Anda mungkin juga menyukai
- Calculo Diferencial e Integral Full TOMO1 2020Dokumen476 halamanCalculo Diferencial e Integral Full TOMO1 2020Papitas FritasBelum ada peringkat
- Teoría Del CasoDokumen15 halamanTeoría Del CasoWilliam I.A. Llanos Torrico, MSc.100% (3)
- Practica 8 EDDokumen12 halamanPractica 8 EDChaavin RvBelum ada peringkat
- Candela CO2RE PDFDokumen4 halamanCandela CO2RE PDFGibrán CanalesBelum ada peringkat
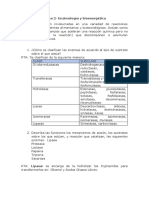
- Tarea 3 - Ejercicios 1 A 5 de MetaCata y Anabolismo - Sandra TorresDokumen23 halamanTarea 3 - Ejercicios 1 A 5 de MetaCata y Anabolismo - Sandra TorresJhon BarriosBelum ada peringkat
- Aporte Colaborativo Jenniffer OrozcoDokumen5 halamanAporte Colaborativo Jenniffer OrozcoJhon BarriosBelum ada peringkat
- Practica 2 FruverDokumen7 halamanPractica 2 FruverJhon BarriosBelum ada peringkat
- Paso 3 - 211616 - 6Dokumen12 halamanPaso 3 - 211616 - 6Jhon BarriosBelum ada peringkat
- Actividad Individual Fase3 Jhon BarriosDokumen36 halamanActividad Individual Fase3 Jhon BarriosJhon BarriosBelum ada peringkat
- Practica 1 - FruverDokumen5 halamanPractica 1 - FruverJhon BarriosBelum ada peringkat
- Tarea 3 - Bioquimica Colaborativo 201103 - 13Dokumen7 halamanTarea 3 - Bioquimica Colaborativo 201103 - 13Jhon Barrios100% (1)
- Hoja NectarDokumen9 halamanHoja NectarJhon BarriosBelum ada peringkat
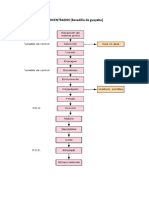
- Diagrama de Bloques - CONCENTRADOSDokumen2 halamanDiagrama de Bloques - CONCENTRADOSJhon BarriosBelum ada peringkat
- Tarea 3 - Bioquimica Colaborativo 201103 - 13Dokumen7 halamanTarea 3 - Bioquimica Colaborativo 201103 - 13Jhon Barrios100% (1)
- Procedimiento Cromatografia IonicaDokumen10 halamanProcedimiento Cromatografia IonicaJhon BarriosBelum ada peringkat
- Informe Laboratorio 1Dokumen11 halamanInforme Laboratorio 1Jhon BarriosBelum ada peringkat
- Practica 2Dokumen1 halamanPractica 2Jhon BarriosBelum ada peringkat
- Tarea 2 - BIOQUIMICADokumen7 halamanTarea 2 - BIOQUIMICAJhon Barrios100% (1)
- Paso 2 - 211616 - 6Dokumen8 halamanPaso 2 - 211616 - 6Jhon BarriosBelum ada peringkat
- Preguntas Cromatografia Fase 2Dokumen8 halamanPreguntas Cromatografia Fase 2Jhon BarriosBelum ada peringkat
- Paso 2 - 211616 - 6Dokumen8 halamanPaso 2 - 211616 - 6Jhon BarriosBelum ada peringkat
- Informe Laboratorio Practica 7Dokumen9 halamanInforme Laboratorio Practica 7Jhon BarriosBelum ada peringkat
- Tarea 2. Bioquimica Trabajo ColaborativoDokumen58 halamanTarea 2. Bioquimica Trabajo ColaborativoJhon BarriosBelum ada peringkat
- Ejercicio 25 TrigonometriaDokumen2 halamanEjercicio 25 TrigonometriaJhon BarriosBelum ada peringkat
- Ejercicio 15 Valor AbsolutoDokumen2 halamanEjercicio 15 Valor AbsolutoJhon BarriosBelum ada peringkat
- Preinforme de Laboratorio 3Dokumen5 halamanPreinforme de Laboratorio 3Jhon BarriosBelum ada peringkat
- Ejercicio 4Dokumen3 halamanEjercicio 4Jhon BarriosBelum ada peringkat
- Tarea 2 - Hidrocarburos Hidrocarburos Aromáticos, Alcoholes y Aminas Grupo 100416 - 37Dokumen23 halamanTarea 2 - Hidrocarburos Hidrocarburos Aromáticos, Alcoholes y Aminas Grupo 100416 - 37Jhon Barrios100% (2)
- Luz TigrerosDokumen11 halamanLuz TigrerosJhon BarriosBelum ada peringkat
- Preinformes 1 - Química OrgánicaDokumen43 halamanPreinformes 1 - Química OrgánicaJhon BarriosBelum ada peringkat
- Actividad Grupal Fase 1 212060 - 73 Marzo 2017 UlltimoDokumen20 halamanActividad Grupal Fase 1 212060 - 73 Marzo 2017 UlltimoJhon BarriosBelum ada peringkat
- Infografia Jhon BarriosDokumen2 halamanInfografia Jhon BarriosJhon BarriosBelum ada peringkat
- Paso 1 - 211616 - 6 - ParcialDokumen9 halamanPaso 1 - 211616 - 6 - ParcialJhon BarriosBelum ada peringkat
- 609-Paso Cuatro Trabajo Examen Nacional - Jhon BarriosDokumen20 halaman609-Paso Cuatro Trabajo Examen Nacional - Jhon BarriosJhon BarriosBelum ada peringkat
- Modelos AtomicosDokumen2 halamanModelos AtomicosOmaikyBelum ada peringkat
- Teoria AnclajesDokumen2 halamanTeoria AnclajeskevinsdragonBelum ada peringkat
- ESTRUCTURAS NAVALES I - 6ta SemanaDokumen21 halamanESTRUCTURAS NAVALES I - 6ta SemanaDiego RamosBelum ada peringkat
- Trabajo MatlabDokumen23 halamanTrabajo MatlabDeckert AsencioBelum ada peringkat
- Quimica GasesDokumen3 halamanQuimica GasesPaulo Cesar Guerrero BustamanteBelum ada peringkat
- Guía Nº2 Matemáticas - PotenciasDokumen4 halamanGuía Nº2 Matemáticas - PotenciasJacqueline Moraga SaezBelum ada peringkat
- Laboratorios de HidrocarburosDokumen4 halamanLaboratorios de HidrocarburosYessica RangelBelum ada peringkat
- Informe de Pruebas de ProducciónDokumen6 halamanInforme de Pruebas de ProducciónGeormanHernándezBelum ada peringkat
- Sesión 7.2 Optimización EjerciciosDokumen2 halamanSesión 7.2 Optimización EjerciciosJoe VilchezBelum ada peringkat
- Ley de HenryDokumen3 halamanLey de HenrydiegoBelum ada peringkat
- Práctica No. 3 - Lab. de Física EM-CBF212LDokumen10 halamanPráctica No. 3 - Lab. de Física EM-CBF212LAmbar SantanaBelum ada peringkat
- Tratamiento de Precalentamiento y PoscalentamientoDokumen5 halamanTratamiento de Precalentamiento y PoscalentamientoArnaldoBelum ada peringkat
- Laboratorio La FlorDokumen14 halamanLaboratorio La FlorSofia Miku GutierrezBelum ada peringkat
- Apuntes Capitulo 1 Ccna 2 PDFDokumen11 halamanApuntes Capitulo 1 Ccna 2 PDFpahiescorpBelum ada peringkat
- GP06 - Identificacion de Los Microcontroladores y Controladores Logicos ProgramablesDokumen13 halamanGP06 - Identificacion de Los Microcontroladores y Controladores Logicos Programablescolapse teiwinBelum ada peringkat
- 7011-Texto Del Artículo-19890-1-10-20140331Dokumen16 halaman7011-Texto Del Artículo-19890-1-10-20140331eduardo neiraBelum ada peringkat
- Clase 1 AnatomiaDokumen10 halamanClase 1 AnatomiaIrupe EncinaBelum ada peringkat
- Matematica 4Dokumen48 halamanMatematica 4Iris Pinto100% (1)
- Practica de Lab Oratorio I de Teoria de Comunicaciones I1Dokumen13 halamanPractica de Lab Oratorio I de Teoria de Comunicaciones I1newton_21005873Belum ada peringkat
- TIII Act3 DrullardDokumen2 halamanTIII Act3 DrullardPedro DrullardBelum ada peringkat
- Taller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFDokumen26 halamanTaller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFJulian AlcalaBelum ada peringkat
- Rectángulo EquivalenteDokumen5 halamanRectángulo EquivalenteTania LCBelum ada peringkat
- Ensayo Sobre Definición de CienciaDokumen6 halamanEnsayo Sobre Definición de CienciaTania DelgadoBelum ada peringkat
- Ejercicio 10 11 12Dokumen3 halamanEjercicio 10 11 12Pedro David Gutierrez MezaBelum ada peringkat