Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Relationships, 365 Day Devotional Mylesunroe 377pgDokumen377 halamanRelationships, 365 Day Devotional Mylesunroe 377pgEla100% (7)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Banachek UnlimitedDokumen34 halamanBanachek UnlimitedserenaBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Basic Pneumatic ControlsDokumen45 halamanBasic Pneumatic ControlsMartin BourgonBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- BTK Implant Guide SurgeryDokumen48 halamanBTK Implant Guide SurgeryMaria VolvinaBelum ada peringkat
- Aluminium Alloy - Wikipedia, The Free EncyclopediaDokumen12 halamanAluminium Alloy - Wikipedia, The Free EncyclopediaAshishJoshi100% (1)
- Listening - Homework 2: Brushes 285 RamdhanieDokumen4 halamanListening - Homework 2: Brushes 285 RamdhanieBao Tran NguyenBelum ada peringkat
- All About PlantsDokumen14 halamanAll About Plantsapi-234860390Belum ada peringkat
- Sample Scope Statement (191933)Dokumen1 halamanSample Scope Statement (191933)Mohamad Mahmoud TahaBelum ada peringkat
- Eledyne Astings Nstruments: Flow Calibration PlanDokumen1 halamanEledyne Astings Nstruments: Flow Calibration PlanMohamad Mahmoud TahaBelum ada peringkat
- Rate ThroughputDokumen35 halamanRate ThroughputNgô Anh TuấnBelum ada peringkat
- Pneumatic Basic PrinciplesDokumen6 halamanPneumatic Basic PrinciplesAqua SovBelum ada peringkat
- Modern Digital and Analog Communications Systems - B.P. LathDokumen155 halamanModern Digital and Analog Communications Systems - B.P. LathManoj KhiranBelum ada peringkat
- PrefDokumen5 halamanPrefJorge L CalizayaBelum ada peringkat
- Math 202 Syllabus-Spring18 PDFDokumen2 halamanMath 202 Syllabus-Spring18 PDFvonacoc49Belum ada peringkat
- Firestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsDokumen77 halamanFirestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsRed JohnBelum ada peringkat
- Rido, Rudini - Paediatric ECGDokumen51 halamanRido, Rudini - Paediatric ECGFikriYTBelum ada peringkat
- Industrial Internet of Things: Presented To-Presented byDokumen18 halamanIndustrial Internet of Things: Presented To-Presented byGaurav RaturiBelum ada peringkat
- Accuity: High Speed Automated 2D & 3D Optical Gauging Single Click Setup and InspectionDokumen4 halamanAccuity: High Speed Automated 2D & 3D Optical Gauging Single Click Setup and InspectionAPPLEBelum ada peringkat
- ELIDA Products CatalogueDokumen37 halamanELIDA Products CatalogueAbhishek AgarwalBelum ada peringkat
- Mullā Ṣadrā and Causation - Rethinking A Problem in Later Islamic Philosophy AuthorDokumen15 halamanMullā Ṣadrā and Causation - Rethinking A Problem in Later Islamic Philosophy AuthorKadag LhundrupBelum ada peringkat
- Statistics and Probability Module 3Dokumen3 halamanStatistics and Probability Module 3Eftychia LeegleeBelum ada peringkat
- BS746 2014Dokumen22 halamanBS746 2014marco SimonelliBelum ada peringkat
- Exercise 9 Two Factor Factorial Experiments and Derivation of Expected Mean SquaresDokumen14 halamanExercise 9 Two Factor Factorial Experiments and Derivation of Expected Mean SquaresHasmaye PintoBelum ada peringkat
- Cell Structure, Function Practice Test With AnswersDokumen16 halamanCell Structure, Function Practice Test With AnswersDJ ISAACSBelum ada peringkat
- Armor MagazineDokumen32 halamanArmor Magazine"Rufus"100% (1)
- Earth Science (Metamorphic Rocks)Dokumen8 halamanEarth Science (Metamorphic Rocks)MA. ALEXIS LAURENBelum ada peringkat
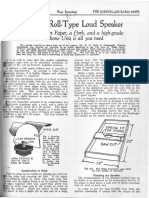
- Simple Roll-Type: A Loud SpeakerDokumen1 halamanSimple Roll-Type: A Loud SpeakerEudes SilvaBelum ada peringkat
- Sheet Metal Manufacturing Companies NoidaDokumen9 halamanSheet Metal Manufacturing Companies NoidaAmanda HoldenBelum ada peringkat
- Chemistry Notes: SUBJECT: Leaving Cert Chemistry Level: TEACHER: Tara LyonsDokumen5 halamanChemistry Notes: SUBJECT: Leaving Cert Chemistry Level: TEACHER: Tara LyonsSevinc NuriyevaBelum ada peringkat
- TS SR Chemistry Imp Questions PDFDokumen5 halamanTS SR Chemistry Imp Questions PDFUnknown Khan100% (3)
- Opex and CapexDokumen5 halamanOpex and CapexATM Shafiq Ul AlamBelum ada peringkat
- Contact Inform 2002 PDFDokumen24 halamanContact Inform 2002 PDFFrank AlmeidaBelum ada peringkat
- LPG GasDokumen39 halamanLPG Gasv prasanthBelum ada peringkat
- SPM 1449 2006 Mathematics p2 BerjawapanDokumen18 halamanSPM 1449 2006 Mathematics p2 Berjawapanpss smk selandar71% (7)
- Physics 101Dokumen21 halamanPhysics 101Kuna KunavathiBelum ada peringkat