Anda mungkin juga menyukai
- Accesorios para Pulmon de AireDokumen3 halamanAccesorios para Pulmon de Airesimon aguayoBelum ada peringkat
- Cronograma de Trabajo Adicional de COLOCADO de PIZARRA en Oficina de Gerencia Torres DuoDokumen2 halamanCronograma de Trabajo Adicional de COLOCADO de PIZARRA en Oficina de Gerencia Torres Duosimon aguayoBelum ada peringkat
- Diseñoi para 4 Oficina en 3dDokumen1 halamanDiseñoi para 4 Oficina en 3dsimon aguayoBelum ada peringkat
- Cronograma de Trabajo Adicional de COLOCADO DE ZOCALO en Oficina de Gerencia Torres Duo02Dokumen2 halamanCronograma de Trabajo Adicional de COLOCADO DE ZOCALO en Oficina de Gerencia Torres Duo02simon aguayoBelum ada peringkat
- Cronograma de Estantes Schlumberger 01Dokumen4 halamanCronograma de Estantes Schlumberger 01simon aguayoBelum ada peringkat
- Cronograma de Zocalo en Oficina de Gerencia Bloque A01Dokumen2 halamanCronograma de Zocalo en Oficina de Gerencia Bloque A01simon aguayoBelum ada peringkat
- Cronograma de Zocalo en Oficina de Gerencia Bloque A PDFDokumen2 halamanCronograma de Zocalo en Oficina de Gerencia Bloque A PDFsimon aguayoBelum ada peringkat
- Cronograma de Servicio de Reparacion de Gata Electrica 12 Volt 02Dokumen4 halamanCronograma de Servicio de Reparacion de Gata Electrica 12 Volt 02simon aguayoBelum ada peringkat
- Anexo MTT Preventivo de Eolicos Version 1.1Dokumen1 halamanAnexo MTT Preventivo de Eolicos Version 1.1simon aguayoBelum ada peringkat
- Plano Division Bloque C Torre Duo-ModeloDokumen1 halamanPlano Division Bloque C Torre Duo-Modelosimon aguayoBelum ada peringkat
- Cronograma de COMPACTACION Y NIVELACION DE 1000 MTS CUADRADOS03Dokumen2 halamanCronograma de COMPACTACION Y NIVELACION DE 1000 MTS CUADRADOS03simon aguayoBelum ada peringkat
- Cronograma de TRABAJOS EN RECEPCION DE OFICINA DE GERENCIA BLOQUE 04Dokumen3 halamanCronograma de TRABAJOS EN RECEPCION DE OFICINA DE GERENCIA BLOQUE 04simon aguayoBelum ada peringkat
- Resumen y DedicatoriaDokumen3 halamanResumen y Dedicatoriasimon aguayoBelum ada peringkat
- Cronograma de Servicio de Acondicionamiento de DuctosDokumen2 halamanCronograma de Servicio de Acondicionamiento de Ductossimon aguayoBelum ada peringkat
- CIRCUITO DeñltaDokumen3 halamanCIRCUITO Deñltasimon aguayoBelum ada peringkat
- Eliminar virus USB CMD archivos ocultosDokumen3 halamanEliminar virus USB CMD archivos ocultossimon aguayoBelum ada peringkat
- Chanchulla de Subes 2Dokumen2 halamanChanchulla de Subes 2simon aguayoBelum ada peringkat
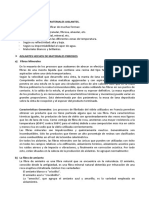
- Aislamiento térmico: clasificación y tipos de materiales aislantesDokumen12 halamanAislamiento térmico: clasificación y tipos de materiales aislantessimon aguayo100% (2)
- Características y consumo de instrumentos de mediciónDokumen3 halamanCaracterísticas y consumo de instrumentos de mediciónsimon aguayoBelum ada peringkat
- Cajetin GtzaDokumen2 halamanCajetin Gtzasimon aguayoBelum ada peringkat
- Reporte de Análisis VibracionalDokumen22 halamanReporte de Análisis Vibracionalsimon aguayoBelum ada peringkat
- Aspectos Constructivos de Un Transformador SecoDokumen4 halamanAspectos Constructivos de Un Transformador Secosimon aguayoBelum ada peringkat
- HORTICULTIRADokumen1 halamanHORTICULTIRAsimon aguayoBelum ada peringkat
- Arrancadores Suaves ORIGINAL2Dokumen4 halamanArrancadores Suaves ORIGINAL2simon aguayoBelum ada peringkat
- Universidad Técnica de OruroDokumen1 halamanUniversidad Técnica de Orurosimon aguayoBelum ada peringkat
- Fisiologia VegetalDokumen28 halamanFisiologia Vegetalsimon aguayo100% (1)
- Automoviles Marca ChinoDokumen12 halamanAutomoviles Marca Chinosimon aguayoBelum ada peringkat
- Cultivo de LechugaDokumen42 halamanCultivo de Lechugasimon aguayo100% (1)
- Tipos de HeladasDokumen2 halamanTipos de Heladassimon aguayoBelum ada peringkat
- Maual de Partes d6r IIIDokumen906 halamanMaual de Partes d6r IIIescorpionsjb83% (6)
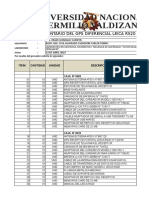
- Inventario Del Gps Rs20Dokumen22 halamanInventario Del Gps Rs20carlos alradoado calderonBelum ada peringkat
- Manual de Instalación Y Puesta en MarchaDokumen29 halamanManual de Instalación Y Puesta en MarchaIndira Olivo EscalanteBelum ada peringkat
- Manual de Operación y Mantenimiento Pizarras InteractivasDokumen9 halamanManual de Operación y Mantenimiento Pizarras InteractivasMichael LeivaBelum ada peringkat
- 10 - Ejecución de Subreparto Plan (D)Dokumen21 halaman10 - Ejecución de Subreparto Plan (D)ainara1986Belum ada peringkat
- Generalidades de PC SDokumen9 halamanGeneralidades de PC SElvis WilliamsBelum ada peringkat
- INFORME Elaboración Del Cable SerialDokumen9 halamanINFORME Elaboración Del Cable SerialcarlosmenorBelum ada peringkat
- Hoja Trabajo Semana 4 Paquetes 1Dokumen2 halamanHoja Trabajo Semana 4 Paquetes 1Dany OrellanaBelum ada peringkat
- Ejercicios Con PLDDokumen2 halamanEjercicios Con PLDCeliina Narumii Román HigaBelum ada peringkat
- Sistemas de Bases NumericasDokumen4 halamanSistemas de Bases NumericasJosé ChaudharyBelum ada peringkat
- Aac PDFDokumen129 halamanAac PDFDgm Cb Gfm DgBelum ada peringkat
- Presentación InfurbanixDokumen13 halamanPresentación InfurbanixPelícula Flor de PrimaveraBelum ada peringkat
- Manual Pieza de Madera en AutocadDokumen76 halamanManual Pieza de Madera en AutocadHector BautistaBelum ada peringkat
- Digitalizar 12 de Sep. de 2020Dokumen1 halamanDigitalizar 12 de Sep. de 2020Jose Miguel MedinaBelum ada peringkat
- Diego TorresDokumen2 halamanDiego TorresDiego Real Torres NinaBelum ada peringkat
- ASRock - Productos - Placas Base - G31M-VS2Dokumen2 halamanASRock - Productos - Placas Base - G31M-VS2Yamel CurielBelum ada peringkat
- Dpic3 GuiaDokumen20 halamanDpic3 Guiacsar_pcBelum ada peringkat
- Guia 4Dokumen11 halamanGuia 4Jose O CuellarBelum ada peringkat
- Guia Instalacion ArcPadDokumen13 halamanGuia Instalacion ArcPadRHLeoneBelum ada peringkat
- Partes de La PCDokumen2 halamanPartes de La PCManuel rodasBelum ada peringkat
- Manual para Impresora HP m225 - 226 WDokumen144 halamanManual para Impresora HP m225 - 226 WlixetteBelum ada peringkat
- Serra de Bancada StanleyDokumen40 halamanSerra de Bancada StanleyGuinhoIvp100% (1)
- Informe de Avance Informatica e Internet - ETDokumen3 halamanInforme de Avance Informatica e Internet - ETLuis Alberto Sanchez CheroBelum ada peringkat
- Autocad 2016 BasicoDokumen110 halamanAutocad 2016 Basicoawys61434100% (6)
- Probador de MosfetDokumen3 halamanProbador de MosfetIvan Mena MenaBelum ada peringkat
- Arquitectura 64 BitsDokumen27 halamanArquitectura 64 BitsGean Carlos Morales CastroBelum ada peringkat
- Manual L170Dokumen13 halamanManual L170Nur TreBelum ada peringkat
- Sistemas Operativos: ¿Qué es y su HistoriaDokumen38 halamanSistemas Operativos: ¿Qué es y su HistoriaFernandoBelum ada peringkat
- Diseño Sistemas Digitales Prototipado (FPGAs y CPLDS)Dokumen2 halamanDiseño Sistemas Digitales Prototipado (FPGAs y CPLDS)Edgar Danilo Lituma RamírezBelum ada peringkat
- Generacion de Los Sistemas Operativos PDFDokumen3 halamanGeneracion de Los Sistemas Operativos PDFRosalio Aguilar Montiel0% (1)