Anda mungkin juga menyukai
- 2020-04-20 India TodayDokumen68 halaman2020-04-20 India TodayHRBelum ada peringkat
- 60KW PDFDokumen1 halaman60KW PDFHRBelum ada peringkat
- Super Food Ideas - November 2019@books and MagazinesDokumen94 halamanSuper Food Ideas - November 2019@books and MagazinesHR0% (1)
- 30kW PDFDokumen1 halaman30kW PDFHRBelum ada peringkat
- Ginlong (Ningbo) Technologes Co.,Ltd Ginlong (Ningbo) Technologes Co.,LtdDokumen1 halamanGinlong (Ningbo) Technologes Co.,Ltd Ginlong (Ningbo) Technologes Co.,LtdHRBelum ada peringkat
- Solis 30K User ManualDokumen24 halamanSolis 30K User ManualHRBelum ada peringkat
- 1107e018a120025 3P20KW PDFDokumen1 halaman1107e018a120025 3P20KW PDFHRBelum ada peringkat
- Rebuild Your BodyDokumen30 halamanRebuild Your BodyHRBelum ada peringkat
- Solis 50K - V1 2Dokumen26 halamanSolis 50K - V1 2HRBelum ada peringkat
- The International Transferability of A Firm's AdvantageDokumen9 halamanThe International Transferability of A Firm's AdvantageHRBelum ada peringkat
- Harnessing Your Staff'S Informal NetworkDokumen9 halamanHarnessing Your Staff'S Informal NetworkHRBelum ada peringkat
- Firms As Knowledge BrokersDokumen19 halamanFirms As Knowledge BrokersHRBelum ada peringkat
- Econometric AnalysisDokumen3 halamanEconometric AnalysisHRBelum ada peringkat
- Draft - Smart Grid Handbook For Regulators and Policy Makers - Compressed PDFDokumen368 halamanDraft - Smart Grid Handbook For Regulators and Policy Makers - Compressed PDFHRBelum ada peringkat
- Alternative Backup OptionsDokumen2 halamanAlternative Backup OptionsHRBelum ada peringkat
- Protect Equipment From Earth Leakage and Ground Faults: L1 L2 L3 NDokumen1 halamanProtect Equipment From Earth Leakage and Ground Faults: L1 L2 L3 NHRBelum ada peringkat
- Datasheet Solis-50K 3phaseDokumen2 halamanDatasheet Solis-50K 3phaseHRBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- AÇO - DIN17100 St52-3Dokumen1 halamanAÇO - DIN17100 St52-3Paulo Henrique NascimentoBelum ada peringkat
- Ncomputing VSpace Server Management Console User ManualDokumen34 halamanNcomputing VSpace Server Management Console User ManualJeff IvanBelum ada peringkat
- Powered by QFD OnlineDokumen1 halamanPowered by QFD OnlineNiswa RochimBelum ada peringkat
- Writer Keyboard Shortcuts CheatsheetDokumen1 halamanWriter Keyboard Shortcuts CheatsheetBrian100% (3)
- AL Nafay Petroleum Corporation - Product ListDokumen1 halamanAL Nafay Petroleum Corporation - Product ListMuhammad EhsanBelum ada peringkat
- IMDSDokumen13 halamanIMDSJohn OoBelum ada peringkat
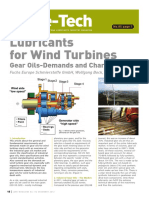
- Lube-Tech: Lubricants For Wind TurbinesDokumen6 halamanLube-Tech: Lubricants For Wind TurbinesMC ABelum ada peringkat
- Recommendation Handling of Norit GL 50Dokumen9 halamanRecommendation Handling of Norit GL 50Mátyás DalnokiBelum ada peringkat
- Jura Subito Operating Instructions Automatic 2 Cup Espresso Coffee MachineDokumen15 halamanJura Subito Operating Instructions Automatic 2 Cup Espresso Coffee MachineyangBelum ada peringkat
- Kalzip - Vapour Layer FR 0822 PDFDokumen2 halamanKalzip - Vapour Layer FR 0822 PDFBerat CakmakliBelum ada peringkat
- 1st Indian Near Surface Geophysics BrochureDokumen4 halaman1st Indian Near Surface Geophysics BrochureAdarsh TanejaBelum ada peringkat
- Debug 1214Dokumen3 halamanDebug 1214Anonymous B4WiRjBelum ada peringkat
- TK-C Transmitter PDFDokumen4 halamanTK-C Transmitter PDFGopal HegdeBelum ada peringkat
- Piping Handbook Hydrocarbon Processing 1968 PDFDokumen140 halamanPiping Handbook Hydrocarbon Processing 1968 PDFbogdan_chivulescuBelum ada peringkat
- Amplitude Shift KeyingDokumen3 halamanAmplitude Shift KeyingPurnendh ParuchuriBelum ada peringkat
- Business Dynamics in The 21st CenturyDokumen270 halamanBusiness Dynamics in The 21st CenturyskilmagBelum ada peringkat
- Pre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationDokumen3 halamanPre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationEugenio Jr. MatesBelum ada peringkat
- PDFDokumen255 halamanPDFwrite2arshad_mBelum ada peringkat
- Shaft Design Problem 10 - 12Dokumen9 halamanShaft Design Problem 10 - 12BernalynMalinaoBelum ada peringkat
- 91 194 DCDokumen57 halaman91 194 DCGusdeluxeBelum ada peringkat
- Mercruiser Service Manual #14 Alpha I Gen II Outdrives 1991-NewerDokumen715 halamanMercruiser Service Manual #14 Alpha I Gen II Outdrives 1991-NewerM5Melo100% (10)
- SIMODUAL2 Industrial Double Containment Piping System - Dual Pipes For Double The ProtectionDokumen32 halamanSIMODUAL2 Industrial Double Containment Piping System - Dual Pipes For Double The Protectionrade.paripovicBelum ada peringkat
- Wood Magazine Issue #189Dokumen96 halamanWood Magazine Issue #189bangbang63100% (1)
- Sagar Ovhalkar (Site)Dokumen2 halamanSagar Ovhalkar (Site)Dayanand WasateBelum ada peringkat
- Operating System Concepts 8th Edition Chapter 1 SummaryDokumen2 halamanOperating System Concepts 8th Edition Chapter 1 SummaryAlfred Fred100% (1)
- NCERT Class 7 Geography WaterDokumen9 halamanNCERT Class 7 Geography Waterbalamurali_aBelum ada peringkat
- PSC Girder MethodologyDokumen12 halamanPSC Girder MethodologySaurabh KumarBelum ada peringkat
- DP1100Dokumen3 halamanDP1100tunradotBelum ada peringkat
- Bsee201 B - Fluid MechanicsDokumen150 halamanBsee201 B - Fluid MechanicsMarvin GagarinBelum ada peringkat
- Email TMK88065 PDFDokumen3 halamanEmail TMK88065 PDFlily_ng3642Belum ada peringkat