Anda mungkin juga menyukai
- PMG PDFDokumen6 halamanPMG PDFrajan_2002eeeBelum ada peringkat
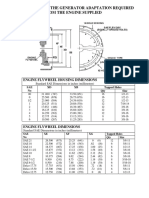
- Determining The Generator Adaptation Required From The Engine SuppliedDokumen2 halamanDetermining The Generator Adaptation Required From The Engine SuppliedolumideBelum ada peringkat
- Conversion of 3 Phase 12 Lead Alternator To Single Phase AlternatorDokumen2 halamanConversion of 3 Phase 12 Lead Alternator To Single Phase AlternatorАлександр ЩеблыкинBelum ada peringkat
- S287 Fozmula Capacitance Coolant Level Switch Data JP 24 Nov 15 3.2 Rev 2Dokumen1 halamanS287 Fozmula Capacitance Coolant Level Switch Data JP 24 Nov 15 3.2 Rev 2Parinya0% (1)
- Siemens industrial diesel and gas engines & generator setsDokumen2 halamanSiemens industrial diesel and gas engines & generator setsAlejandro SanchezBelum ada peringkat
- Installation and Maintenance: R2 Droop R1 Q2 Q1 F2 F1 N WVDokumen14 halamanInstallation and Maintenance: R2 Droop R1 Q2 Q1 F2 F1 N WVOmer HejeirBelum ada peringkat
- Specification, Controls and Accessories: AS440 Automatic Voltage Regulator (AVR)Dokumen34 halamanSpecification, Controls and Accessories: AS440 Automatic Voltage Regulator (AVR)Jan AhmedBelum ada peringkat
- Training AvrDokumen64 halamanTraining AvrCamilo Andres Cardozo FajardoBelum ada peringkat
- ACS Analogue Control Systems eDokumen12 halamanACS Analogue Control Systems eKhaled KamelBelum ada peringkat
- Synchronous Machines Rev 1Dokumen9 halamanSynchronous Machines Rev 1Nasri JamaludinBelum ada peringkat
- Leroy Somer LSA 54.2Dokumen16 halamanLeroy Somer LSA 54.2Seno PT. AAEBelum ada peringkat
- AVR341 Generator Automatic Voltage Regulator Operation ManualDokumen6 halamanAVR341 Generator Automatic Voltage Regulator Operation ManualEmanuel Arguiñarena100% (1)
- AGN 009 - Bearing LifeDokumen6 halamanAGN 009 - Bearing LifeariwibowoBelum ada peringkat
- Marelligenerators - MarineDokumen81 halamanMarelligenerators - MarineUmberto ErbaBelum ada peringkat
- DC 6 Digital Gov Data Sheet PDFDokumen4 halamanDC 6 Digital Gov Data Sheet PDFCarlos MajanoBelum ada peringkat
- Alternator TrainingDokumen93 halamanAlternator Trainingahmed elsheikhBelum ada peringkat
- BZM7X-HM-CPM250-0202-T5: Model Manufacturer Internaco B-33/B-44/B-50/B-68/B-75/B-95/B-115/B-140/B-160Dokumen7 halamanBZM7X-HM-CPM250-0202-T5: Model Manufacturer Internaco B-33/B-44/B-50/B-68/B-75/B-95/B-115/B-140/B-160Francisco Mosquera LopezBelum ada peringkat
- STAMFORD Industrial Ratings Book 2Dokumen64 halamanSTAMFORD Industrial Ratings Book 2Murali SubramaniBelum ada peringkat
- Automatic changeover switches for backup power systemsDokumen8 halamanAutomatic changeover switches for backup power systemsPaulMathewBelum ada peringkat
- Maintenance of A.C GeneratorsDokumen26 halamanMaintenance of A.C GeneratorsMohamed HamdallahBelum ada peringkat
- Woodward GovernorDokumen4 halamanWoodward GovernorAbhijit Manna100% (1)
- Réseau International: Avrs For Shunt ExcitationDokumen6 halamanRéseau International: Avrs For Shunt Excitationlpolo12100% (1)
- Governoor Heinzma NDokumen4 halamanGovernoor Heinzma NRudi HendarBelum ada peringkat
- AUTO MAINS FAILURE MODULEDokumen2 halamanAUTO MAINS FAILURE MODULESOSBelum ada peringkat
- Stamford AVR SX460 PDFDokumen4 halamanStamford AVR SX460 PDFNasredine AlainBelum ada peringkat
- For Shunt, Arep or PMG Alternators: CharacteristicsDokumen2 halamanFor Shunt, Arep or PMG Alternators: Characteristicspetergr8t1Belum ada peringkat
- ComAP Powermanagement Load Reserve Calculation - V3Dokumen4 halamanComAP Powermanagement Load Reserve Calculation - V3Luis JesusBelum ada peringkat
- Datashhet 4012-46tag2aDokumen5 halamanDatashhet 4012-46tag2aacrotech100% (1)
- ABB ContactorDokumen226 halamanABB ContactorAnthonyBelum ada peringkat
- Voltage Regulators - AVR 04-2017Dokumen4 halamanVoltage Regulators - AVR 04-2017S G BavishkumarBelum ada peringkat
- Generator Excitation Control Systems & MethodsDokumen5 halamanGenerator Excitation Control Systems & MethodsJohan GantivaBelum ada peringkat
- C10547058 PDFDokumen28 halamanC10547058 PDFParinyaBelum ada peringkat
- Micrologic 2.0A PDFDokumen154 halamanMicrologic 2.0A PDFGabriel ZorattiBelum ada peringkat
- Typical Wiring Diagram and Configuration Editor for DSE8610 MKII ModuleDokumen2 halamanTypical Wiring Diagram and Configuration Editor for DSE8610 MKII ModuleMohammad Badii Mosli0% (1)
- Semiconductor, Diode and Power Supply: Click To Edit Master Subtitle StyleDokumen61 halamanSemiconductor, Diode and Power Supply: Click To Edit Master Subtitle StylejgBelum ada peringkat
- Derating Stamford PDFDokumen1 halamanDerating Stamford PDFPowerTechBelum ada peringkat
- Guangzhou Electway Technology Co.,LtdDokumen21 halamanGuangzhou Electway Technology Co.,Ltdabdelhamed mahmoudBelum ada peringkat
- LT Motors AC Generators DC Motors Drives CatalogDokumen76 halamanLT Motors AC Generators DC Motors Drives CatalogSaravanan Mani100% (1)
- p1500-4012-46TAG2A - TDS (1500) - Gross Engine Power, Fan PowerDokumen6 halamanp1500-4012-46TAG2A - TDS (1500) - Gross Engine Power, Fan PowerKarlaBelum ada peringkat
- Load Sharing and Speed Control: Product SpecificationDokumen4 halamanLoad Sharing and Speed Control: Product SpecificationMormor OmertaBelum ada peringkat
- X20CM0985 1 Eng - V1.42Dokumen72 halamanX20CM0985 1 Eng - V1.42rushaBelum ada peringkat
- (CS-2020-048 - EN) Work Procedure For DX22 GEN ECU ReprogramingDokumen3 halaman(CS-2020-048 - EN) Work Procedure For DX22 GEN ECU ReprogramingXuân Quang PhạmBelum ada peringkat
- Basic Cummins QSK60 Engine SpecsDokumen3 halamanBasic Cummins QSK60 Engine Specskamy_8524100% (1)
- Brushless AlternatorDokumen10 halamanBrushless AlternatorArun GouthamBelum ada peringkat
- Submittal - LS Power Chambersburg - G3096 - 5.15.20Dokumen419 halamanSubmittal - LS Power Chambersburg - G3096 - 5.15.20kohatian27796105100% (2)
- Alternator Prestolite 4000Dokumen4 halamanAlternator Prestolite 4000help3rBelum ada peringkat
- Speed Gov Wiring AdjustDokumen1 halamanSpeed Gov Wiring Adjustagus sumantriBelum ada peringkat
- GOB EG1065x Manual en PDFDokumen8 halamanGOB EG1065x Manual en PDFRonaldCarrasquelBelum ada peringkat
- OPX300K2Dokumen28 halamanOPX300K2John GarnetBelum ada peringkat
- Auto Manual Mode Logic Diagram EDO BreakerDokumen2 halamanAuto Manual Mode Logic Diagram EDO BreakerGeneral Projects and Electric, C.A GEPECABelum ada peringkat
- EA448Dokumen9 halamanEA448Orlando Velado100% (1)
- MPZ Motorized PotentiometerDokumen6 halamanMPZ Motorized PotentiometerSantosh Das100% (2)
- SEO-optimized title for technical document on regulatorDokumen54 halamanSEO-optimized title for technical document on regulatorIurii GlushichBelum ada peringkat
- Stamford PE-734-B Generator Data With DVRDokumen81 halamanStamford PE-734-B Generator Data With DVRSerg MarushkoBelum ada peringkat
- Pilot ExciterDokumen6 halamanPilot ExciterRudy HerreraBelum ada peringkat
- Electric Power Generation and Excitation SystemDokumen20 halamanElectric Power Generation and Excitation SystemMansen NsubugaBelum ada peringkat
- Automatic Voltage Regulator in GensetDokumen8 halamanAutomatic Voltage Regulator in GensetPravat Kumar BeheraBelum ada peringkat
- ExcitationRDokumen4 halamanExcitationRDan GrayBelum ada peringkat
- ExcitationDokumen4 halamanExcitationDan GrayBelum ada peringkat
- Presentation On DVR, JS Saroya, CS Singh, 03.12.11Dokumen75 halamanPresentation On DVR, JS Saroya, CS Singh, 03.12.11Amit BiswasBelum ada peringkat
- Reading Wiring Diagram FH 4Dokumen1 halamanReading Wiring Diagram FH 4ariwibowoBelum ada peringkat
- Using CTs with DSE ProductsDokumen2 halamanUsing CTs with DSE ProductsJoaquin Chavez ArquiñigoBelum ada peringkat
- Brake Diagram FMDokumen5 halamanBrake Diagram FMariwibowoBelum ada peringkat
- Reading Wiring Diagram FH 4Dokumen1 halamanReading Wiring Diagram FH 4ariwibowoBelum ada peringkat
- Air ConnectionDokumen2 halamanAir ConnectionariwibowoBelum ada peringkat
- GJFDHGJHDokumen1 halamanGJFDHGJHariwibowoBelum ada peringkat
- NonoooDokumen5 halamanNonoooariwibowo100% (1)
- FD50 7 PDFDokumen12 halamanFD50 7 PDFariwibowo0% (2)
- V Stay DescriptionDokumen3 halamanV Stay DescriptionariwibowoBelum ada peringkat
- GJFDHGJHDokumen1 halamanGJFDHGJHariwibowoBelum ada peringkat
- AC PowerDokumen6 halamanAC PowerariwibowoBelum ada peringkat
- EBR-VEB+ Eng 08 2110357Dokumen2 halamanEBR-VEB+ Eng 08 2110357ariwibowoBelum ada peringkat
- Air Drier Cassette, Replace PDFDokumen3 halamanAir Drier Cassette, Replace PDFariwibowoBelum ada peringkat
- HOOJKJKJKDokumen7 halamanHOOJKJKJKariwibowoBelum ada peringkat
- Cat Electronic Technician 2015A v1.0 Status 20/ 10/ 2016 13:52Dokumen2 halamanCat Electronic Technician 2015A v1.0 Status 20/ 10/ 2016 13:52ariwibowoBelum ada peringkat
- Cat Electronic Technician 2015A v1.0 Status 20/ 10/ 2016 13:52Dokumen2 halamanCat Electronic Technician 2015A v1.0 Status 20/ 10/ 2016 13:52ariwibowoBelum ada peringkat
- SEBD0640 OIL and Your EngineDokumen50 halamanSEBD0640 OIL and Your EngineariwibowoBelum ada peringkat
- kVA, kW, KVAr and Power Factor ExplainedDokumen2 halamankVA, kW, KVAr and Power Factor ExplainedGabriel OrellanBelum ada peringkat
- Volvo Trucks Driving Progress with the FH 16 6x4 TractorDokumen7 halamanVolvo Trucks Driving Progress with the FH 16 6x4 TractorariwibowoBelum ada peringkat
- Fm64r1hb GBR EngDokumen7 halamanFm64r1hb GBR EngariwibowoBelum ada peringkat
- CAIM 1000 Tech DescriptionDokumen46 halamanCAIM 1000 Tech DescriptionRahmat Nur IlhamBelum ada peringkat
- GHGHGDokumen2 halamanGHGHGariwibowoBelum ada peringkat
- BBM, Diagnostic Trouble CodesDokumen3 halamanBBM, Diagnostic Trouble CodessengottaiyanBelum ada peringkat
- Fh64t6hb GBR EngDokumen7 halamanFh64t6hb GBR EngariwibowoBelum ada peringkat
- EMP Service Information Flowchart: YES NODokumen1 halamanEMP Service Information Flowchart: YES NOariwibowoBelum ada peringkat
- Volvo FM9Dokumen4 halamanVolvo FM9ariwibowo0% (1)
- JooDokumen1 halamanJooariwibowoBelum ada peringkat
- RowDokumen1 halamanRowariwibowoBelum ada peringkat
- RowDokumen1 halamanRowariwibowoBelum ada peringkat
- Cross Valve Directional ControlDokumen36 halamanCross Valve Directional ControlariwibowoBelum ada peringkat
- 320W Single Output With PFC Function: SeriesDokumen4 halaman320W Single Output With PFC Function: SeriesJesus HolmesBelum ada peringkat
- Complete Engineering Review & Training Center: Weekly Exam 6Dokumen1 halamanComplete Engineering Review & Training Center: Weekly Exam 6Hary KrizBelum ada peringkat
- Unit 5Dokumen26 halamanUnit 5Dr C.R. BalamuruganBelum ada peringkat
- DV DT Limitation of SCR S PDFDokumen1 halamanDV DT Limitation of SCR S PDFaswardiBelum ada peringkat
- SMS66GI01IDokumen3 halamanSMS66GI01INaveen LalBelum ada peringkat
- Ejercicios Factores Energéticos ElectrotecniaDokumen10 halamanEjercicios Factores Energéticos ElectrotecniaAlejoGonzalezBelum ada peringkat
- X-Ray Tube Assembly & Installation ManualDokumen72 halamanX-Ray Tube Assembly & Installation ManualĐăng Lê Hồ NguyênBelum ada peringkat
- Implementation of Multi Level Inverter For SEPIC Converter With Grid Connected PV SystemDokumen9 halamanImplementation of Multi Level Inverter For SEPIC Converter With Grid Connected PV SystemAl MahdaliBelum ada peringkat
- Basic Types of FACTS ControllersDokumen13 halamanBasic Types of FACTS ControllersNarendra VermaBelum ada peringkat
- KA78L05AZDokumen16 halamanKA78L05AZoscarcorradBelum ada peringkat
- General Notes and Specifications A Legends and Symbols BDokumen1 halamanGeneral Notes and Specifications A Legends and Symbols BRonan RojasBelum ada peringkat
- PDF Transformer Power StationDokumen47 halamanPDF Transformer Power Stationvolt100% (10)
- Electrical Design-StepsDokumen13 halamanElectrical Design-Stepsnadeem UddinBelum ada peringkat
- OPMS Trip Report AnalysisDokumen4 halamanOPMS Trip Report AnalysisAnuragBelum ada peringkat
- 38th Epira Report April-2021Dokumen108 halaman38th Epira Report April-2021Karen Jella EscobinBelum ada peringkat
- Branch Panel: SMDB-02 Branch Panel: SMDB-01: Reference DrawingsDokumen1 halamanBranch Panel: SMDB-02 Branch Panel: SMDB-01: Reference DrawingsAnonymous 7z6OzoBelum ada peringkat
- M500M Manual I56-3855Dokumen2 halamanM500M Manual I56-3855Projects aissolBelum ada peringkat
- Water 1122Dokumen27 halamanWater 1122Sajid AliBelum ada peringkat
- AI Based Controller For Three Phase Three Level, Soft Switched, Phase Shift PWM DC To DC Converter For High Power ApplicationDokumen7 halamanAI Based Controller For Three Phase Three Level, Soft Switched, Phase Shift PWM DC To DC Converter For High Power ApplicationJyothiPunemBelum ada peringkat
- Manual Instalación PBO 85 PDFDokumen26 halamanManual Instalación PBO 85 PDFWilson ValladaresBelum ada peringkat
- Synchronous Motor Drives - LCIDokumen15 halamanSynchronous Motor Drives - LCIJoyson PereiraBelum ada peringkat
- HFW-50 T5: Industrial Range Open SkidDokumen6 halamanHFW-50 T5: Industrial Range Open SkidNguyen Vu Hoang ThachBelum ada peringkat
- Wheel Electronic: Doepfer Musikelektronik GMBHDokumen16 halamanWheel Electronic: Doepfer Musikelektronik GMBHBlenggoBelum ada peringkat
- Voltage Drop CalculationDokumen3 halamanVoltage Drop CalculationErdincBelum ada peringkat
- Description: Beijing Estek Electronics Co.,LtdDokumen3 halamanDescription: Beijing Estek Electronics Co.,LtdDiego OliveiraBelum ada peringkat
- B0505s PDFDokumen3 halamanB0505s PDFloc78vnBelum ada peringkat
- SCAA048 - Filtering TechniquesDokumen7 halamanSCAA048 - Filtering TechniquesAriana Ribeiro LameirinhasBelum ada peringkat
- PMBLDC Wind Generator ControlDokumen14 halamanPMBLDC Wind Generator ControlvinayakBelum ada peringkat
- Distribution Business Unit Cummins Field Service Report Deccan Sales and Services Private Limited (Indore)Dokumen2 halamanDistribution Business Unit Cummins Field Service Report Deccan Sales and Services Private Limited (Indore)Karthii AjuBelum ada peringkat
- DA-VPRS4175E Installation ManualDokumen18 halamanDA-VPRS4175E Installation ManualDe Dao VanBelum ada peringkat