Anda mungkin juga menyukai
- Telefonía Leonardo Arellano 10 C TelefoniaDokumen26 halamanTelefonía Leonardo Arellano 10 C TelefoniaIng. Leonardo ArellanoBelum ada peringkat
- Plan de Tesis Sistema de Seguridad Version Final en PDFDokumen10 halamanPlan de Tesis Sistema de Seguridad Version Final en PDFIng. Leonardo ArellanoBelum ada peringkat
- Carta de MenusDokumen6 halamanCarta de MenusIng. Leonardo ArellanoBelum ada peringkat
- Menu A La CartaDokumen1 halamanMenu A La CartaIng. Leonardo ArellanoBelum ada peringkat
- Aprendizaje y Memoria en PsicologíaDokumen5 halamanAprendizaje y Memoria en PsicologíaConsuelo CanoBelum ada peringkat
- Fallo Del SEA Donde Amplía Plazo para Realizar Observaciones Ciudadanas Al Proyecto Puerto Exterior.Dokumen7 halamanFallo Del SEA Donde Amplía Plazo para Realizar Observaciones Ciudadanas Al Proyecto Puerto Exterior.José Salgado NúñezBelum ada peringkat
- Sistemas de Costo EstándarDokumen10 halamanSistemas de Costo EstándarEmanuel IduarteBelum ada peringkat
- TalabarteríaDokumen21 halamanTalabarteríaMEIH5año MalfussiBelum ada peringkat
- Retos y Demandas Del Siglo XXIDokumen6 halamanRetos y Demandas Del Siglo XXIMaricruz JaramilloBelum ada peringkat
- Metodo de RigidezDokumen18 halamanMetodo de RigidezAnonymous G6a98ENBelum ada peringkat
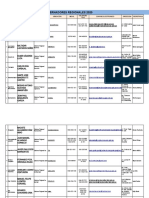
- Directorio Gobernadores Regionales 22 de Enero 2020Dokumen7 halamanDirectorio Gobernadores Regionales 22 de Enero 2020LIZETBelum ada peringkat
- Pueblos Indígenas Edición San Luis PotosíDokumen14 halamanPueblos Indígenas Edición San Luis PotosíJaimicocamilBelum ada peringkat
- Libro - Vian - OconDokumen52 halamanLibro - Vian - OconUlises ValienteBelum ada peringkat
- Kiucxzsaser 5Dokumen175 halamanKiucxzsaser 5Sandra Andrade alviBelum ada peringkat
- Los Orígenes Del Comercio Ambulante en La Ciudad de MéxicoDokumen127 halamanLos Orígenes Del Comercio Ambulante en La Ciudad de MéxicoCarlos QuirarteBelum ada peringkat
- Lenguaje CorporalDokumen7 halamanLenguaje CorporalFlex ChrnosBelum ada peringkat
- Súper Colección Diplomas para Fin de CursoDokumen30 halamanSúper Colección Diplomas para Fin de CursoGrace StephanieBelum ada peringkat
- Examen AvesDokumen3 halamanExamen AvesJuan Jose GomezBelum ada peringkat
- Plan de Estudios 2011 Educación BásicaDokumen13 halamanPlan de Estudios 2011 Educación BásicaEfrén GutierrezBelum ada peringkat
- Caligrafia Araguaney 4Dokumen12 halamanCaligrafia Araguaney 4Administrador Classroom75% (4)
- Ética ClásicaDokumen5 halamanÉtica ClásicaLaura GiraldoBelum ada peringkat
- 2008SaludMental AtencionDirectaDokumen173 halaman2008SaludMental AtencionDirectaJulio César NuñezBelum ada peringkat
- Convenios Vigentes - UMSADokumen39 halamanConvenios Vigentes - UMSADaniel Murillo BarbozaBelum ada peringkat
- Un Líder Puede Interpretarse Como Un TestaferroDokumen2 halamanUn Líder Puede Interpretarse Como Un TestaferroKarla Yamarte GuanipaBelum ada peringkat
- Práctica Forense Civil y Mercantil: Unidad 3. Juicios OralesDokumen3 halamanPráctica Forense Civil y Mercantil: Unidad 3. Juicios OralesSandra Perez GarciaBelum ada peringkat
- InventariosDokumen24 halamanInventariosaldoBelum ada peringkat
- Investigacion Celdas Fotovoltaicas Incam21Dokumen4 halamanInvestigacion Celdas Fotovoltaicas Incam21manuel figueroa100% (1)
- Sesion de Aprendizaje #2 de Cyt Los Alimentos Por Su FuncionDokumen7 halamanSesion de Aprendizaje #2 de Cyt Los Alimentos Por Su FuncionAnonymous o4yFF1TO100% (1)
- Manual de Orientaciones Hosting 2014Dokumen196 halamanManual de Orientaciones Hosting 2014SilCislaghiBelum ada peringkat
- Coeficiente de CV Ó KV de Una Válvula PDFDokumen3 halamanCoeficiente de CV Ó KV de Una Válvula PDFPablo VilchezBelum ada peringkat
- Creacion Centro Integral de CulturaDokumen107 halamanCreacion Centro Integral de CulturaJhon TccBelum ada peringkat
- Ejes Temáticos Microeconomia Administración EmpresasDokumen5 halamanEjes Temáticos Microeconomia Administración EmpresasCamilo Esteban GarciaBelum ada peringkat
- Cariotipo HumanoDokumen6 halamanCariotipo HumanoDaniel Marquiño Alonzo PazBelum ada peringkat
- Televisión Digital - Wikipedia, La Enciclopedia LibreDokumen19 halamanTelevisión Digital - Wikipedia, La Enciclopedia Librelizbeththor11Belum ada peringkat