Anda mungkin juga menyukai
- Log SolutionDokumen176 halamanLog SolutionAkarsh AggarwalBelum ada peringkat
- 6 - Non - Linear - Schroedinger - Equation PDFDokumen25 halaman6 - Non - Linear - Schroedinger - Equation PDFErasmo VizzaccaroBelum ada peringkat
- Lecture Notes 2 - PVA Analysis - Part 2 - F2018Dokumen19 halamanLecture Notes 2 - PVA Analysis - Part 2 - F2018Mahmut KILIÇBelum ada peringkat
- Math 28 Unit 1.2Dokumen25 halamanMath 28 Unit 1.2Law NamucoBelum ada peringkat
- The Lossless Divider PDFDokumen4 halamanThe Lossless Divider PDFsourabhbasuBelum ada peringkat
- QuadeqDokumen7 halamanQuadeqОлександр РєзнікBelum ada peringkat
- Chapter3 Kinematic Analysis of MechanismsDokumen15 halamanChapter3 Kinematic Analysis of MechanismsMohammed Al-OdatBelum ada peringkat
- Univ AnsDokumen17 halamanUniv AnsPrincely ImmanuelBelum ada peringkat
- 3 Problems Vectors Force SystemsDokumen37 halaman3 Problems Vectors Force Systemsmsi appleBelum ada peringkat
- Lecture 05 - Chap 3 Modeling of Generators and TransformersDokumen23 halamanLecture 05 - Chap 3 Modeling of Generators and TransformersHabes NoraBelum ada peringkat
- Introduction To Complex NumberDokumen5 halamanIntroduction To Complex NumberMirza WaqarBelum ada peringkat
- 790 Notefile 1 1658405580 PDFDokumen83 halaman790 Notefile 1 1658405580 PDFRaj AwinasheBelum ada peringkat
- MATLABDokumen25 halamanMATLABTamim Islam JoyBelum ada peringkat
- Solution of Quiz-7 On Root Locus Plot Spring 2017Dokumen1 halamanSolution of Quiz-7 On Root Locus Plot Spring 2017zakir abbasBelum ada peringkat
- Study of Open Delta TransformerDokumen3 halamanStudy of Open Delta TransformertangouzeBelum ada peringkat
- Equivalent Circuit Parameters of 3 Phase 3 Winding TransformerDokumen4 halamanEquivalent Circuit Parameters of 3 Phase 3 Winding TransformerThriloknath pallaBelum ada peringkat
- Smith ChartDokumen35 halamanSmith Chartjainam sharma100% (1)
- Lect 04 2020Dokumen4 halamanLect 04 2020Hukry AingBelum ada peringkat
- m5l25 PDFDokumen6 halamanm5l25 PDFaishwarya biradarBelum ada peringkat
- 3852Dokumen27 halaman3852Wana BilaBelum ada peringkat
- Lecture-05 Simple Circuit ReductionsDokumen8 halamanLecture-05 Simple Circuit Reductionsnonton youtubeBelum ada peringkat
- Ee1102 1Dokumen3 halamanEe1102 1maansi2429Belum ada peringkat
- Microwave Formula SheetDokumen6 halamanMicrowave Formula Sheetunity123d deewBelum ada peringkat
- Star-Delta and Delta-Star TransformationsDokumen19 halamanStar-Delta and Delta-Star TransformationsDossDossBelum ada peringkat
- Subject Name: Communication Networks and Transmission Lines Subject Code: EC-5004 Semester: 5Dokumen16 halamanSubject Name: Communication Networks and Transmission Lines Subject Code: EC-5004 Semester: 5Harsh PatelBelum ada peringkat
- AIOT (JM) - SolutionDokumen7 halamanAIOT (JM) - SolutionmannesraoBelum ada peringkat
- Nuclear Models: 7.1 Fermi Gas Model 7.2 Shell ModelDokumen17 halamanNuclear Models: 7.1 Fermi Gas Model 7.2 Shell ModelZeeshan ZebBelum ada peringkat
- Tutorial 4Dokumen4 halamanTutorial 4Wan AleeyaBelum ada peringkat
- Power CombinersDokumen13 halamanPower CombinersDenis CarlosBelum ada peringkat
- IMONST2 2023 Primary Solutions and DiscussionDokumen14 halamanIMONST2 2023 Primary Solutions and DiscussionKhoon Yu TanBelum ada peringkat
- AY23-24, Sem - II - CSE - E1 - TimetablesDokumen2 halamanAY23-24, Sem - II - CSE - E1 - Timetableshidew30196Belum ada peringkat
- 14 ELC4340 Spring13 Power System MatricesDokumen40 halaman14 ELC4340 Spring13 Power System MatricesAnonymous AFFiZnBelum ada peringkat
- Pygon. TTSN: TH Oilrnn9Dokumen5 halamanPygon. TTSN: TH Oilrnn9Hayoung SoBelum ada peringkat
- DocScanner 2021. 12. 4. 00.06Dokumen5 halamanDocScanner 2021. 12. 4. 00.06Hayoung SoBelum ada peringkat
- MAT232 w21 Lectures Week 10Dokumen5 halamanMAT232 w21 Lectures Week 10jesicaBelum ada peringkat
- ECS332 2015 Postmidterm HWDokumen69 halamanECS332 2015 Postmidterm HWDeadpool 001Belum ada peringkat
- Cone Shot Part 5Dokumen34 halamanCone Shot Part 5shashwatmalik10Belum ada peringkat
- Dynamic Combinational Circuits: - Dynamic Circuits - Domino Logic - np-CMOS (Zipper CMOS)Dokumen29 halamanDynamic Combinational Circuits: - Dynamic Circuits - Domino Logic - np-CMOS (Zipper CMOS)vardhanBelum ada peringkat
- Exp 1 Thevenin, SDokumen5 halamanExp 1 Thevenin, SGyanendra GiriBelum ada peringkat
- Chapter 4Dokumen26 halamanChapter 4Krishna Kumar AlagarBelum ada peringkat
- APPALACHIAN SPRING - Aaron Copland (1943 - 1944)Dokumen17 halamanAPPALACHIAN SPRING - Aaron Copland (1943 - 1944)Francisco Da Costa0% (1)
- 2013 HCI Prelim Paper 2 Mark SchemeDokumen13 halaman2013 HCI Prelim Paper 2 Mark SchemeYan Shen TanBelum ada peringkat
- Solid Area Scan Conversion or Visible Surface DetectionDokumen67 halamanSolid Area Scan Conversion or Visible Surface Detectionshivam kumarBelum ada peringkat
- WA0002 Number TheoryDokumen82 halamanWA0002 Number Theoryraghav43gargBelum ada peringkat
- Lecture14 Ee474 Miller Ota PDFDokumen22 halamanLecture14 Ee474 Miller Ota PDFShanBelum ada peringkat
- AY22-23 CSE E1 S1 Time Table-271222Dokumen1 halamanAY22-23 CSE E1 S1 Time Table-271222vikasBelum ada peringkat
- Notes On 3rd String + SongsDokumen2 halamanNotes On 3rd String + SongsGordon LiBelum ada peringkat
- Expression of Network Power Loss As A Function of Generation PowerDokumen20 halamanExpression of Network Power Loss As A Function of Generation PowerPradip KhatriBelum ada peringkat
- ACDC - JailbreakDokumen10 halamanACDC - JailbreakEnzoBelum ada peringkat
- Module 4 HybridDokumen21 halamanModule 4 HybridU20EC131SANKALP PRADHAN SVNITBelum ada peringkat
- MODULE 7 - Buckling of FramesDokumen42 halamanMODULE 7 - Buckling of FramesJay RickBelum ada peringkat
- M3C PCIM2012 KammererDokumen8 halamanM3C PCIM2012 KammererEfra IbacetaBelum ada peringkat
- Analog Electronics July 2017 (2015 Scheme)Dokumen3 halamanAnalog Electronics July 2017 (2015 Scheme)Movies and tv showsBelum ada peringkat
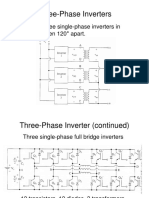
- Consider Three Single-Phase Inverters in Parallel, Driven 120° ApartDokumen27 halamanConsider Three Single-Phase Inverters in Parallel, Driven 120° ApartSarwar Hosen SimonBelum ada peringkat
- Ac Nodal and Mesh AnalysisDokumen26 halamanAc Nodal and Mesh AnalysissuchiBelum ada peringkat
- 1 Slutsky Matrix Og Negative Deniteness: 1.1 SolutionDokumen5 halaman1 Slutsky Matrix Og Negative Deniteness: 1.1 SolutionDeepali PatilBelum ada peringkat
- Hydr-02 KompositDokumen14 halamanHydr-02 Kompositria ramadhinnyBelum ada peringkat
- MYP Unit Planner - MathDokumen5 halamanMYP Unit Planner - MathMarija CvetkovicBelum ada peringkat
- KrautKramer DM4E DM4DL - ManualDokumen38 halamanKrautKramer DM4E DM4DL - ManualfdsgfdgBelum ada peringkat
- New Techniques of Predictions # 1Dokumen5 halamanNew Techniques of Predictions # 1bhagathi nageswara raoBelum ada peringkat
- 747Dokumen12 halaman747GurdevBaines100% (3)
- SeptalkanDokumen5 halamanSeptalkanReniBelum ada peringkat
- Huawei FusionServer RH2288 V3 Data Sheet PDFDokumen2 halamanHuawei FusionServer RH2288 V3 Data Sheet PDFMartenMattisenBelum ada peringkat
- Pro Tester ManualDokumen49 halamanPro Tester ManualRobson AlencarBelum ada peringkat
- Big Data Executive Survey 2019 Findings Updated 010219 1Dokumen16 halamanBig Data Executive Survey 2019 Findings Updated 010219 1satmaniaBelum ada peringkat
- Uenr0997 12 00 - Manuals Service Modules - Testing & AdjustingDokumen90 halamanUenr0997 12 00 - Manuals Service Modules - Testing & Adjustingmostafa aliBelum ada peringkat
- 5S For Service Organizations and OfficesDokumen28 halaman5S For Service Organizations and OfficesSilviaBelum ada peringkat
- Solar Water Heater MOU LaodiceaDokumen2 halamanSolar Water Heater MOU LaodiceaZeeshan YasinBelum ada peringkat
- Erich Segal Doctors PDFDokumen2 halamanErich Segal Doctors PDFAlicia13% (8)
- Understanding Terrorism and Political Violence PDFDokumen304 halamanUnderstanding Terrorism and Political Violence PDFmihaela buzatuBelum ada peringkat
- TA-Modulator EN LowDokumen16 halamanTA-Modulator EN Lowkap4enijBelum ada peringkat
- Aesa Vs PesaDokumen30 halamanAesa Vs Pesakab11512100% (1)
- 120-21 TM RF HandbookDokumen164 halaman120-21 TM RF HandbookbaymanBelum ada peringkat
- So You Want To Have Your Own Cosmetics BrandDokumen3 halamanSo You Want To Have Your Own Cosmetics BrandCarlosBelum ada peringkat
- Design of Electrical Machines NotesDokumen24 halamanDesign of Electrical Machines Notesmadhes14Belum ada peringkat
- Dubai Holding FactsheetDokumen2 halamanDubai Holding FactsheetHarley soulBelum ada peringkat
- Oct2020 GCE Final PDFDokumen30 halamanOct2020 GCE Final PDFGavinBelum ada peringkat
- Financial Accounting Report (Partnership - Group 2)Dokumen20 halamanFinancial Accounting Report (Partnership - Group 2)syednaim0300Belum ada peringkat
- Breuer - Sun & Shadow (Inglés) PDFDokumen18 halamanBreuer - Sun & Shadow (Inglés) PDFccorrea74Belum ada peringkat
- Digital Album On Prominent Social ScientistsDokumen10 halamanDigital Album On Prominent Social ScientistsOliver Antony ThomasBelum ada peringkat
- Ipcrf Core Values 2019 - FinalDokumen23 halamanIpcrf Core Values 2019 - FinalFrendelyn p. Gador100% (4)
- Roman Helmet From SivacDokumen33 halamanRoman Helmet From SivacArachne DreamweaverBelum ada peringkat
- Present Simple Present ContinuousDokumen3 halamanPresent Simple Present ContinuousFernando SabinoBelum ada peringkat
- Saudi Arabia Companies Contact DetailsDokumen64 halamanSaudi Arabia Companies Contact DetailsYAGHMOURE ABDALRAHMAN86% (69)
- Lesson 15 Validity of Measurement and Reliability PDFDokumen3 halamanLesson 15 Validity of Measurement and Reliability PDFMarkChristianRobleAlmazanBelum ada peringkat
- TGA Interpretation of Data, Sources of ErrorDokumen28 halamanTGA Interpretation of Data, Sources of ErrorUsman GhaniBelum ada peringkat
- APCO CSAA ANS2 101 1webfinalDokumen38 halamanAPCO CSAA ANS2 101 1webfinalJUAN CAMILO VALENCIA VALENCIABelum ada peringkat