Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Chapter 3Dokumen10 halamanChapter 3Noor Faizah ZohardinBelum ada peringkat
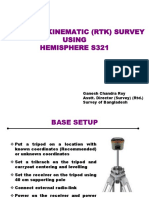
- Real Time Kinematic (RTK) Survey Using Hemisphere S321Dokumen22 halamanReal Time Kinematic (RTK) Survey Using Hemisphere S321Shafiqul HasanBelum ada peringkat
- Locating Places and Telling Time On EarthDokumen33 halamanLocating Places and Telling Time On EarthErvin CabangalBelum ada peringkat
- Azərbaycan Dövlət Dəniz Akademiyasi: Tərtib Edən: Osmanov ElçinDokumen11 halamanAzərbaycan Dövlət Dəniz Akademiyasi: Tərtib Edən: Osmanov ElçinФаиг ИсаевBelum ada peringkat
- Celestial Navigation TutorialDokumen23 halamanCelestial Navigation TutorialIustin Cristian100% (5)
- Unique Well Identifier Dec2000 PDFDokumen23 halamanUnique Well Identifier Dec2000 PDFSony LazarusBelum ada peringkat
- Full Test Bank For World Regional Geography 6Th Edition Lydia Mihelic Pulsipher Download PDF Docx Full Chapter ChapterDokumen36 halamanFull Test Bank For World Regional Geography 6Th Edition Lydia Mihelic Pulsipher Download PDF Docx Full Chapter Chapterlutation.liddedrztjn100% (6)
- Indan (CRS) EPSG:4201 (Authority ID) WKTDokumen6 halamanIndan (CRS) EPSG:4201 (Authority ID) WKTARSEBelum ada peringkat
- Chapter 01b Solar RadiationDokumen40 halamanChapter 01b Solar RadiationOmar AljohaniBelum ada peringkat
- The Earth As A Sphere - 025327Dokumen8 halamanThe Earth As A Sphere - 025327Baraka LoibangutiBelum ada peringkat
- Celestial Navigation BookDokumen53 halamanCelestial Navigation BookΝικολαος Βλαβιανος100% (1)
- 2 KMLDokumen11 halaman2 KMLWhisnu LinggaBelum ada peringkat
- General NavigationDokumen163 halamanGeneral NavigationYahya Yıldırım95% (21)
- Understanding Maps of EarthDokumen4 halamanUnderstanding Maps of EarthKalyana AyyaswamyBelum ada peringkat
- p.6 SST Work Book Term IDokumen78 halamanp.6 SST Work Book Term ICHARLES OMWONYBelum ada peringkat
- SURveying IIDokumen159 halamanSURveying IIpieterBelum ada peringkat
- EUROCONTROL ASTERIX CAT017 Annex A (Co-Ordinate Transformation Algorithms For The Hand-Over of Targets Between POEMS Interrogators)Dokumen16 halamanEUROCONTROL ASTERIX CAT017 Annex A (Co-Ordinate Transformation Algorithms For The Hand-Over of Targets Between POEMS Interrogators)IsaacBelum ada peringkat
- Instant Download Biochemistry 7th Edition Campbell Test Bank PDF Full ChapterDokumen32 halamanInstant Download Biochemistry 7th Edition Campbell Test Bank PDF Full Chaptertectlyunchurchij8f100% (8)
- Module 2 18ME651 Solar Energy Part 1Dokumen7 halamanModule 2 18ME651 Solar Energy Part 1Vamsi JnBelum ada peringkat
- Planetary Entry EnvironmentDokumen22 halamanPlanetary Entry EnvironmentmanoBelum ada peringkat
- Umdp 015 PDFDokumen353 halamanUmdp 015 PDFReno ChoiBelum ada peringkat
- IFA KarunaratneDokumen76 halamanIFA KarunaratneChamara PrasannaBelum ada peringkat
- G7Q4LAS1W1Dokumen7 halamanG7Q4LAS1W1Hazel RecañaBelum ada peringkat
- Geo Sample Book Ugc NetDokumen48 halamanGeo Sample Book Ugc NetNeha ChouhanBelum ada peringkat
- Latitude Entry Is Required. Wall Declination Entry Is Required. West - Positive, East - NegativeDokumen13 halamanLatitude Entry Is Required. Wall Declination Entry Is Required. West - Positive, East - Negativeandragardner1559Belum ada peringkat
- MVC, La, de - CarlenDokumen330 halamanMVC, La, de - Carlenbum5Belum ada peringkat
- SEN - KVH Gyrotrac - ManDokumen100 halamanSEN - KVH Gyrotrac - Manlucas barriosBelum ada peringkat
- GPS Blazer User Guide 12Dokumen50 halamanGPS Blazer User Guide 12abonatuorange100% (1)
- Wrinkles in Practical Navigation by S.T.S. LeckyDokumen948 halamanWrinkles in Practical Navigation by S.T.S. LeckyWhizippedBelum ada peringkat