Anda mungkin juga menyukai
- Wang 2017Dokumen13 halamanWang 2017gemechuBelum ada peringkat
- Sidereal TimeDokumen3 halamanSidereal TimegemechuBelum ada peringkat
- Zeng 2016Dokumen15 halamanZeng 2016gemechuBelum ada peringkat
- Zeng 2016Dokumen15 halamanZeng 2016gemechuBelum ada peringkat
- Zeng 2016Dokumen15 halamanZeng 2016gemechuBelum ada peringkat
- Zeng 2016Dokumen15 halamanZeng 2016gemechuBelum ada peringkat
- BCJRDokumen1 halamanBCJRgemechuBelum ada peringkat
- Class Assesement1Dokumen6 halamanClass Assesement1gemechuBelum ada peringkat
- BCJRDokumen3 halamanBCJRgemechuBelum ada peringkat
- BCJRDokumen3 halamanBCJRgemechuBelum ada peringkat
- Class Assesement1Dokumen10 halamanClass Assesement1gemechuBelum ada peringkat
- Cover PageDokumen1 halamanCover PagegemechuBelum ada peringkat
- Class Assesement1Dokumen1 halamanClass Assesement1gemechuBelum ada peringkat
- Lecture22 DigitalFilters04 0Dokumen9 halamanLecture22 DigitalFilters04 0gemechuBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Multi Spindl Drilling MachineDokumen38 halamanMulti Spindl Drilling MachineBoopathi KalaiBelum ada peringkat
- BSM BWMP - D1 and D2Dokumen34 halamanBSM BWMP - D1 and D2Adnan DjamalBelum ada peringkat
- Tps 53014Dokumen27 halamanTps 53014nebiyu mulugetaBelum ada peringkat
- Symbolic TBDokumen512 halamanSymbolic TBJanet LeongBelum ada peringkat
- BS en 50483 6 2009Dokumen27 halamanBS en 50483 6 2009Shara LogisticBelum ada peringkat
- Roland Sands Design US CatalogDokumen56 halamanRoland Sands Design US Catalogsema2210Belum ada peringkat
- Material Characterization of Sugarcane Bagasseepoxy Composites For - 2022Dokumen5 halamanMaterial Characterization of Sugarcane Bagasseepoxy Composites For - 2022bakhrul ilmiBelum ada peringkat
- D Praveen Kumar ChaubeyDokumen2 halamanD Praveen Kumar ChaubeyyouvsyouBelum ada peringkat
- PDS HEMPATEX ENAMEL 56360 en-GB PDFDokumen2 halamanPDS HEMPATEX ENAMEL 56360 en-GB PDFMohamed ChelfatBelum ada peringkat
- Muhammad Akif Naeem Open Ended Lab Signals and SystemDokumen20 halamanMuhammad Akif Naeem Open Ended Lab Signals and SystemMuhammad Akif NaeemBelum ada peringkat
- Literature ReviewDokumen2 halamanLiterature ReviewkhairulBelum ada peringkat
- Standards of MeasurementDokumen12 halamanStandards of MeasurementShubham KheraBelum ada peringkat
- Se MeterDataProcessingDokumen83 halamanSe MeterDataProcessingbzkxtBelum ada peringkat
- Led Linear Emergency 2021Dokumen4 halamanLed Linear Emergency 2021Sugumaran LakshmananBelum ada peringkat
- Castrol - Iceomatic SW 68Dokumen7 halamanCastrol - Iceomatic SW 68advantage025Belum ada peringkat
- Pravin Yesubon.Y: and Social Responsibility (PSSR) and Personal Survival Techniques (PST)Dokumen2 halamanPravin Yesubon.Y: and Social Responsibility (PSSR) and Personal Survival Techniques (PST)shaBelum ada peringkat
- Production Support ProcessDokumen15 halamanProduction Support ProcesssantoshBelum ada peringkat
- Harmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesDokumen5 halamanHarmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesJose GalvanBelum ada peringkat
- Tan Tzu enDokumen68 halamanTan Tzu enLoc HuynhBelum ada peringkat
- Guide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsDokumen12 halamanGuide To Using In-Situ Tensile Pull-Off Tests To Evaluate Bond of Concrete Surface MaterialsMauricio Javier León TejadaBelum ada peringkat
- Group 2 (ME 03) - Hoa Phat GroupDokumen42 halamanGroup 2 (ME 03) - Hoa Phat GroupLê Thành DanhBelum ada peringkat
- E-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh PathakDokumen9 halamanE-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh Pathakdharshinee1961Belum ada peringkat
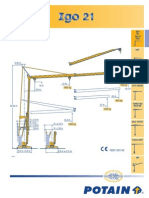
- Potain Igo 21 PDFDokumen4 halamanPotain Igo 21 PDFMarco CruzBelum ada peringkat
- Apollo Experience Report Electronic Systems Test Program Accomplishments and ResultsDokumen70 halamanApollo Experience Report Electronic Systems Test Program Accomplishments and ResultsBob AndrepontBelum ada peringkat
- Pure Sine Wave Inverter For House BackupDokumen44 halamanPure Sine Wave Inverter For House BackupKrista Jackson100% (1)
- Uk Fat 2017Dokumen178 halamanUk Fat 2017Christopher J MillsBelum ada peringkat
- Plastic Coatings: Advanced Polymer Technologies ForDokumen13 halamanPlastic Coatings: Advanced Polymer Technologies ForFazlul HoqueBelum ada peringkat
- TDA1517Dokumen15 halamanTDA1517Dave ManakisBelum ada peringkat
- Foaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingDokumen27 halamanFoaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingArshad SiddiqueeBelum ada peringkat
- Implementing Routing Facilities For Branch Offices and Mobile WorkersDokumen180 halamanImplementing Routing Facilities For Branch Offices and Mobile WorkersAlejandro Cordero OrdoñezBelum ada peringkat