Anda mungkin juga menyukai
- Solution Manual for an Introduction to Equilibrium ThermodynamicsDari EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsBelum ada peringkat
- FormulasDokumen18 halamanFormulasElisif DeFairBelum ada peringkat
- Handouts MD Day 4Dokumen7 halamanHandouts MD Day 4James Ivan AnoreBelum ada peringkat
- Handouts MD Day 4Dokumen7 halamanHandouts MD Day 4Obane Ordnael P.Belum ada peringkat
- Helical Gears: Free Body DiagramDokumen9 halamanHelical Gears: Free Body Diagramterrence miguel balitaBelum ada peringkat
- Machine DesignDokumen15 halamanMachine DesignYaBelum ada peringkat
- FormulasDokumen7 halamanFormulastthy kBelum ada peringkat
- Handouts MD Day 3Dokumen8 halamanHandouts MD Day 3James Ivan AnoreBelum ada peringkat
- Handouts MD Day 6Dokumen8 halamanHandouts MD Day 6James Ivan AnoreBelum ada peringkat
- Machine Design Formula ListDokumen7 halamanMachine Design Formula ListHarpreet Randhawa100% (3)
- Handouts MD Day 6Dokumen8 halamanHandouts MD Day 6DE GUZMAN, MELVIN CARLO A.Belum ada peringkat
- 1 - Shaft DesignDokumen6 halaman1 - Shaft DesignLurking RogueBelum ada peringkat
- Machine Design MD by S K Mondal T&Q.0003 PDFDokumen70 halamanMachine Design MD by S K Mondal T&Q.0003 PDFRam ChandraBelum ada peringkat
- Banking of Highway Curves:: W G V R W V GRDokumen10 halamanBanking of Highway Curves:: W G V R W V GRRetro GamerBelum ada peringkat
- Handouts MD Day 5Dokumen7 halamanHandouts MD Day 5James Ivan AnoreBelum ada peringkat
- Meshing Spur GearsDokumen25 halamanMeshing Spur GearsCherrydhelBelum ada peringkat
- Circular Motion: T 2π r T holdsDokumen13 halamanCircular Motion: T 2π r T holdsUti MichaelBelum ada peringkat
- Design of A Bevel Gear National InstitutDokumen13 halamanDesign of A Bevel Gear National InstitutGauravBelum ada peringkat
- PHYS 2210 Equation Sheet 3 Chapter 12: Static EquilibriumDokumen1 halamanPHYS 2210 Equation Sheet 3 Chapter 12: Static EquilibriumNicholas WelchBelum ada peringkat
- Engineering Data Sheet CalculationsDokumen6 halamanEngineering Data Sheet Calculationsनिखिल बायवारBelum ada peringkat
- Data BookDokumen20 halamanData BookMitul patelBelum ada peringkat
- Spur GearDokumen5 halamanSpur GearMelindaBelum ada peringkat
- Mechanical Engineering Power ScrewsDokumen12 halamanMechanical Engineering Power ScrewsGaurav AgarwalBelum ada peringkat
- Formula 5Dokumen7 halamanFormula 5Raj SakariaBelum ada peringkat
- CH 9Dokumen50 halamanCH 9ohhmoon165Belum ada peringkat
- Clutches & Brakes PDFDokumen75 halamanClutches & Brakes PDFSHAMANAND TELIBelum ada peringkat
- Machine Design - Day 1: 2 D D R R + +Dokumen4 halamanMachine Design - Day 1: 2 D D R R + +Gabrielle InfanteBelum ada peringkat
- Day 1Dokumen4 halamanDay 1Kim CastenoBelum ada peringkat
- GAS FORCES ANALYSISDokumen26 halamanGAS FORCES ANALYSISKaradam Patel0% (1)
- Circuit CH9Dokumen24 halamanCircuit CH9MMBelum ada peringkat
- Bolts and Power Screw Lec Online ClassDokumen4 halamanBolts and Power Screw Lec Online Classtest 2Belum ada peringkat
- BELTSDokumen14 halamanBELTSFABROA, RALPH EDWARD T.Belum ada peringkat
- Design of Worm GearsDokumen9 halamanDesign of Worm GearsMugisha OlivierBelum ada peringkat
- Horizontal Alignment IDokumen31 halamanHorizontal Alignment IAravind KumarBelum ada peringkat
- Handouts MD Day 3Dokumen8 halamanHandouts MD Day 3Obane Ordnael P.Belum ada peringkat
- Machine Design FormulasDokumen22 halamanMachine Design FormulasJay Mark CayonteBelum ada peringkat
- Gear Mechanisms - Class-Notes 2Dokumen3 halamanGear Mechanisms - Class-Notes 2steve ogagaBelum ada peringkat
- Second condition of equilibrium; ∑τ = 0 Physics Formulas by MeasurementsDokumen2 halamanSecond condition of equilibrium; ∑τ = 0 Physics Formulas by MeasurementsJan AlamBelum ada peringkat
- Lifting ClampDokumen10 halamanLifting ClampwallachiaBelum ada peringkat
- Design of Journal Bearings (Week 9-10)Dokumen54 halamanDesign of Journal Bearings (Week 9-10)Muhammad Zohaib AliBelum ada peringkat
- First Worm Finding Number of Teeth and Gear Diameter: DW+DG 2 1.5 in +4.7 in 2Dokumen4 halamanFirst Worm Finding Number of Teeth and Gear Diameter: DW+DG 2 1.5 in +4.7 in 2mitha07Belum ada peringkat
- Cross SectionDokumen31 halamanCross SectionSimanta SharmaBelum ada peringkat
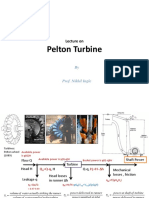
- Pelton Turbine: Department of Mechanical Engg Indian Institute of Technology (ISM), DhanbadDokumen8 halamanPelton Turbine: Department of Mechanical Engg Indian Institute of Technology (ISM), DhanbadnikBelum ada peringkat
- Review Problems Problem No.1: N D N D D DDokumen7 halamanReview Problems Problem No.1: N D N D D D3 stacksBelum ada peringkat
- ME 528 REVIEW MACHINE DESIGN FORMULASDokumen27 halamanME 528 REVIEW MACHINE DESIGN FORMULASNiño Gerard JabagatBelum ada peringkat
- DC MachinesDokumen10 halamanDC Machinesprince ian cruzBelum ada peringkat
- Reducer GearDokumen2 halamanReducer GearAditya DarmawanBelum ada peringkat
- Optimized Design For TSHDs Swell CompensatorDokumen13 halamanOptimized Design For TSHDs Swell CompensatorTomasz FelknerBelum ada peringkat
- WINSEM2018-19 MEE4007 ETH MB310A VL2018195003564 Reference Material I Helical Gears FundamentalDokumen19 halamanWINSEM2018-19 MEE4007 ETH MB310A VL2018195003564 Reference Material I Helical Gears FundamentalSahil PatelBelum ada peringkat
- Formula and correlation:: σ =W K K K P F K K JDokumen2 halamanFormula and correlation:: σ =W K K K P F K K JMuhammad Usama 796-FET/BSME/F18Belum ada peringkat
- GearsDokumen12 halamanGearsmgualdiBelum ada peringkat
- Chapter - 3: Design of Bevel GearDokumen10 halamanChapter - 3: Design of Bevel GearDaniel AbBelum ada peringkat
- Handouts MD Day 2Dokumen7 halamanHandouts MD Day 2Cantera, Cris Bryan E.Belum ada peringkat
- AC MachinesDokumen8 halamanAC Machinesprince ian cruzBelum ada peringkat
- Bolt Selection - NT BOLT G9 V15Dokumen8 halamanBolt Selection - NT BOLT G9 V15Choa Pei ShuangBelum ada peringkat
- Theory of Gears r3Dokumen53 halamanTheory of Gears r3gamini ranaweeraBelum ada peringkat
- AAE 251 Formulas: Standard AtmosphereDokumen6 halamanAAE 251 Formulas: Standard Atmospherepilotf15Belum ada peringkat
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Dari EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Belum ada peringkat
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsDari EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsBelum ada peringkat
- 1.2 Involutes - Question Bank and SolutionsDokumen4 halaman1.2 Involutes - Question Bank and SolutionsMartin De Boras PragashBelum ada peringkat
- B94-6 R1995 E1984Dokumen21 halamanB94-6 R1995 E1984zojoBelum ada peringkat
- ZF 4HP20 (LMO) : 4 SPEED FWD (Electronic Control) Code: 1019 000 XXXDokumen5 halamanZF 4HP20 (LMO) : 4 SPEED FWD (Electronic Control) Code: 1019 000 XXXМихаил КаминскийBelum ada peringkat
- Overview of Mitsubishi Services: Download All Pages PDFDokumen27 halamanOverview of Mitsubishi Services: Download All Pages PDFHeryanto SyamBelum ada peringkat
- AGITATORS Brochure TacminaDokumen12 halamanAGITATORS Brochure TacminaSantoshkota123Belum ada peringkat
- HG Metaris MH365 Bushing Pumps Cut-Sheet WebDokumen4 halamanHG Metaris MH365 Bushing Pumps Cut-Sheet WebVictor Hugo Benitez PaezBelum ada peringkat
- IR ESScatalog PDFDokumen84 halamanIR ESScatalog PDFLuis Antonio Garcia Esparza100% (1)
- Lectures Notes On: Machine Dynamics IIDokumen145 halamanLectures Notes On: Machine Dynamics IIHaider NeamaBelum ada peringkat
- Generate Electricity by Walking Stairs in 38 CharactersDokumen2 halamanGenerate Electricity by Walking Stairs in 38 Charactersanu_collegeBelum ada peringkat
- ME 352 - All Problem Class - 14-18 BatchDokumen125 halamanME 352 - All Problem Class - 14-18 BatchEntertainment GamingBelum ada peringkat
- CLES5500, - 02 (CLES5500, CLES5500-02, BUCL5500, BUCL5500-01) Rev5-12Dokumen117 halamanCLES5500, - 02 (CLES5500, CLES5500-02, BUCL5500, BUCL5500-01) Rev5-12njava1978Belum ada peringkat
- Katalog Hoist PDFDokumen12 halamanKatalog Hoist PDFsupriadi90315Belum ada peringkat
- Spur GearsDokumen8 halamanSpur GearstopjobBelum ada peringkat
- PETRO TCS Ops Manual 700-15Dokumen52 halamanPETRO TCS Ops Manual 700-15paulm3565Belum ada peringkat
- Drive Lines, Differentials, and Power TrainsDokumen44 halamanDrive Lines, Differentials, and Power TrainsAnonymous QiMB2lBCJLBelum ada peringkat
- Cryogenic Nano-Actuator: ProceedingsDokumen14 halamanCryogenic Nano-Actuator: ProceedingsAmirBelum ada peringkat
- P0843Dokumen2 halamanP0843Sergio NicoliniBelum ada peringkat
- Funk™ 23000 HMD Transmission: Industrial Drivetrain SpecificationsDokumen1 halamanFunk™ 23000 HMD Transmission: Industrial Drivetrain SpecificationsNoe Melgarejo PonceBelum ada peringkat
- TRAINING REPORT ON ESCORT INDIA PVT. LTDDokumen34 halamanTRAINING REPORT ON ESCORT INDIA PVT. LTDVarun AggarwalBelum ada peringkat
- MCA1PRADokumen45 halamanMCA1PRAsal27adam0% (1)
- Rope CouplingDokumen4 halamanRope CouplingKamal KapaBelum ada peringkat
- A404 (30TH), A413, A470, A670 (31TH) : 3 Speed FWD Lock Up & Non Lock UpDokumen4 halamanA404 (30TH), A413, A470, A670 (31TH) : 3 Speed FWD Lock Up & Non Lock Upkrzysiek1975100% (1)
- CVT-Transmission G1 TR690Dokumen52 halamanCVT-Transmission G1 TR690Rogério Freitas100% (2)
- Gear Failures PDFDokumen19 halamanGear Failures PDFermaksan0% (1)
- Shell Open Gear Lubricants Basics Webinar Session-1-Of-3Dokumen35 halamanShell Open Gear Lubricants Basics Webinar Session-1-Of-3dpomahBelum ada peringkat
- Measuring Flow with Variable Area FlowmetersDokumen44 halamanMeasuring Flow with Variable Area FlowmeterssenatBelum ada peringkat
- Rumus Perhitungan Spurs GearDokumen4 halamanRumus Perhitungan Spurs GearILham Fakhrul ArifinBelum ada peringkat
- 2008 R6 Kit ManualDokumen61 halaman2008 R6 Kit ManualBender Rodriguez100% (3)
- Landing Gear R 01Dokumen56 halamanLanding Gear R 01Priyo Dwi Wijaksono100% (1)