Anda mungkin juga menyukai
- Diapositivas-Gestión de Inventarios-José Contreras PDFDokumen149 halamanDiapositivas-Gestión de Inventarios-José Contreras PDFJairo Ricardo Alvarez OrtizBelum ada peringkat
- Tarea 3 - Presentar Evaluación Ecuaciones Diferenciales de Primer Orden y Orden SuperiorDokumen4 halamanTarea 3 - Presentar Evaluación Ecuaciones Diferenciales de Primer Orden y Orden SuperiorJairo Ricardo Alvarez Ortiz100% (2)
- Fase 4 - Comprender El Concepto de Equilibrio General de Intercambio CompetitivoDokumen11 halamanFase 4 - Comprender El Concepto de Equilibrio General de Intercambio CompetitivoJairo Ricardo Alvarez Ortiz100% (1)
- Unidad 1 Tarea 1 Informe Sobre Generalidades de TransporteDokumen12 halamanUnidad 1 Tarea 1 Informe Sobre Generalidades de TransporteJairo Ricardo Alvarez OrtizBelum ada peringkat
- Modos y Medios de TransporteDokumen10 halamanModos y Medios de TransporteJairo Ricardo Alvarez OrtizBelum ada peringkat
- Actividad 4. Presentar CuestionarioDokumen6 halamanActividad 4. Presentar CuestionarioJairo Ricardo Alvarez OrtizBelum ada peringkat
- Evaluación Aspecto Económico Del Proyecto - Crema Exfoliante de CafeDokumen55 halamanEvaluación Aspecto Económico Del Proyecto - Crema Exfoliante de CafeJairo Ricardo Alvarez Ortiz0% (1)
- Taller 2 Investigacion de OperacionesDokumen9 halamanTaller 2 Investigacion de OperacionesJairo Ricardo Alvarez OrtizBelum ada peringkat
- Recurso de Apelacion de Auto - Yolanda Ernestina Calderon de Medina, y Moises Medina PuenteDokumen6 halamanRecurso de Apelacion de Auto - Yolanda Ernestina Calderon de Medina, y Moises Medina PuenteABOGADO PERCY CORONADO C.Belum ada peringkat
- Tipos de Ciencia y Sus CaracteristicasDokumen6 halamanTipos de Ciencia y Sus CaracteristicasNERIO HUAMANBelum ada peringkat
- Ensayo (Resolutivo)Dokumen5 halamanEnsayo (Resolutivo)Karla CalderónBelum ada peringkat
- Lavado de ManosDokumen14 halamanLavado de ManosRosalinda Ines Hinostroza LoretoBelum ada peringkat
- Taller N 2Dokumen2 halamanTaller N 2Daniel ValeroBelum ada peringkat
- Au Plus 2 Transcripcion U02Dokumen2 halamanAu Plus 2 Transcripcion U02JBelum ada peringkat
- Diferencias Comparativas Entre Niños Estímulados y No Estimulados - María Laura CastedoDokumen8 halamanDiferencias Comparativas Entre Niños Estímulados y No Estimulados - María Laura CastedoErika Duarte CalderónBelum ada peringkat
- Caso Daniel H - Analisis de Caso TAREA #2 PSICOMETRIA IDokumen5 halamanCaso Daniel H - Analisis de Caso TAREA #2 PSICOMETRIA IFATIMA ANDREA RODRIGUEZ ALEJOSBelum ada peringkat
- Estrategias Efectivas para Que Vendas Lo Que Quieras A Quien QuierasDokumen14 halamanEstrategias Efectivas para Que Vendas Lo Que Quieras A Quien QuierasvictorBelum ada peringkat
- Museo Arqueologico y de Sitio en Malinalco Tesis de Arquitectura PDFDokumen224 halamanMuseo Arqueologico y de Sitio en Malinalco Tesis de Arquitectura PDFJonathan Sanchez100% (1)
- Examen VANDokumen2 halamanExamen VANCarolina V100% (1)
- Protocolo - de CicloplegiaDokumen6 halamanProtocolo - de Cicloplegiajohnny david chavez beltran100% (1)
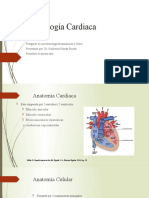
- Fisiología Cardiaca 2018Dokumen23 halamanFisiología Cardiaca 2018Guillermo PinedaBelum ada peringkat
- AtelectasiaDokumen16 halamanAtelectasiapancardo100% (1)
- Practica 6 Ruta Estatica ConfiguracionDokumen31 halamanPractica 6 Ruta Estatica ConfiguracionCarlos Danniel FloresBelum ada peringkat
- Practica Clase Sesión 05 - AdministraciónDokumen9 halamanPractica Clase Sesión 05 - AdministraciónYlder Heli Vargas AlvaBelum ada peringkat
- Formato de Un Proyecto Interdisciplinario Academia REVDokumen4 halamanFormato de Un Proyecto Interdisciplinario Academia REVJorge NúñezBelum ada peringkat
- El Caso Carlos PublicacionDokumen21 halamanEl Caso Carlos PublicacionSusana Beatriz GarecaBelum ada peringkat
- Control Calidad1Dokumen7 halamanControl Calidad1CrisBelum ada peringkat
- Dinamica - La VentanaDokumen2 halamanDinamica - La VentanaChristian SJ100% (1)
- Evaluación Por CompetenciasDokumen15 halamanEvaluación Por CompetenciasRamona González VallejosBelum ada peringkat
- Recursos Argumentativos-Lengua y Lit PDFDokumen1 halamanRecursos Argumentativos-Lengua y Lit PDFHeidi VillaBelum ada peringkat
- La Vida de Los MamíferosDokumen1 halamanLa Vida de Los MamíferosJuan PerezBelum ada peringkat
- Teoria de La Evolucion de La TierraDokumen3 halamanTeoria de La Evolucion de La TierraLiliana MiseBelum ada peringkat
- Contrato VerbisDokumen8 halamanContrato VerbisAntonio Nereira Carrasquilla100% (2)
- CV GUILLERMO CAMAHUALI 2015 Actualizado PDFDokumen3 halamanCV GUILLERMO CAMAHUALI 2015 Actualizado PDFG Privat PrivatBelum ada peringkat
- Chunchos Reseña HistóricaDokumen2 halamanChunchos Reseña HistóricaJULIO100% (1)
- Embriogénesis Del Aparato Genital MasculinoDokumen17 halamanEmbriogénesis Del Aparato Genital MasculinoAna Cristina Sanchez ZangBelum ada peringkat
- 6 GradomatematicaDokumen113 halaman6 GradomatematicaMaiteBelum ada peringkat
- 1 - Temporada de Caza - Kate RudolphDokumen172 halaman1 - Temporada de Caza - Kate RudolphMaigualida Godoy EstabaBelum ada peringkat