Anda mungkin juga menyukai
- JBL+Boombox+-+Service+Manual+V1 7Dokumen49 halamanJBL+Boombox+-+Service+Manual+V1 7Gilson Pereira100% (1)
- Lenovo Yoga 700-14isk Byg43 Nm-A601 Rev 1.0 PDFDokumen46 halamanLenovo Yoga 700-14isk Byg43 Nm-A601 Rev 1.0 PDFA Meza BautiztaBelum ada peringkat
- Lenovo E470 Nm-A821 Rev.2.0Dokumen82 halamanLenovo E470 Nm-A821 Rev.2.0AlessandroBelum ada peringkat
- 7.4.3.5 Lab - Configuring Basic EIGRP For IPv6 - ILM PDFDokumen17 halaman7.4.3.5 Lab - Configuring Basic EIGRP For IPv6 - ILM PDFMaksim Korsakov97% (31)
- How CUDA Programming Works - 1647539841016001sz6eDokumen101 halamanHow CUDA Programming Works - 1647539841016001sz6esadeqbillahBelum ada peringkat
- CB Insights - Tech Trends 2024Dokumen129 halamanCB Insights - Tech Trends 2024tanase.octavian2561Belum ada peringkat
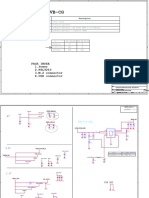
- RTL9210-VB-CG Demo V203 PDFDokumen5 halamanRTL9210-VB-CG Demo V203 PDFCenusa MihaiBelum ada peringkat
- NVSwitchDokumen23 halamanNVSwitchMF KangBelum ada peringkat
- GPU Bootcamp SamharDokumen96 halamanGPU Bootcamp SamharAman JainBelum ada peringkat
- FPGA Programming and Simulation Lab ReportDokumen6 halamanFPGA Programming and Simulation Lab ReportReeseBelum ada peringkat
- Design and Simulatio N of 4-Bit Alu Using Gdi TechniqueDokumen10 halamanDesign and Simulatio N of 4-Bit Alu Using Gdi Techniqueramya vattamwarBelum ada peringkat
- Verilog LabDokumen70 halamanVerilog Labhkes rcrBelum ada peringkat
- ccn78Dokumen23 halamanccn78kadamviraj599Belum ada peringkat
- DAE21501 Lab1Dokumen13 halamanDAE21501 Lab1Mohamad Md SomBelum ada peringkat
- Lab 1Dokumen5 halamanLab 1tttm2609Belum ada peringkat
- Lab Manual Laboratory Practice-I: (System Programming & Operating System)Dokumen35 halamanLab Manual Laboratory Practice-I: (System Programming & Operating System)prafulla100% (2)
- SDN&Agile Network - Unveil Huawei's SDN Architecture and ControllerDokumen54 halamanSDN&Agile Network - Unveil Huawei's SDN Architecture and ControllerkmadBelum ada peringkat
- Digital Logic Design Lab: Experiment #5 NAND / NOR Logic Circuit ImplementationDokumen9 halamanDigital Logic Design Lab: Experiment #5 NAND / NOR Logic Circuit ImplementationMohamad MonerBelum ada peringkat
- Microprocessor Interfacing and System Design QuestionDokumen4 halamanMicroprocessor Interfacing and System Design QuestionSharif Shah NewazBelum ada peringkat
- CSCI380-Week 4-Lecture 2-Gantt ChartDokumen3 halamanCSCI380-Week 4-Lecture 2-Gantt Chart12110159Belum ada peringkat
- Jura XJ9 Wiring DiagramDokumen3 halamanJura XJ9 Wiring DiagramGrom Neposeda50% (2)
- Alto_Maxidrive_3.4_Crossover_Service_ManualDokumen42 halamanAlto_Maxidrive_3.4_Crossover_Service_ManualNiX Pro AudioBelum ada peringkat
- Adafruit 16 X 32 LEDMatrix Guide For BBBDokumen6 halamanAdafruit 16 X 32 LEDMatrix Guide For BBBDiego FernandezBelum ada peringkat
- JPEG DECODER USING VHDL AND IMPLEMENTING IT ON FPGA SPARTAN 3A KItProject Main Report1Dokumen21 halamanJPEG DECODER USING VHDL AND IMPLEMENTING IT ON FPGA SPARTAN 3A KItProject Main Report1Sachin RathodBelum ada peringkat
- 7.3.2.6 Packet Tracer - Pinging and Tracing To Test The PathDokumen5 halaman7.3.2.6 Packet Tracer - Pinging and Tracing To Test The PathtopherskiBelum ada peringkat
- ABB I-Bus® KNX: SA/S 8.16.6.2 Switch ActuatorDokumen9 halamanABB I-Bus® KNX: SA/S 8.16.6.2 Switch ActuatorJulián HernándezBelum ada peringkat
- NESO Artix 7 FPGA Development Board: User GuideDokumen34 halamanNESO Artix 7 FPGA Development Board: User GuideSai BabaBelum ada peringkat
- Using Fpgas and Cplds Along With Embedded Microcontrollers Elp 305: Design and System LaboratoryDokumen6 halamanUsing Fpgas and Cplds Along With Embedded Microcontrollers Elp 305: Design and System LaboratorySamarthBelum ada peringkat
- Lab Manual lp1Dokumen41 halamanLab Manual lp1PATIL NIKHILBelum ada peringkat
- Servo Analog +5V: PDF Created With Pdffactory Pro Trial VersionDokumen7 halamanServo Analog +5V: PDF Created With Pdffactory Pro Trial VersionElker Brindeiro de OliveiraBelum ada peringkat
- EECS 489: Final Exam, Fall 2018: Duration: 70 MinutesDokumen7 halamanEECS 489: Final Exam, Fall 2018: Duration: 70 MinutesTayyaba AsifBelum ada peringkat
- vOQ NCSDokumen123 halamanvOQ NCSAlisamiirBelum ada peringkat
- 6.SS - AssignmentDokumen3 halaman6.SS - AssignmentMeshwa AcharyaBelum ada peringkat
- 5502icbtae - Mpae WeDokumen5 halaman5502icbtae - Mpae WeKamal SurenBelum ada peringkat
- PCA10040 Schematic and PCB PDFDokumen12 halamanPCA10040 Schematic and PCB PDFtestBelum ada peringkat
- Microcontroller Based Weighing MachineDokumen7 halamanMicrocontroller Based Weighing MachineNaveen NaniBelum ada peringkat
- COM.0 Type 6 Evaluation Baseboard: Rev. C.0Dokumen25 halamanCOM.0 Type 6 Evaluation Baseboard: Rev. C.0Khoa DangBelum ada peringkat
- Efabless Caravel PicoRV32 SoC OverviewDokumen30 halamanEfabless Caravel PicoRV32 SoC OverviewLe HuyBelum ada peringkat
- 7.3.2.6 Packet Tracer - Pinging and Tracing To Test The Path - ITExamAnswersDokumen5 halaman7.3.2.6 Packet Tracer - Pinging and Tracing To Test The Path - ITExamAnswersdestiBelum ada peringkat
- 4-Bit Ripple Carry Adder Lab ReportDokumen8 halaman4-Bit Ripple Carry Adder Lab ReportMUHAMMAD ARSLANBelum ada peringkat
- DatasheetDokumen8 halamanDatasheetReinaldo Antonio CortezBelum ada peringkat
- NIE&T Greater Noida Python Course DetailsDokumen73 halamanNIE&T Greater Noida Python Course DetailsRupesh kumarBelum ada peringkat
- LAB 3: I/O I - 7-S D: Nterfacing EG IsplaysDokumen4 halamanLAB 3: I/O I - 7-S D: Nterfacing EG IsplaysAhmed SajidBelum ada peringkat
- Updated - DSDV - BEC302 - LAB MANUAL123Dokumen54 halamanUpdated - DSDV - BEC302 - LAB MANUAL123Harish G CBelum ada peringkat
- 2023046644 (3)Dokumen5 halaman2023046644 (3)Mr GBelum ada peringkat
- PCA10040 Schematic and PCBDokumen12 halamanPCA10040 Schematic and PCBcalltokamalBelum ada peringkat
- LAB 3 - Verilog For Combinatorial Circuits: GoalsDokumen7 halamanLAB 3 - Verilog For Combinatorial Circuits: GoalsJoey WangBelum ada peringkat
- HDL Manual 2019 5th Sem E&CE 17ECL58Dokumen77 halamanHDL Manual 2019 5th Sem E&CE 17ECL58vishvakirana100% (1)
- OrcadDokumen20 halamanOrcadfornetuse16Belum ada peringkat
- Schematic Zeroboard UnoDokumen1 halamanSchematic Zeroboard UnoKutu BusuxBelum ada peringkat
- Primecore 20100222Dokumen23 halamanPrimecore 20100222Thu TrangBelum ada peringkat
- rh-19 Schematic 1 0Dokumen9 halamanrh-19 Schematic 1 0phlimsyboy100% (1)
- Project Name: I4XIXX Platform: Montevina Merom (CPU) +cantiga (NB) +ICH9M (SB)Dokumen37 halamanProject Name: I4XIXX Platform: Montevina Merom (CPU) +cantiga (NB) +ICH9M (SB)sousalrBelum ada peringkat
- J750 C450Dokumen1 halamanJ750 C450fermetalBelum ada peringkat
- Datasheet: 4D Universal Programming AdaptorDokumen10 halamanDatasheet: 4D Universal Programming Adaptorolivier CHOUILLOUBelum ada peringkat
- Week 2Dokumen4 halamanWeek 2Nam NguyenBelum ada peringkat
- KK Programmer ReplacementDokumen12 halamanKK Programmer ReplacementshaneBelum ada peringkat
- Module OrcadDokumen44 halamanModule OrcadJia Kai LowBelum ada peringkat
- PC Final Eng 2020 2021Dokumen9 halamanPC Final Eng 2020 2021Mohamad AlwanBelum ada peringkat
- EN6000 - Project - Oct - 2022 - NewDokumen24 halamanEN6000 - Project - Oct - 2022 - News.mahadrBelum ada peringkat
- JNCIE SP v1.1 Technology Focused Workbook 2018Dokumen28 halamanJNCIE SP v1.1 Technology Focused Workbook 2018Abhishek gargBelum ada peringkat
- Interface Board 1V1Dokumen8 halamanInterface Board 1V1Alejandro CaceresBelum ada peringkat
- Design Low Noise Amplifier for ISM BandDokumen4 halamanDesign Low Noise Amplifier for ISM BandG0tBlackOpsBelum ada peringkat
- LEARN MPLS FROM SCRATCH PART-A: A Beginner's Guide to Next Level of NetworkingDari EverandLEARN MPLS FROM SCRATCH PART-A: A Beginner's Guide to Next Level of NetworkingBelum ada peringkat
- POWER9 Announcements John Bizon 20180306Dokumen104 halamanPOWER9 Announcements John Bizon 20180306tri yantoBelum ada peringkat
- Nvidia Dgx-1: The Essential Instrument For Ai ResearchDokumen2 halamanNvidia Dgx-1: The Essential Instrument For Ai Researchblackslash82Belum ada peringkat
- Nvidia A100 80Gb Pcie Gpu: Product BriefDokumen20 halamanNvidia A100 80Gb Pcie Gpu: Product Brieftt cheneyBelum ada peringkat
- Brochure AplusDokumen36 halamanBrochure AplusTsuroerusuBelum ada peringkat
- Gpu VirtualisationDokumen14 halamanGpu Virtualisationkumar53366Belum ada peringkat
- Nvidia Magnum Io Gpudirect Storage Overview Guide: 1.1. Related DocumentsDokumen22 halamanNvidia Magnum Io Gpudirect Storage Overview Guide: 1.1. Related DocumentsNan_KingyjBelum ada peringkat
- Nvidia A100 Datasheet Us Nvidia 1758950 r4 WebDokumen3 halamanNvidia A100 Datasheet Us Nvidia 1758950 r4 WebAlejandro KisielBelum ada peringkat
- OCI Webinar ASEDokumen69 halamanOCI Webinar ASEjohnye22Belum ada peringkat
- NVIDIA Ampere GPU Architecture Tuning Guide - Ampere Tuning Guide 12.3 DocumentationDokumen5 halamanNVIDIA Ampere GPU Architecture Tuning Guide - Ampere Tuning Guide 12.3 DocumentationHung NguyenBelum ada peringkat
- Interim Report On BenchmarkingDokumen37 halamanInterim Report On BenchmarkingGary Ryan DonovanBelum ada peringkat
- Dell Server HCI Midrange DataProtection Update 27th Sept 2023Dokumen87 halamanDell Server HCI Midrange DataProtection Update 27th Sept 2023Trương ĐứcBelum ada peringkat
- CuptiDokumen117 halamanCupti370994944Belum ada peringkat
- AC922 FAQ: Questions and AnswersDokumen5 halamanAC922 FAQ: Questions and AnswersChristian ZambranaBelum ada peringkat
- Proviz Print Nvidia RTX A6000 Datasheet Us Nvidia 1454980 r9 WebDokumen2 halamanProviz Print Nvidia RTX A6000 Datasheet Us Nvidia 1454980 r9 WebGianni TaccioliBelum ada peringkat
- NVIDIA Data Center Roadmap With GX200NVL GX200 X100 and X40 AI Chips in 2025 - ServeTheHomeDokumen1 halamanNVIDIA Data Center Roadmap With GX200NVL GX200 X100 and X40 AI Chips in 2025 - ServeTheHomejm.dominBelum ada peringkat
- gtc22 Whitepaper HopperDokumen71 halamangtc22 Whitepaper HopperHengrui ZhangBelum ada peringkat
- Grid Vgpu Release Notes Red Hat El KVMDokumen41 halamanGrid Vgpu Release Notes Red Hat El KVMRainaBelum ada peringkat
- Release NotesDokumen32 halamanRelease NotessnidosBelum ada peringkat
- DGX A100 System Architecture WhitepaperDokumen23 halamanDGX A100 System Architecture WhitepaperleminhbkBelum ada peringkat
- The Fastest PC Gpu For Developer Workflows: Nvidia Titan RTXDokumen1 halamanThe Fastest PC Gpu For Developer Workflows: Nvidia Titan RTXAlvaro CalandraBelum ada peringkat
- CST Studio Suite 2019: GPU Computing GuideDokumen33 halamanCST Studio Suite 2019: GPU Computing GuideDaniiella RochiiBelum ada peringkat
- Nvidia Tesla p100 DatasheetDokumen2 halamanNvidia Tesla p100 DatasheetNetflix ChillBelum ada peringkat
- AI Infrastructure Reference Architecture: IBM SystemsDokumen28 halamanAI Infrastructure Reference Architecture: IBM SystemsBisyron WahyudiBelum ada peringkat
- Nvidia DGX Station Datasheet PDFDokumen2 halamanNvidia DGX Station Datasheet PDFTypeONegativeBelum ada peringkat
- OCI AI PortafolioDokumen8 halamanOCI AI Portafolioxash2Belum ada peringkat
- Geforce RTX 2080 Super User GuideDokumen29 halamanGeforce RTX 2080 Super User GuideMaher Al AbbasiBelum ada peringkat