Anda mungkin juga menyukai
- Virt WRKDokumen8 halamanVirt WRKJason MakBelum ada peringkat
- Frpsdulqj GHQVLW - Iruhfdvwv Yld ZHLJKWHG Olnholkrrg Udwlr WHVWV DV - PSWRWLF DQG Errwvwuds PHWKRGVDokumen37 halamanFrpsdulqj GHQVLW - Iruhfdvwv Yld ZHLJKWHG Olnholkrrg Udwlr WHVWV DV - PSWRWLF DQG Errwvwuds PHWKRGVTamara KnoxBelum ada peringkat
- 1 9781611974522 BMDokumen7 halaman1 9781611974522 BMTamara KnoxBelum ada peringkat
- smts-2 Theory of Structures by B.C. Punmia Text PDFDokumen497 halamansmts-2 Theory of Structures by B.C. Punmia Text PDFAman Dubey100% (1)
- Site Specific Wave Parameters For Texas Coastal Bridges: Final ReportDokumen124 halamanSite Specific Wave Parameters For Texas Coastal Bridges: Final ReportTamara KnoxBelum ada peringkat
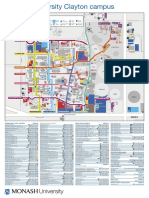
- 3 ClaytoncolourDokumen1 halaman3 ClaytoncolourTamara KnoxBelum ada peringkat
- Modal Analysis SpreadsheetDokumen13 halamanModal Analysis Spreadsheettanha56313955Belum ada peringkat
- LongitudinalDokumen20 halamanLongitudinalTamara KnoxBelum ada peringkat
- Iast Lect19Dokumen9 halamanIast Lect19Sachin SilmanaBelum ada peringkat
- PVW Intro PDFDokumen7 halamanPVW Intro PDFTamara KnoxBelum ada peringkat
- Laplace PDFDokumen13 halamanLaplace PDFTamara KnoxBelum ada peringkat
- ASCE LaTeX Guide for EMDokumen1 halamanASCE LaTeX Guide for EMTamara KnoxBelum ada peringkat
- Matrx Stiffness MethodDokumen34 halamanMatrx Stiffness MethodArviSanBelum ada peringkat
- Design Rating Rail Bridge Majedski 00006Dokumen25 halamanDesign Rating Rail Bridge Majedski 00006rkgcrriBelum ada peringkat
- Examples Paper 4Dokumen4 halamanExamples Paper 4Tamara KnoxBelum ada peringkat
- Extreme Value TheoryDokumen2 halamanExtreme Value TheoryTamara KnoxBelum ada peringkat
- Civ L 436 Virtual WorkDokumen4 halamanCiv L 436 Virtual WorkTamara KnoxBelum ada peringkat
- Project III Notes 1011Dokumen218 halamanProject III Notes 1011Tamara KnoxBelum ada peringkat
- Civ L 436 Notes On BeamsDokumen8 halamanCiv L 436 Notes On BeamsTamara KnoxBelum ada peringkat
- Examples Paper 4 SOLUTIONSDokumen10 halamanExamples Paper 4 SOLUTIONSTamara KnoxBelum ada peringkat
- Condeck HP Composite Decking Product Technical ManualDokumen48 halamanCondeck HP Composite Decking Product Technical ManualTamara KnoxBelum ada peringkat
- IMAC XIII 13th 13-21-5 The Effects Window Functions Trigger Levels FRF Estimations FromDokumen10 halamanIMAC XIII 13th 13-21-5 The Effects Window Functions Trigger Levels FRF Estimations FromTamara KnoxBelum ada peringkat
- Column SizingDokumen6 halamanColumn SizingTamara KnoxBelum ada peringkat
- Bridge Deck Analysis Methods RevisitedDokumen12 halamanBridge Deck Analysis Methods RevisitedTamara KnoxBelum ada peringkat
- Column SizingDokumen6 halamanColumn SizingTamara KnoxBelum ada peringkat
- 1031 - Slice Forces and Moments in SolidsDokumen12 halaman1031 - Slice Forces and Moments in SolidsTamara KnoxBelum ada peringkat
- Monitoring Bridges As Aid To ManagementDokumen21 halamanMonitoring Bridges As Aid To ManagementTamara KnoxBelum ada peringkat
- Shakedown Algorithm PDFDokumen32 halamanShakedown Algorithm PDFTamara KnoxBelum ada peringkat
- Instructors Solutions ManualDokumen1.010 halamanInstructors Solutions ManualTamara Knox100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5782)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Transactional AnalysisDokumen30 halamanTransactional AnalysissabyasachiBelum ada peringkat
- The Duchess DealDokumen269 halamanThe Duchess DealDharshena100% (11)
- Scatter Plots Learning Event-3Dokumen19 halamanScatter Plots Learning Event-3api-607250696Belum ada peringkat
- Ch2 HT ConductionDokumen87 halamanCh2 HT ConductionUzair IjazBelum ada peringkat
- TOJan Feb 16Dokumen40 halamanTOJan Feb 16kumararajBelum ada peringkat
- First Masterclass Progress Test 1Dokumen4 halamanFirst Masterclass Progress Test 1Billy Herington fullmasterBelum ada peringkat
- El 114 The-Adventures-of-Tom-Sawyer-by-Mark-TwainDokumen11 halamanEl 114 The-Adventures-of-Tom-Sawyer-by-Mark-TwainGhreniel V. Benecito100% (1)
- Miguel Angel Quimbay TinjacaDokumen9 halamanMiguel Angel Quimbay TinjacaLaura LombanaBelum ada peringkat
- Emergency procedures for shipboard fire suppression systemsDokumen1 halamanEmergency procedures for shipboard fire suppression systemsImmorthalBelum ada peringkat
- Manajeman Reproduksi Pada AnjingDokumen32 halamanManajeman Reproduksi Pada AnjingMuhammad FarhanBelum ada peringkat
- 67 Golden Rules For Successful LifeDokumen2 halaman67 Golden Rules For Successful Lifeviveksharma51100% (1)
- q2 w6 Asteroids Comets MeteorsDokumen61 halamanq2 w6 Asteroids Comets MeteorsxenarealeBelum ada peringkat
- The Works of Lord Byron, Vol. 3 - Hebrew Melodies, PoemsDokumen361 halamanThe Works of Lord Byron, Vol. 3 - Hebrew Melodies, Poemszpervan1Belum ada peringkat
- Copyright WorksheetDokumen3 halamanCopyright WorksheetJADEN GOODWINBelum ada peringkat
- Programmable Logic Controller (PLC)Dokumen19 halamanProgrammable Logic Controller (PLC)Jason Sonido88% (8)
- Developments in Microbiology: Learning ObjectivesDokumen289 halamanDevelopments in Microbiology: Learning Objectivesலலிதா மீனாட்சிசுந்தரம்Belum ada peringkat
- Fake News Detection PPT 1Dokumen13 halamanFake News Detection PPT 1Sri VarshanBelum ada peringkat
- LSE100 Past Year Questions (2014/5)Dokumen2 halamanLSE100 Past Year Questions (2014/5)Jingwen ZhangBelum ada peringkat
- EnglishDokumen19 halamanEnglishAliBelum ada peringkat
- Inclusion/Exclusion PrincipleDokumen6 halamanInclusion/Exclusion Principlekeelia1saBelum ada peringkat
- Mind Map of "Architecture+Participation"Dokumen1 halamanMind Map of "Architecture+Participation"Maysan MamounBelum ada peringkat
- Tropical Fruit CHAPTER-3Dokumen32 halamanTropical Fruit CHAPTER-3Jeylan FekiBelum ada peringkat
- Gantry Crane Design Calculations - Google SearchDokumen2 halamanGantry Crane Design Calculations - Google SearchJebin Abraham100% (1)
- Residency Programs in The USADokumen28 halamanResidency Programs in The USAAnastasiafynnBelum ada peringkat
- Sanyasa Suktam with meaningDokumen3 halamanSanyasa Suktam with meaningkarthik saiBelum ada peringkat
- Speech To Third Form English.Dokumen1 halamanSpeech To Third Form English.maxBelum ada peringkat
- Summary of Jordan Peterson's Biblical LecturesDokumen25 halamanSummary of Jordan Peterson's Biblical LecturesRufus_DinaricusBelum ada peringkat
- Today's Court Decision on Land Registration AppealDokumen6 halamanToday's Court Decision on Land Registration AppealJohn Lester TanBelum ada peringkat
- Fault Code: 352 Sensor Supply 1 Circuit - Voltage Below Normal or Shorted To Low SourceDokumen3 halamanFault Code: 352 Sensor Supply 1 Circuit - Voltage Below Normal or Shorted To Low SourceFernando AguilarBelum ada peringkat
- Indian Railways Service of Engineers: A Glorious ServiceDokumen5 halamanIndian Railways Service of Engineers: A Glorious ServiceHabib Ur RahmanBelum ada peringkat