Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Stiff NerDokumen6 halamanStiff NerNiraj ShindeBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- UTMDigital Part Time Student Services 202020211Dokumen4 halamanUTMDigital Part Time Student Services 202020211jfl2096Belum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Top Casing 2-2 of 2 PDFDokumen1 halamanTop Casing 2-2 of 2 PDFjfl2096Belum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Ga-Sht 2 PDFDokumen1 halamanGa-Sht 2 PDFjfl2096Belum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Valve Material and Size ChartDokumen444 halamanValve Material and Size Chartjfl2096Belum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Front Casing - 2 of 2Dokumen1 halamanFront Casing - 2 of 2jfl2096Belum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Side Casing 2-1 of 2Dokumen1 halamanSide Casing 2-1 of 2jfl2096Belum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Piping PipeDokumen18 halamanPiping Pipejfl2096Belum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- I So Creation LogDokumen3 halamanI So Creation Logjfl2096Belum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- BOM Listing for PartsDokumen1 halamanBOM Listing for Partsjfl2096Belum ada peringkat
- Side Casing 1-2 of 2Dokumen1 halamanSide Casing 1-2 of 2jfl2096Belum ada peringkat
- Top Casing 3-1 of 1Dokumen1 halamanTop Casing 3-1 of 1jfl2096Belum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Ga-Sht 2Dokumen1 halamanGa-Sht 2jfl2096Belum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Top Casing 1-1 of 1Dokumen1 halamanTop Casing 1-1 of 1jfl2096Belum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- AVEVA NET Fundamentals GuideDokumen152 halamanAVEVA NET Fundamentals Guidejfl2096Belum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Side Casing 1-1 of 2Dokumen1 halamanSide Casing 1-1 of 2jfl2096Belum ada peringkat
- AVEVA Oracle Components Installation GuideDokumen216 halamanAVEVA Oracle Components Installation Guidejfl2096Belum ada peringkat
- Top Casing 2-2 of 2Dokumen1 halamanTop Casing 2-2 of 2jfl2096Belum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- AVEVA NET Dashboard User Guide 5.0.2Dokumen127 halamanAVEVA NET Dashboard User Guide 5.0.2jfl2096Belum ada peringkat
- CIDECT Design Guide 9Dokumen213 halamanCIDECT Design Guide 9paris06250% (2)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Zavaruvanje BrosuraDokumen28 halamanZavaruvanje BrosuraBlagoja Anna SotirovskiBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Santos GLNG Project-Design & Construction Drawings PDFDokumen209 halamanSantos GLNG Project-Design & Construction Drawings PDFjfl2096Belum ada peringkat
- 30-Year Mortgage Loan SummaryDokumen20 halaman30-Year Mortgage Loan Summaryjfl2096Belum ada peringkat
- Guidelines For SMAWDokumen5 halamanGuidelines For SMAWjfl2096Belum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- AISC Design Guide 02 Errata Steel and Composite Beams With Web Openings PDFDokumen15 halamanAISC Design Guide 02 Errata Steel and Composite Beams With Web Openings PDFFernando Gutiérrez UrzúaBelum ada peringkat
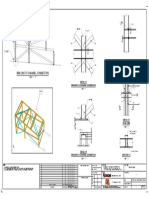
- Panel Steel Structure Supports RevB 05042019-Layout5Dokumen1 halamanPanel Steel Structure Supports RevB 05042019-Layout5jfl2096Belum ada peringkat
- AWS - Welding SymbolsDokumen1 halamanAWS - Welding SymbolsAli Saifullizan IsmailBelum ada peringkat
- Structural Steel Welding - Semih Genculu, P.EDokumen18 halamanStructural Steel Welding - Semih Genculu, P.ErobersasmitaBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- DWG Ld21 2 WHPB T 4011 Ma 002 Rev A (Commented)Dokumen3 halamanDWG Ld21 2 WHPB T 4011 Ma 002 Rev A (Commented)jfl2096Belum ada peringkat
- JOB-1904 - Panel Steel Structure Supports RevB 05042019-Layout4Dokumen1 halamanJOB-1904 - Panel Steel Structure Supports RevB 05042019-Layout4jfl2096Belum ada peringkat
- Business Mathematics: Week 9: DifferentiationDokumen15 halamanBusiness Mathematics: Week 9: DifferentiationBorhan Nordin DaudBelum ada peringkat
- Unit 3 Reference Material PDFDokumen93 halamanUnit 3 Reference Material PDFRazinBelum ada peringkat
- Pre-Calc Trig IdentitiesDokumen1 halamanPre-Calc Trig Identitiessolikan45Belum ada peringkat
- Convert Decimal to Binary with Division or PowersDokumen7 halamanConvert Decimal to Binary with Division or PowersAnas BacmBelum ada peringkat
- Cheat SheetDokumen1 halamanCheat SheetHinaJamilBelum ada peringkat
- Numbers (0, 1, 2, 3,... ) Are Defined To Be Natural Numbers, Including Zero, That Does Not ContainDokumen9 halamanNumbers (0, 1, 2, 3,... ) Are Defined To Be Natural Numbers, Including Zero, That Does Not ContainRomela EspedidoBelum ada peringkat
- Fundamental laws of set algebra in 40 charactersDokumen4 halamanFundamental laws of set algebra in 40 charactersTan Li KarBelum ada peringkat
- Stata OperatorsDokumen2 halamanStata OperatorsRosetta RennerBelum ada peringkat
- Number System Simplification Study MaterialDokumen10 halamanNumber System Simplification Study MaterialSidharth PandaBelum ada peringkat
- Recurring Decimals ConversionsDokumen18 halamanRecurring Decimals ConversionsNiharika ShahBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rules of Inference: Valid Arguments and Quantified StatementsDokumen70 halamanRules of Inference: Valid Arguments and Quantified StatementsHarshitha DeviBelum ada peringkat
- Number and Operations-Fractions: Grade 3Dokumen3 halamanNumber and Operations-Fractions: Grade 3Bill LeeBelum ada peringkat
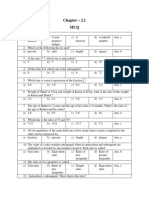
- Chapter - 2.1 MCQDokumen17 halamanChapter - 2.1 MCQBla& BlaBelum ada peringkat
- Proofs of ValidityDokumen3 halamanProofs of ValiditymxrcuryyyBelum ada peringkat
- Reducing Fractions (A) : Instructions: Reduce Each Fraction To Its Lowest TermsDokumen2 halamanReducing Fractions (A) : Instructions: Reduce Each Fraction To Its Lowest TermsMark Christian Dimson GalangBelum ada peringkat
- Add and subtract fractions with like denominatorsDokumen2 halamanAdd and subtract fractions with like denominatorsAhilem AhiBelum ada peringkat
- Chapter I-VDokumen91 halamanChapter I-VMd MohinBelum ada peringkat
- Module 7 AssignmentDokumen17 halamanModule 7 AssignmentHamza Ali100% (2)
- Lesson 4.7 - Percents and DecimalsDokumen21 halamanLesson 4.7 - Percents and Decimalsehystad100% (1)
- Dividing Mixed Fractions WorksheetDokumen1 halamanDividing Mixed Fractions Worksheetben chordBelum ada peringkat
- Boolean Algebra & Logic GatesDokumen45 halamanBoolean Algebra & Logic Gateszeeshan jamilBelum ada peringkat
- An Introduction To Mathematical Proofs Notes For Math 3034: Jimmy T. ArnoldDokumen28 halamanAn Introduction To Mathematical Proofs Notes For Math 3034: Jimmy T. ArnoldCarl PiaoBelum ada peringkat
- Rational Numbers wks-1 PDFDokumen2 halamanRational Numbers wks-1 PDFSatish HegdeBelum ada peringkat
- Short DivisionDokumen7 halamanShort DivisionSuweli SelamatBelum ada peringkat
- Books Doubtnut Question BankDokumen99 halamanBooks Doubtnut Question BankAayush BhartiBelum ada peringkat
- Webercoursenotes PDFDokumen146 halamanWebercoursenotes PDFvanaj123Belum ada peringkat
- ADMU Connectives Compound PropositionsDokumen3 halamanADMU Connectives Compound PropositionsJian Patrieck BuendiaBelum ada peringkat
- Fractions PDFDokumen44 halamanFractions PDFJohn Pridman100% (1)
- Discrete MathematicsDokumen21 halamanDiscrete MathematicsMAHENDRABelum ada peringkat
- MATHDokumen10 halamanMATHSherylyn BanaciaBelum ada peringkat
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormDari EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormPenilaian: 5 dari 5 bintang5/5 (5)
- Psychology Behind Mathematics - The Comprehensive GuideDari EverandPsychology Behind Mathematics - The Comprehensive GuideBelum ada peringkat
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingDari EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingPenilaian: 4.5 dari 5 bintang4.5/5 (21)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Dari EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Belum ada peringkat
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsDari EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsPenilaian: 5 dari 5 bintang5/5 (2)