Anda mungkin juga menyukai
- Fundamentos de programación: un enfoque prácticoDari EverandFundamentos de programación: un enfoque prácticoPenilaian: 5 dari 5 bintang5/5 (1)
- Programación de RobotsDokumen3 halamanProgramación de RobotsYazareth EstefanaBelum ada peringkat
- Fase 4 - Grupo - 299011 - 2Dokumen10 halamanFase 4 - Grupo - 299011 - 2Randy BarrancoBelum ada peringkat
- Lenguajes de Progración de RobotsDokumen14 halamanLenguajes de Progración de RobotsEdgar Antonio Rocha SolísBelum ada peringkat
- Programación de RobotsDokumen11 halamanProgramación de RobotsAnonymous KxLM7LFreBelum ada peringkat
- Programación de RobotsDokumen4 halamanProgramación de RobotsJean Carlos Manzanillo CorderoBelum ada peringkat
- UNIDADESDokumen6 halamanUNIDADESEduardo GonzalezBelum ada peringkat
- R1U2OR Respuestas 1Dokumen2 halamanR1U2OR Respuestas 1Salem Rivera RodríguezBelum ada peringkat
- 1 Programación de RobotsDokumen29 halaman1 Programación de RobotsMoraditoBelum ada peringkat
- Robótics ProgrammingDokumen9 halamanRobótics ProgrammingGuillermo MoranBelum ada peringkat
- Programacion de Robots y LenguajesDokumen21 halamanProgramacion de Robots y LenguajesurielhdzBelum ada peringkat
- Lenguajes de Programacion en La RoboticaDokumen19 halamanLenguajes de Programacion en La RoboticaJoisy RojasBelum ada peringkat
- PDF 20230419 202503 0000Dokumen14 halamanPDF 20230419 202503 0000David LopezBelum ada peringkat
- Clasificación de La Programación Usada en RobóticaDokumen5 halamanClasificación de La Programación Usada en RobóticaVictor MoralesBelum ada peringkat
- Programacion de Robot de Coordenadas CartesianasDokumen9 halamanProgramacion de Robot de Coordenadas CartesianasIvan LopezBelum ada peringkat
- Programacion de Robots-Jose OvallesDokumen7 halamanProgramacion de Robots-Jose OvallesJ_OvallesBelum ada peringkat
- T7 DHDJDokumen7 halamanT7 DHDJkevinisaacarellanovidaurryipnBelum ada peringkat
- Respuestas Rou2ni9f1aDokumen2 halamanRespuestas Rou2ni9f1aJose Ramon Salgado BetanzosBelum ada peringkat
- Metodos de Programacion de RobotsDokumen20 halamanMetodos de Programacion de RobotsDavid Shure XivBelum ada peringkat
- 13-18 U2Dokumen6 halaman13-18 U2Carlos GodinezBelum ada peringkat
- UntitledDokumen1 halamanUntitledjose reyesBelum ada peringkat
- Guía Células de ManufacturaDokumen8 halamanGuía Células de ManufacturaAlberto RamirezBelum ada peringkat
- Lenguajes de ProgramacionDokumen18 halamanLenguajes de Programacioncrisanty766678367Belum ada peringkat
- Fase 4 Jorge GarciaDokumen9 halamanFase 4 Jorge Garciasindy Bermúdez CaballeroBelum ada peringkat
- Unidad 2Dokumen24 halamanUnidad 2JanethBelum ada peringkat
- Practica 5Dokumen33 halamanPractica 5sistemaelectricoBelum ada peringkat
- Programacion de Los RobotDokumen9 halamanProgramacion de Los RobotSEBASTIAN HUMBERTO RIVAS CIFUENTESBelum ada peringkat
- TraBajo CAPITULO 7 ROBOTICADokumen9 halamanTraBajo CAPITULO 7 ROBOTICAAlan LunaBelum ada peringkat
- Ri Ud3 Ud4Dokumen199 halamanRi Ud3 Ud4Borja meiriño lagoBelum ada peringkat
- Ciencias de La ComputaciónDokumen14 halamanCiencias de La ComputaciónDayrelis FloresBelum ada peringkat
- 3 Aplicaciones para Programar en La Robótica. Sem 4 Enc 1Dokumen14 halaman3 Aplicaciones para Programar en La Robótica. Sem 4 Enc 1Dayrelis FloresBelum ada peringkat
- ProgramacionDokumen12 halamanProgramacionJohn GavilanezBelum ada peringkat
- Unidad 2 ORDINARIO Respuestas 9F1ADokumen2 halamanUnidad 2 ORDINARIO Respuestas 9F1AJose Ramon Salgado BetanzosBelum ada peringkat
- Aporte Jean DickDokumen5 halamanAporte Jean DickDairo ortegaBelum ada peringkat
- ACORDEONDokumen2 halamanACORDEONMoraditoBelum ada peringkat
- Como Se Programa Un RobotDokumen3 halamanComo Se Programa Un RobotMissael VegaBelum ada peringkat
- Tarea de Computación Qué Es La ProgramaciónDokumen1 halamanTarea de Computación Qué Es La ProgramaciónIsis Nickthé Betanzos CruzBelum ada peringkat
- Resumen Unidad 3Dokumen5 halamanResumen Unidad 3Gabriela LlerenaBelum ada peringkat
- Lenguajes de Programacion de Un RobotDokumen6 halamanLenguajes de Programacion de Un RobotGabriel OrtizBelum ada peringkat
- Unidad 1 Saber 1PROGRAMACION DE ROBOTSDokumen17 halamanUnidad 1 Saber 1PROGRAMACION DE ROBOTSLUIS HUMBERTO DEL PRADO AGUIRREBelum ada peringkat
- Ac - 14 Programación Textual 1Dokumen16 halamanAc - 14 Programación Textual 1edgarBelum ada peringkat
- 5 Estructuras de Control Parte I (Secuenciación)Dokumen19 halaman5 Estructuras de Control Parte I (Secuenciación)Dayrelis FloresBelum ada peringkat
- Clase 21Dokumen33 halamanClase 21Fernando Cardenas GomezBelum ada peringkat
- Caracteristicas Basicas de Los Lenguajes RAPID y V+Dokumen8 halamanCaracteristicas Basicas de Los Lenguajes RAPID y V+Dave BoBelum ada peringkat
- Programacion de RobotsDokumen43 halamanProgramacion de RobotsOMEGA LUL KAPPABelum ada peringkat
- Foro Tematico Robotica IndustrialDokumen4 halamanForo Tematico Robotica IndustrialCARLOS FFBelum ada peringkat
- LOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturaDokumen5 halamanLOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturasalomon ambrosioBelum ada peringkat
- Actividad 5Dokumen2 halamanActividad 5carlos omar rebollar ortizBelum ada peringkat
- Estructura Programacion RapidDokumen1 halamanEstructura Programacion RapidAlfonso Herrera MartinBelum ada peringkat
- Principios de Programacion RoboticaDokumen7 halamanPrincipios de Programacion RoboticaMariano Ënriquë Dë JësusBelum ada peringkat
- Textual Explicita y EspecificativaDokumen4 halamanTextual Explicita y EspecificativaPerez Sanchez Miriam JaredBelum ada peringkat
- Ensayo ProgramaciónDokumen4 halamanEnsayo ProgramaciónYoimelRojasStowsBelum ada peringkat
- Guia de Estudio Bloque 2Dokumen7 halamanGuia de Estudio Bloque 2joe sebastian ortiz trujequeBelum ada peringkat
- Robotica Fase 4Dokumen38 halamanRobotica Fase 4alexis pedroza100% (3)
- Robotica Fase 4Dokumen38 halamanRobotica Fase 4Yuli MarinBelum ada peringkat
- Programación de RobotsDokumen43 halamanProgramación de RobotsEduardo Jose HerreraBelum ada peringkat
- BancoDokumen2 halamanBancoSkySalvatoreBelum ada peringkat
- Actividad Sumativa 3Dokumen3 halamanActividad Sumativa 3Azul GonzálezBelum ada peringkat
- Tema IvDokumen6 halamanTema IvDeyimel acostaBelum ada peringkat
- Hackear Wifi WEP Wifiway 2.0.X y 3Dokumen7 halamanHackear Wifi WEP Wifiway 2.0.X y 3Alejandro Aguilar CáceresBelum ada peringkat
- Ejemplo de MonografiaDokumen7 halamanEjemplo de MonografiaRick JaimesBelum ada peringkat
- Proyecto de Higiene y Seguridad IDokumen5 halamanProyecto de Higiene y Seguridad IghalahBelum ada peringkat
- 08-Simbologia QuimicaDokumen1 halaman08-Simbologia QuimicaCristhian HZBelum ada peringkat
- TTRR - Segunda Etapa de Sistema de Bombeo SE CHIMBOTEDokumen9 halamanTTRR - Segunda Etapa de Sistema de Bombeo SE CHIMBOTECesar Perez TineoBelum ada peringkat
- Ensayo Apple vs. Microsoft, Historia de TitanesDokumen4 halamanEnsayo Apple vs. Microsoft, Historia de TitanesFrida BurgosBelum ada peringkat
- 8 Calculo de La Chimenea PDFDokumen8 halaman8 Calculo de La Chimenea PDFJocelyn Gonzalez ReyesBelum ada peringkat
- Analisis de Arena para FundiciónDokumen9 halamanAnalisis de Arena para FundiciónMiguel Fernandez CamonesBelum ada peringkat
- Laboratorio 1 - Automata Programable Plc-2019-2Dokumen1 halamanLaboratorio 1 - Automata Programable Plc-2019-2anthony zegarra ochoaBelum ada peringkat
- Problemas EquilibrioDokumen4 halamanProblemas EquilibriotioguillyBelum ada peringkat
- IPERC-EXP-34 Aumento - Sacado de Tubería Columna de Perforación Con Sistema Rod Handler A Caballete V00Dokumen13 halamanIPERC-EXP-34 Aumento - Sacado de Tubería Columna de Perforación Con Sistema Rod Handler A Caballete V00Ana MariaBelum ada peringkat
- James StirlingDokumen20 halamanJames StirlingVanya Maythe Vargas NavarroBelum ada peringkat
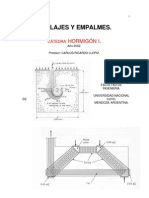
- Anclajes y EmpalmesDokumen26 halamanAnclajes y EmpalmesramilianBelum ada peringkat
- Actividades ComplementariasDokumen2 halamanActividades Complementariasanderagui12Belum ada peringkat
- Trabajo Grupal Velocidades MecanismosDokumen5 halamanTrabajo Grupal Velocidades MecanismosJeshica MoyonBelum ada peringkat
- Metodo RAVEOR Diseño de Un ServicioDokumen9 halamanMetodo RAVEOR Diseño de Un ServicioRobb L Montes RBelum ada peringkat
- Programa Algoritmia PDFDokumen3 halamanPrograma Algoritmia PDFLUIS CAMILO INGUILÁN RODRÍGUEZBelum ada peringkat
- Practica 8 CPDokumen3 halamanPractica 8 CPEdder GaiborBelum ada peringkat
- Defectos en La Produccion de Bolas de Acero para MolinosDokumen13 halamanDefectos en La Produccion de Bolas de Acero para MolinosCristian CariBelum ada peringkat
- Prueba 4 Alto Voltaje PDFDokumen8 halamanPrueba 4 Alto Voltaje PDFDavidCaloBelum ada peringkat
- Metabolismo Del AguaDokumen1 halamanMetabolismo Del AguaBenjamin Misael Rivera DiazBelum ada peringkat
- Conversion de Motores A GNVDokumen99 halamanConversion de Motores A GNVrafaelBelum ada peringkat
- Fs-Dietanolamida de CocoDokumen8 halamanFs-Dietanolamida de CocoRidberth Ramirez VerasteguiBelum ada peringkat
- Segundo Taller de CeramicaDokumen2 halamanSegundo Taller de CeramicaCARLOS ALBERTO SUAREZ PINEDABelum ada peringkat
- Perdidas de Calor en Un Secador de Bandejas PDFDokumen36 halamanPerdidas de Calor en Un Secador de Bandejas PDFPaoiittaaSteffyBelum ada peringkat
- Instructivo de Trabajo Seguro para Supervisores de CampoDokumen2 halamanInstructivo de Trabajo Seguro para Supervisores de CampoYenifer Vilcapoma RicceBelum ada peringkat
- Pre Informe 2Dokumen8 halamanPre Informe 2Samuel AruquipaBelum ada peringkat
- Manual Word Avanzado 2007Dokumen53 halamanManual Word Avanzado 2007chelispamemiBelum ada peringkat
- 5° Matriz Desempeños PrecisadosDokumen18 halaman5° Matriz Desempeños PrecisadosJesus Bernaldo Ramos100% (1)
- Drenaje Pluvial de JLODokumen46 halamanDrenaje Pluvial de JLOanon_367472992100% (1)
- Resetea tu mente. Descubre de lo que eres capazDari EverandResetea tu mente. Descubre de lo que eres capazPenilaian: 5 dari 5 bintang5/5 (196)
- Psicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaDari EverandPsicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaPenilaian: 4.5 dari 5 bintang4.5/5 (766)
- Recupera tu mente, reconquista tu vidaDari EverandRecupera tu mente, reconquista tu vidaPenilaian: 5 dari 5 bintang5/5 (8)
- Resumen de Pensar rápido pensar despacio de Daniel KahnemanDari EverandResumen de Pensar rápido pensar despacio de Daniel KahnemanPenilaian: 4.5 dari 5 bintang4.5/5 (64)
- Influencia. La psicología de la persuasiónDari EverandInfluencia. La psicología de la persuasiónPenilaian: 4.5 dari 5 bintang4.5/5 (14)
- Yo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)Dari EverandYo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)Penilaian: 5 dari 5 bintang5/5 (7)
- Una mente en calma: Técnicas para manejar los pensamientos intrusivosDari EverandUna mente en calma: Técnicas para manejar los pensamientos intrusivosPenilaian: 4.5 dari 5 bintang4.5/5 (142)
- El poder del optimismo: Herramientas para vivir de forma más positivaDari EverandEl poder del optimismo: Herramientas para vivir de forma más positivaPenilaian: 5 dari 5 bintang5/5 (16)
- Cómo terminar lo que empiezas: El arte de perseverar, pasar a la acción, ejecutar los planes y tener disciplinaDari EverandCómo terminar lo que empiezas: El arte de perseverar, pasar a la acción, ejecutar los planes y tener disciplinaPenilaian: 4.5 dari 5 bintang4.5/5 (6)
- Cómo romper el ciclo de pensamientos negativosDari EverandCómo romper el ciclo de pensamientos negativosPenilaian: 4.5 dari 5 bintang4.5/5 (274)
- El fin de la Ansiedad y los MiedosDari EverandEl fin de la Ansiedad y los MiedosPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- La violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaDari EverandLa violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaPenilaian: 4 dari 5 bintang4/5 (2)
- Contra la ansiedad: Una guía completa para manejar emociones difícilesDari EverandContra la ansiedad: Una guía completa para manejar emociones difícilesPenilaian: 5 dari 5 bintang5/5 (58)
- Técnicas de resolución de problemas: En la vida diaria y profesionalDari EverandTécnicas de resolución de problemas: En la vida diaria y profesionalPenilaian: 5 dari 5 bintang5/5 (1)
- Tu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaDari EverandTu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaPenilaian: 5 dari 5 bintang5/5 (2)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDari EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressPenilaian: 5 dari 5 bintang5/5 (1)
- Pensamiento Crítico: Utiliza modelos mentales para desarrollar tomas de decisiones efectivas y habilidades de resolución de problemas. Supera los obstáculos cognitivos y las falacias en los sistemas para pensar con claridad en tu vida cotidiana.Dari EverandPensamiento Crítico: Utiliza modelos mentales para desarrollar tomas de decisiones efectivas y habilidades de resolución de problemas. Supera los obstáculos cognitivos y las falacias en los sistemas para pensar con claridad en tu vida cotidiana.Penilaian: 4.5 dari 5 bintang4.5/5 (33)
- Teoría polivagal práctica y terapiaDari EverandTeoría polivagal práctica y terapiaPenilaian: 5 dari 5 bintang5/5 (4)
- 7 tendencias digitales que cambiarán el mundoDari Everand7 tendencias digitales que cambiarán el mundoPenilaian: 4.5 dari 5 bintang4.5/5 (87)
- Liberación del trauma: Perdón y temblor es el caminoDari EverandLiberación del trauma: Perdón y temblor es el caminoPenilaian: 4 dari 5 bintang4/5 (4)
- Escritura terapéutica. El poder curativo de la expresión escritaDari EverandEscritura terapéutica. El poder curativo de la expresión escritaPenilaian: 5 dari 5 bintang5/5 (2)
- Lee a las personas como un libro: Cómo analizar, entender y predecir las emociones, los pensamientos, las intenciones y los comportamientos de las personasDari EverandLee a las personas como un libro: Cómo analizar, entender y predecir las emociones, los pensamientos, las intenciones y los comportamientos de las personasPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- No desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaDari EverandNo desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaPenilaian: 5 dari 5 bintang5/5 (13)