoncamargoBelum ada peringkat
- Modelo Design ThinkingDokumen7 halamanModelo Design ThinkingXochiltBelum ada peringkat
- Profesorado Segunda Enseñanza Pedagogía EspecialidadDokumen1 halamanProfesorado Segunda Enseñanza Pedagogía EspecialidadcomputadoraBelum ada peringkat
- Relieve AmazonicoDokumen4 halamanRelieve AmazonicoMiguel Vilchez ElíasBelum ada peringkat
- Leonardo AtestiguamientoDokumen8 halamanLeonardo Atestiguamientoluissana_santelizBelum ada peringkat
- Examen6toGrado1erTrimestre2019 20MEEPDokumen13 halamanExamen6toGrado1erTrimestre2019 20MEEPSheryl RojasBelum ada peringkat
- Protocolo Traslado de Trabajadores - CYPCO - AGO. 2020-Rev.02Dokumen7 halamanProtocolo Traslado de Trabajadores - CYPCO - AGO. 2020-Rev.02andyBelum ada peringkat
- Lectura ComprensivaDokumen4 halamanLectura Comprensivamiguel0% (1)
- Iphone 14 Pro Max 5G 256Gb: Características DestacadasDokumen1 halamanIphone 14 Pro Max 5G 256Gb: Características DestacadasFrancesca GallegosBelum ada peringkat
- ENCANDILAMIENTODokumen5 halamanENCANDILAMIENTOMario Daniel Alvia ZambranoBelum ada peringkat
- Formato Vinculacion ComercialDokumen2 halamanFormato Vinculacion Comercialjhon fredy rodríguez guevaraBelum ada peringkat
- Acumulación Por Desposesión David Harvey Concept - Pesquisa GoogleDokumen2 halamanAcumulación Por Desposesión David Harvey Concept - Pesquisa GooglecareBelum ada peringkat
- Loc TiteDokumen14 halamanLoc TitekelvinBelum ada peringkat
- Instructivo Con Documentos-3Dokumen13 halamanInstructivo Con Documentos-3GAITAN MEZA CATALINABelum ada peringkat
- PLANIFICACION DIARIA YesiDokumen3 halamanPLANIFICACION DIARIA Yesiyesenia cruzBelum ada peringkat
- Manual Televisor LG 29fs4rk Chassis-Cw62cDokumen32 halamanManual Televisor LG 29fs4rk Chassis-Cw62cJohnathan Castelblanco ChavezBelum ada peringkat