Anda mungkin juga menyukai
- Valve and Transistor Audio AmplifiersDari EverandValve and Transistor Audio AmplifiersPenilaian: 4 dari 5 bintang4/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- PLL and VCODokumen35 halamanPLL and VCOG RAJESHBelum ada peringkat
- Exercises in Electronics: Operational Amplifier CircuitsDari EverandExercises in Electronics: Operational Amplifier CircuitsPenilaian: 3 dari 5 bintang3/5 (1)
- PLL Notes Tutorial 2Dokumen40 halamanPLL Notes Tutorial 2Mpho SebeelaBelum ada peringkat
- Power AmplifierDokumen37 halamanPower AmplifierSristick100% (6)
- Phase-Locked Loop (PLL)Dokumen40 halamanPhase-Locked Loop (PLL)palakBelum ada peringkat
- Application Note. PLL Jitter Measurements.: PurposeDokumen34 halamanApplication Note. PLL Jitter Measurements.: PurposeAustin ShiBelum ada peringkat
- PLL Intro 594a s05Dokumen46 halamanPLL Intro 594a s05jaberyemeniBelum ada peringkat
- PLL 5ed PDFDokumen341 halamanPLL 5ed PDFadewale2001Belum ada peringkat
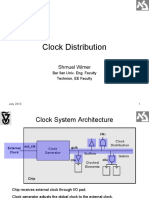
- Clock Distribution: Shmuel WimerDokumen75 halamanClock Distribution: Shmuel Wimersenthilkumar100% (1)
- DFT Interview Questions and Answers: 1. Re: Handling Reset During Transition Fault Pattern GenerationDokumen10 halamanDFT Interview Questions and Answers: 1. Re: Handling Reset During Transition Fault Pattern GenerationShankhadeep DasBelum ada peringkat
- Chapter 4Dokumen17 halamanChapter 4haiqa suhailBelum ada peringkat
- PLL 5edDokumen341 halamanPLL 5edliBelum ada peringkat
- Design For Testability NotesDokumen41 halamanDesign For Testability NotesNaga Nithesh100% (3)
- Demystifying The PLLDokumen14 halamanDemystifying The PLLgovindcoolBelum ada peringkat
- Introduction To PLLDokumen22 halamanIntroduction To PLLKhaled GamalBelum ada peringkat
- Lect 4 PLL 1Dokumen29 halamanLect 4 PLL 1Trần Tấn ĐạiBelum ada peringkat
- Phase-Locked Loop (PLL) : EE174 - SJSU Tan NguyenDokumen40 halamanPhase-Locked Loop (PLL) : EE174 - SJSU Tan NguyenriponkumarBelum ada peringkat
- Phase Lock LoopDokumen21 halamanPhase Lock LoopMANOJ MBelum ada peringkat
- Elc401af17 L2 PLL PDFDokumen19 halamanElc401af17 L2 PLL PDFEslam Asaad MahmoudBelum ada peringkat
- Introduction To PLLDokumen40 halamanIntroduction To PLLPrateek MudgilBelum ada peringkat
- Lab 3: Phase-Locked Loop: University of California at Berkeley Department of Electrical Engineering and Computer SciencesDokumen4 halamanLab 3: Phase-Locked Loop: University of California at Berkeley Department of Electrical Engineering and Computer Sciencesashokkmr123Belum ada peringkat
- Icslab Training Manual (Vco+Pll)Dokumen10 halamanIcslab Training Manual (Vco+Pll)Yến VươngBelum ada peringkat
- Lab TutorialDokumen10 halamanLab TutorialMD JamalBelum ada peringkat
- Phase Locked Loop (PLL) : Study, Modeling & Simulation in MatlabDokumen18 halamanPhase Locked Loop (PLL) : Study, Modeling & Simulation in MatlabMohammad Ayatullah MaktoomBelum ada peringkat
- ps6 - Phase Detector PDFDokumen4 halamanps6 - Phase Detector PDFjlissa5262Belum ada peringkat
- ECE 3013-Linear Integrated Circuits: Module-ViDokumen89 halamanECE 3013-Linear Integrated Circuits: Module-Visai manikantaBelum ada peringkat
- Phase Locked Loops (PLL)Dokumen10 halamanPhase Locked Loops (PLL)Rohan ZendeBelum ada peringkat
- BITS Pilani: Pilani - Dubai - Goa - HyderabadDokumen34 halamanBITS Pilani: Pilani - Dubai - Goa - HyderabadanantBelum ada peringkat
- PLL TutorialDokumen46 halamanPLL Tutorialnucleur_13Belum ada peringkat
- OBJECT - Phase-Locked Loop Basics, PLL: Figure 1. PLL Block DiagramDokumen4 halamanOBJECT - Phase-Locked Loop Basics, PLL: Figure 1. PLL Block DiagramljhamnaniBelum ada peringkat
- Chapter 15 PDFDokumen42 halamanChapter 15 PDFPugazhendhi MuthuBelum ada peringkat
- Radio-Frequency Circuits6Dokumen18 halamanRadio-Frequency Circuits6mumtazBelum ada peringkat
- Mixed Signal Lecture PLLDokumen15 halamanMixed Signal Lecture PLLsheikhdanish17Belum ada peringkat
- SDIC 11marks (Q & A) (Unit 2)Dokumen10 halamanSDIC 11marks (Q & A) (Unit 2)Ganapathy RamadossBelum ada peringkat
- PEexp01 Comp IDokumen10 halamanPEexp01 Comp Ijackychen101Belum ada peringkat
- Behavioral Modeling of PLL Using Verilog-ADokumen3 halamanBehavioral Modeling of PLL Using Verilog-Auam22Belum ada peringkat
- Applications:: F F K VDokumen4 halamanApplications:: F F K VAssini HussainBelum ada peringkat
- EEI 4001 Industrial Electronics Lab #3: Phase Locked LoopDokumen8 halamanEEI 4001 Industrial Electronics Lab #3: Phase Locked Looptrem tremsonBelum ada peringkat
- PLDDokumen34 halamanPLDAmit JoshiBelum ada peringkat
- PLL DesignDokumen6 halamanPLL DesignMohamedElsawiBelum ada peringkat
- Literature Review On PLLDokumen6 halamanLiterature Review On PLLbat2bad2Belum ada peringkat
- Chapter 09 Phase-Locked LoopsDokumen82 halamanChapter 09 Phase-Locked LoopsMuresan GabrielBelum ada peringkat
- PLLbasicsDokumen120 halamanPLLbasicsvisava789Belum ada peringkat
- Phase Locked LoopsDokumen82 halamanPhase Locked Loopssureshy-ee213Belum ada peringkat
- V (T) Tan (R (T) ) : Neither CausalDokumen6 halamanV (T) Tan (R (T) ) : Neither CausalAdarshBelum ada peringkat
- L050 LPLLs I (2UP) BDokumen18 halamanL050 LPLLs I (2UP) BMustafaMuhammadBelum ada peringkat
- PLL & ApplicationsDokumen7 halamanPLL & Applications20H51A04K4-CHINTALAPATI MEGHANA B.Tech ECE (2020-24)Belum ada peringkat
- Cmos InverterDokumen64 halamanCmos InverterAkashBelum ada peringkat
- Lect 5 PLL 2Dokumen18 halamanLect 5 PLL 2Trần Tấn ĐạiBelum ada peringkat
- Mt-086 Tutorial: Fundamentals of Phase Locked Loops (PLLS)Dokumen10 halamanMt-086 Tutorial: Fundamentals of Phase Locked Loops (PLLS)gezahegnBelum ada peringkat
- PLL ReportDokumen5 halamanPLL Reportعبدالله طلبه المغربيBelum ada peringkat
- Schmitt TriggerDokumen18 halamanSchmitt TriggerSusmita AdhikaryBelum ada peringkat
- Integratedelectronics (Unit3) Phase Locked LoopDokumen5 halamanIntegratedelectronics (Unit3) Phase Locked LoopYogeshwaranBelum ada peringkat
- Lecture 5Dokumen51 halamanLecture 5abd rocksBelum ada peringkat
- PLL c2000 Ti DataDokumen26 halamanPLL c2000 Ti DatajaiminBelum ada peringkat
- Study of Analog Phase-Locked Loop (APLL) : Exercise 9Dokumen10 halamanStudy of Analog Phase-Locked Loop (APLL) : Exercise 9جمال سينغBelum ada peringkat
- Unitt 4Dokumen7 halamanUnitt 4lalit24006Belum ada peringkat
- AC Lab8 Assignment 20BEC022Dokumen5 halamanAC Lab8 Assignment 20BEC022Himanshu RaiBelum ada peringkat
- Lec 24Dokumen14 halamanLec 24sadaf asmaBelum ada peringkat
- Designing Analog Chips: H. R. CamenzindDokumen186 halamanDesigning Analog Chips: H. R. CamenzindSathyanarayana RaoBelum ada peringkat
- Sram Memory CellDokumen20 halamanSram Memory CellSathyanarayana RaoBelum ada peringkat
- TP LeakagePowerOptimizationFlowDokumen11 halamanTP LeakagePowerOptimizationFlowSathyanarayana RaoBelum ada peringkat
- F6 Hasan - RFID TicketingDokumen5 halamanF6 Hasan - RFID TicketingSathyanarayana RaoBelum ada peringkat
- Arthashastra by ChanakyaDokumen360 halamanArthashastra by Chanakyaapi-27483824Belum ada peringkat
- Io in VlsiDokumen32 halamanIo in VlsiSathyanarayana RaoBelum ada peringkat
- Intersil 82c54 - 5Dokumen22 halamanIntersil 82c54 - 5anjanbsBelum ada peringkat
- CD4093BC Quad 2-Input NAND Schmitt Trigger: General Description FeaturesDokumen8 halamanCD4093BC Quad 2-Input NAND Schmitt Trigger: General Description FeaturesClovis BentoBelum ada peringkat
- Tutorial Burn Arduino Bootloader Into An Fresh ATmega2560Dokumen3 halamanTutorial Burn Arduino Bootloader Into An Fresh ATmega2560Gustavo Seben ColleBelum ada peringkat
- 8085 Microprocessor Architecture, Pin DiagramDokumen10 halaman8085 Microprocessor Architecture, Pin DiagramSachin Jaysenan0% (1)
- Lab Activity #1:: University of The EastDokumen7 halamanLab Activity #1:: University of The Eastdawj jdwijBelum ada peringkat
- Master Learning MapsDokumen10 halamanMaster Learning Mapsuzairhasan09Belum ada peringkat
- Cmos Notes PDFDokumen32 halamanCmos Notes PDFShwetaGautamBelum ada peringkat
- Service Manual: SharpDokumen21 halamanService Manual: SharpMarco MinottiBelum ada peringkat
- MIT-Michael H. PerrottDokumen535 halamanMIT-Michael H. Perrottshuhaoyi5Belum ada peringkat
- Pic 16 C 6 XDokumen336 halamanPic 16 C 6 XNataLeeBelum ada peringkat
- Gerbang LogikaDokumen26 halamanGerbang LogikaErnesto AntonioBelum ada peringkat
- Time: 3 Hours Total Marks: 70: PD PLDokumen1 halamanTime: 3 Hours Total Marks: 70: PD PLDeepanshi RuhelaBelum ada peringkat
- KS0649Dokumen15 halamanKS0649Linzaw WinBelum ada peringkat
- 16 Master Slave Flip FlopsDokumen3 halaman16 Master Slave Flip FlopsTADeBelum ada peringkat
- American Mega Trends Int. & Phoenix BIOS Beep CodesDokumen6 halamanAmerican Mega Trends Int. & Phoenix BIOS Beep CodesHasan MahmudBelum ada peringkat
- 2nm Semiconductor TechnologyDokumen20 halaman2nm Semiconductor TechnologyYash ChaudhariBelum ada peringkat
- BJT ManufacturingDokumen36 halamanBJT ManufacturingM. AhmedBelum ada peringkat
- Sana'a University Faculty of Engineering Electrical DeptDokumen23 halamanSana'a University Faculty of Engineering Electrical DeptAliasa ZaidBelum ada peringkat
- Lecture 21Dokumen21 halamanLecture 21KumarBelum ada peringkat
- Electronic DiceDokumen2 halamanElectronic DiceBilalabdullahBelum ada peringkat
- MOSFET Chapter - 5Dokumen73 halamanMOSFET Chapter - 5田佳生Belum ada peringkat
- Solution For All Problems in Chapter 9Dokumen3 halamanSolution For All Problems in Chapter 9Rahmat Hidayat100% (1)
- (Biasing Bipolar Junction Transistors) : Electronics Lab-Experiment 6Dokumen5 halaman(Biasing Bipolar Junction Transistors) : Electronics Lab-Experiment 6Mhmd MsttBelum ada peringkat
- 22131c PDFDokumen24 halaman22131c PDFAdilsonAmorimBelum ada peringkat
- NPN Silicon RF Power Transistor: Description: ASI 2N5945 Package Style .280 4L StudDokumen1 halamanNPN Silicon RF Power Transistor: Description: ASI 2N5945 Package Style .280 4L StudGmo HdezBelum ada peringkat
- How To Convert PCB To Schematic DiagramDokumen26 halamanHow To Convert PCB To Schematic DiagramjackBelum ada peringkat
- Low Power VLSI BooksDokumen4 halamanLow Power VLSI BooksManoharan KandasamyBelum ada peringkat