Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Etap Tip 008Dokumen6 halamanEtap Tip 008gabriel_87Belum ada peringkat
- ETAP FAQ - Cable Pulling Project PDFDokumen3 halamanETAP FAQ - Cable Pulling Project PDFAtabat AduduBelum ada peringkat
- Etap Tip 013Dokumen2 halamanEtap Tip 013Zellagui EnergyBelum ada peringkat
- Modelado de Un Transformador en Delta AbiertoDokumen2 halamanModelado de Un Transformador en Delta AbiertoyradyhBelum ada peringkat
- Procedure For Converting Autocad Earth Drag To Etap PDFDokumen15 halamanProcedure For Converting Autocad Earth Drag To Etap PDFJose Alejandro100% (1)
- Etap Tip 013Dokumen2 halamanEtap Tip 013Zellagui EnergyBelum ada peringkat
- 17 - Ocp PDFDokumen15 halaman17 - Ocp PDFJose AlejandroBelum ada peringkat
- Optimal Capacitor Placement BenefitsDokumen4 halamanOptimal Capacitor Placement BenefitsRohith KumarBelum ada peringkat
- Transformer Inrush CurvesDokumen2 halamanTransformer Inrush CurvessudirmanpriyoBelum ada peringkat
- Arc FlashDokumen6 halamanArc FlashvenkyeeeBelum ada peringkat
- Transformadores Zig ZagDokumen3 halamanTransformadores Zig ZagJose AlejandroBelum ada peringkat
- Electrical Transmission and Distribution Reference Book of WestinghouseDokumen832 halamanElectrical Transmission and Distribution Reference Book of WestinghouseAlexis Fernandez Cordova94% (31)
- ETAP - Building One Line Diagram PDFDokumen5 halamanETAP - Building One Line Diagram PDFTareq_EELBelum ada peringkat
- 21a - BSD PDFDokumen19 halaman21a - BSD PDFJose AlejandroBelum ada peringkat
- Procedure For Converting Autocad Earth Drag To Etap PDFDokumen15 halamanProcedure For Converting Autocad Earth Drag To Etap PDFJose Alejandro100% (1)
- 16 - Optimal Power FlowDokumen23 halaman16 - Optimal Power Flowzionees01Belum ada peringkat
- Ground Grid Systems PDFDokumen27 halamanGround Grid Systems PDFJose AlejandroBelum ada peringkat
- Transient StabilityDokumen30 halamanTransient StabilityJose AlejandroBelum ada peringkat
- 13 Harmonics PDFDokumen40 halaman13 Harmonics PDFdesidehertianiBelum ada peringkat
- Cable Pulling PDFDokumen17 halamanCable Pulling PDFJose AlejandroBelum ada peringkat
- Nombres Nuevos A Libros IEEE de ColoresDokumen11 halamanNombres Nuevos A Libros IEEE de ColoresJose Alberto Rodriguez100% (1)
- Etap Tip 008Dokumen6 halamanEtap Tip 008gabriel_87Belum ada peringkat
- @practical Guide To Electrical Grounding, 1st Edition, 1999Dokumen131 halaman@practical Guide To Electrical Grounding, 1st Edition, 1999cyong7788100% (15)
- 19-AC Motor ProtectionDokumen16 halaman19-AC Motor ProtectionSristick100% (7)
- @practical Guide To Electrical Grounding, 1st Edition, 1999Dokumen131 halaman@practical Guide To Electrical Grounding, 1st Edition, 1999cyong7788100% (15)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Pitch DeckDokumen21 halamanPitch DeckIABelum ada peringkat
- Gas Compressor SizingDokumen1 halamanGas Compressor SizingNohemigdeliaLucenaBelum ada peringkat
- CM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletDokumen2 halamanCM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletJames HookBelum ada peringkat
- Mahindra&mahindraDokumen95 halamanMahindra&mahindraAshik R GowdaBelum ada peringkat
- L GSR ChartsDokumen16 halamanL GSR ChartsEmerald GrBelum ada peringkat
- 06 SAP PM Level 1 Role Matrix Template SampleDokumen5 halaman06 SAP PM Level 1 Role Matrix Template SampleRiteshSinhmar100% (1)
- The Bio-Based Economy in The NetherlandsDokumen12 halamanThe Bio-Based Economy in The NetherlandsIrving Toloache FloresBelum ada peringkat
- Etag 002 PT 2 PDFDokumen13 halamanEtag 002 PT 2 PDFRui RibeiroBelum ada peringkat
- Clustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaDokumen18 halamanClustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaAji LaksonoBelum ada peringkat
- Regulasi KampenDokumen81 halamanRegulasi KampenIrWaN Dompu100% (2)
- Spanish Greeting Card Lesson PlanDokumen5 halamanSpanish Greeting Card Lesson Planrobert_gentil4528Belum ada peringkat
- SievesDokumen3 halamanSievesVann AnthonyBelum ada peringkat
- Structural Design Basis ReportDokumen31 halamanStructural Design Basis ReportRajaram100% (1)
- Man Bni PNT XXX 105 Z015 I17 Dok 886160 03 000Dokumen36 halamanMan Bni PNT XXX 105 Z015 I17 Dok 886160 03 000Eozz JaorBelum ada peringkat
- Cause Analysis For Spun Pile Crack and BrokenDokumen11 halamanCause Analysis For Spun Pile Crack and BrokenRony LesbtBelum ada peringkat
- English Test For Grade 7 (Term 2)Dokumen6 halamanEnglish Test For Grade 7 (Term 2)UyenPhuonggBelum ada peringkat
- Source:: APJMR-Socio-Economic-Impact-of-Business-Establishments - PDF (Lpubatangas - Edu.ph)Dokumen2 halamanSource:: APJMR-Socio-Economic-Impact-of-Business-Establishments - PDF (Lpubatangas - Edu.ph)Ian EncarnacionBelum ada peringkat
- Understanding The Contribution of HRM Bundles For Employee Outcomes Across The Life-SpanDokumen15 halamanUnderstanding The Contribution of HRM Bundles For Employee Outcomes Across The Life-SpanPhuong NgoBelum ada peringkat
- Point and Figure ChartsDokumen5 halamanPoint and Figure ChartsShakti ShivaBelum ada peringkat
- Prediction of Compressive Strength of Research PaperDokumen9 halamanPrediction of Compressive Strength of Research PaperTaufik SheikhBelum ada peringkat
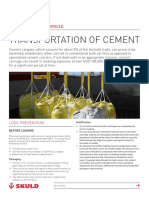
- Transportation of CementDokumen13 halamanTransportation of CementKaustubh Joshi100% (1)
- P3 Past Papers Model AnswersDokumen211 halamanP3 Past Papers Model AnswersEyad UsamaBelum ada peringkat
- Leveriza Heights SubdivisionDokumen4 halamanLeveriza Heights SubdivisionTabordan AlmaeBelum ada peringkat
- Naval TV SystemDokumen24 halamanNaval TV Systemsharmasandeep0010Belum ada peringkat
- Agma MachineDokumen6 halamanAgma Machinemurali036Belum ada peringkat
- End-Of-Chapter Answers Chapter 7 PDFDokumen12 halamanEnd-Of-Chapter Answers Chapter 7 PDFSiphoBelum ada peringkat
- AMS ANALITICA-AIRFLOW TSP-HVS BrochureDokumen1 halamanAMS ANALITICA-AIRFLOW TSP-HVS BrochureShady HellaBelum ada peringkat
- WWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDokumen8 halamanWWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDestiny EasonBelum ada peringkat
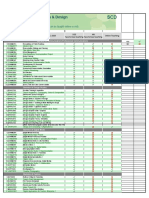
- SCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Dokumen2 halamanSCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Nguyễn Hồng AnhBelum ada peringkat
- OTP User Manual For English) v1,0Dokumen15 halamanOTP User Manual For English) v1,0auyinBelum ada peringkat