Anda mungkin juga menyukai
- Line Follower Robot ProjectDokumen6 halamanLine Follower Robot ProjectPravin GaretaBelum ada peringkat
- Line - Following - Robot 2019 09 11 12 49 PDFDokumen3 halamanLine - Following - Robot 2019 09 11 12 49 PDFMegharaj GoudarBelum ada peringkat
- Line Follower Robot Final PPT 1Dokumen16 halamanLine Follower Robot Final PPT 1harshil mangeBelum ada peringkat
- On Minor ProjectDokumen21 halamanOn Minor ProjectMANISHA S67% (3)
- Line Follower RobotDokumen16 halamanLine Follower RobotRohit sharmaBelum ada peringkat
- 21.line Following RobotDokumen78 halaman21.line Following RobotsathishBelum ada peringkat
- Line Follower and Obstacle AvoidingDokumen12 halamanLine Follower and Obstacle AvoidingFaisal Nouman60% (5)
- Chapter 4 - Synchronous CountersDokumen12 halamanChapter 4 - Synchronous CountersMinh PhúBelum ada peringkat
- Line Following RobotDokumen18 halamanLine Following RobotKamran FaisalBelum ada peringkat
- Line Follower RobotDokumen4 halamanLine Follower Robotmari_euBelum ada peringkat
- Final Copy of Line Follower RobotDokumen9 halamanFinal Copy of Line Follower RobotAhuja ShivamBelum ada peringkat
- 1 CH14 - IC TechnologiesDokumen20 halaman1 CH14 - IC Technologiesdaovanthanh_bk2007Belum ada peringkat
- Line Follower Robot Using ArduinoDokumen5 halamanLine Follower Robot Using ArduinoJesus Eduardo Campos ArcosBelum ada peringkat
- Line Follower Atmega16 Vienna UniversityDokumen30 halamanLine Follower Atmega16 Vienna UniversityBuihung HungBelum ada peringkat
- Line Follower RobotDokumen5 halamanLine Follower Robotsud93100% (2)
- Line Follower Robot Using ArduinoDokumen13 halamanLine Follower Robot Using Arduinolizhi2012Belum ada peringkat
- Line Tracking RobotDokumen45 halamanLine Tracking Robotminaadly100% (1)
- Chapter 4 - Synchronous MOD CountersDokumen8 halamanChapter 4 - Synchronous MOD CountersMinh PhúBelum ada peringkat
- Line Following RobotDokumen17 halamanLine Following RobotSon TeaBelum ada peringkat
- Line Follower Robot ArduinoDokumen5 halamanLine Follower Robot ArduinoMikoko YanosudaBelum ada peringkat
- Line Follower RobotDokumen16 halamanLine Follower RobotVenkat Munnangi100% (1)
- Line FollowerDokumen47 halamanLine Followeryogi6804Belum ada peringkat
- Line Follower RobotDokumen29 halamanLine Follower RobotSebastin AshokBelum ada peringkat
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDokumen51 halamanWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraBelum ada peringkat
- Gesture Controlled RobotDokumen36 halamanGesture Controlled RobotTeena Sharma44% (9)
- Line Following Robot Final Year ProjectsDokumen37 halamanLine Following Robot Final Year ProjectsOmer Jamal Abdalgbar100% (1)
- Line Following Robot With Color Detection PDFDokumen10 halamanLine Following Robot With Color Detection PDFpaishkepeng100% (1)
- Line Following RobotDokumen54 halamanLine Following RobotGautam RaaviBelum ada peringkat
- Human Following Robot-2 PDFDokumen7 halamanHuman Following Robot-2 PDFSUDEEPTA CHANDRA PAULBelum ada peringkat
- PC Controlled Wireless Multipurpose Robot For Surveillance SystemDokumen41 halamanPC Controlled Wireless Multipurpose Robot For Surveillance SystemFiroz Ahmed KhanBelum ada peringkat
- Line Follower Robot. 03docDokumen30 halamanLine Follower Robot. 03docBilal Ali Ahmad0% (1)
- A Tether-Less Legged Piezoelectric Miniature Robot Using Bounding Gait Locomotion For Bidirectional MotionDokumen6 halamanA Tether-Less Legged Piezoelectric Miniature Robot Using Bounding Gait Locomotion For Bidirectional MotionHassan HaririBelum ada peringkat
- Industrial Disaster ManagementDokumen68 halamanIndustrial Disaster ManagementMaheshchandra Yadav100% (1)
- Line Follower RobotDokumen16 halamanLine Follower RobotSebastian NistoricăBelum ada peringkat
- Arm Robot (Scorbot ER-III) : A. IntroductionDokumen3 halamanArm Robot (Scorbot ER-III) : A. IntroductionYehezkiel88Belum ada peringkat
- Fire Fight Robotics SensorDokumen60 halamanFire Fight Robotics Sensorsaurabhbittu kumarBelum ada peringkat
- Learn The Basics First!: Flip FlopsDokumen7 halamanLearn The Basics First!: Flip FlopsBharath Kumar100% (1)
- Microcontroller Based Rail Tracking and Accident Avoidance SystemDokumen3 halamanMicrocontroller Based Rail Tracking and Accident Avoidance SystemMamatha MarriBelum ada peringkat
- Lec. 1 - Elec. Circuit I - Revision For DC CircuitsDokumen28 halamanLec. 1 - Elec. Circuit I - Revision For DC CircuitsEsmaeelBelum ada peringkat
- Line Follower Using 89s52Dokumen43 halamanLine Follower Using 89s52coolmaleankur100% (2)
- Line Follower Robot ProjectDokumen45 halamanLine Follower Robot ProjectJeffery YipBelum ada peringkat
- Line Follower Robot PDFDokumen5 halamanLine Follower Robot PDFNameet JainBelum ada peringkat
- Robotics Course StructureDokumen4 halamanRobotics Course StructurerohitBelum ada peringkat
- Line FollowerDokumen13 halamanLine FollowerFarah AzamBelum ada peringkat
- Hand Gesture Control Robot PDFDokumen3 halamanHand Gesture Control Robot PDFMd IrfanBelum ada peringkat
- Intelligent Industrial Security Surveillance System With Auto SmsDokumen3 halamanIntelligent Industrial Security Surveillance System With Auto SmsMamatha MarriBelum ada peringkat
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyDokumen30 halamanAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Line Follower Robot Using ArduinoDokumen5 halamanLine Follower Robot Using Arduinochockalingam athilingam100% (1)
- Field RoboticsDokumen70 halamanField RoboticsSkanda SwaroopBelum ada peringkat
- Robotics - SeminarDokumen48 halamanRobotics - SeminarAnshuman TripathiBelum ada peringkat
- Application of RFID Technology and The Maximum Spanning Tree Algorithum For Solving Vehicle Emission in Cities On IOTDokumen71 halamanApplication of RFID Technology and The Maximum Spanning Tree Algorithum For Solving Vehicle Emission in Cities On IOTsrivalli pBelum ada peringkat
- The Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)Dokumen6 halamanThe Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)VASANTHKUMAR M SBelum ada peringkat
- Gourav Final Report Addhar 123Dokumen14 halamanGourav Final Report Addhar 123Divyansh MathurBelum ada peringkat
- Line FollowerDokumen15 halamanLine FollowerShivam VaishnavBelum ada peringkat
- Line Follower Robot Using Arduino: PBL Review Report OnDokumen10 halamanLine Follower Robot Using Arduino: PBL Review Report OnAvinash KumarBelum ada peringkat
- Project Report: Line Following RobotDokumen12 halamanProject Report: Line Following RobotAhsan MuradBelum ada peringkat
- Int Line Follower RobotDokumen8 halamanInt Line Follower RobotPuneeth ShettigarBelum ada peringkat
- Project Report: Digital Logic DesignsDokumen17 halamanProject Report: Digital Logic DesignsSiddique FarooqBelum ada peringkat
- Motor Car (Construction, Equipment and Use) Regulations 1952Dokumen18 halamanMotor Car (Construction, Equipment and Use) Regulations 1952Tarek MohamedBelum ada peringkat
- Shielding RF Components at The Package LeveDokumen12 halamanShielding RF Components at The Package LeveSebastian ReguanBelum ada peringkat
- PHP Unit-4Dokumen11 halamanPHP Unit-4Nidhi BhatiBelum ada peringkat
- Mysql Connector - Version 1.1: PropertiesDokumen6 halamanMysql Connector - Version 1.1: PropertiesbruxotoloBelum ada peringkat
- City PlanningDokumen2 halamanCity PlanningNidhi KalraBelum ada peringkat
- Fisa Tehnica Camera Supraveghere Exterior Dahua Starlight HAC-HFW1230T-A-0360BDokumen3 halamanFisa Tehnica Camera Supraveghere Exterior Dahua Starlight HAC-HFW1230T-A-0360BDanielTeglasBelum ada peringkat
- Equipment Installation Verification Procedure:: How To Use This DocumentDokumen3 halamanEquipment Installation Verification Procedure:: How To Use This DocumentBasha Yazn AnjakBelum ada peringkat
- iTS - Intelligent Traffic System: Daga Games StudioDokumen38 halamaniTS - Intelligent Traffic System: Daga Games StudioSlow Pork FFBelum ada peringkat
- DTC P2714 Pressure Control Solenoid "D" Performance (Shift Solenoid Valve SLT)Dokumen7 halamanDTC P2714 Pressure Control Solenoid "D" Performance (Shift Solenoid Valve SLT)Igor MarkovicBelum ada peringkat
- Iso 683-17-2014-10Dokumen30 halamanIso 683-17-2014-10ashav patel100% (1)
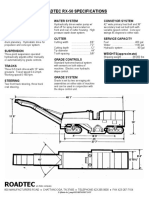
- RX 50 SpecDokumen1 halamanRX 50 SpecFelipe HernándezBelum ada peringkat
- Characteristics of Digital DataDokumen6 halamanCharacteristics of Digital DataArdi DiraBelum ada peringkat
- Adam PMB53 Moisture Analyzer User ManualDokumen84 halamanAdam PMB53 Moisture Analyzer User Manualpwrage6561Belum ada peringkat
- Session 3 - Track 7 - Wireless Charging PDFDokumen37 halamanSession 3 - Track 7 - Wireless Charging PDFPraveen KumarBelum ada peringkat
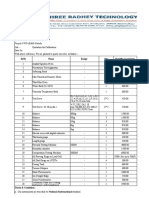
- SRT/2020-21/11/29 To. M/S Deputy Director Research Lab: Punjab PWD (B&R) PatialaDokumen4 halamanSRT/2020-21/11/29 To. M/S Deputy Director Research Lab: Punjab PWD (B&R) PatialaAyush GoyalBelum ada peringkat
- PHD Thesis Download Free Computer ScienceDokumen4 halamanPHD Thesis Download Free Computer Sciencegingermartinerie100% (2)
- Infoblox Datasheet Bloxone DdiDokumen3 halamanInfoblox Datasheet Bloxone DdiSudhakar AruchamyBelum ada peringkat
- Stimulus 2 Tutorials Book TOCDokumen5 halamanStimulus 2 Tutorials Book TOCsobibrownBelum ada peringkat
- Summer Training: Submitted ByDokumen29 halamanSummer Training: Submitted ByBadd ManBelum ada peringkat
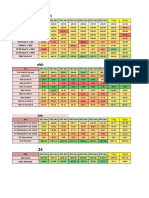
- NBH DBH BBH Comparision SikarDokumen21 halamanNBH DBH BBH Comparision SikarNikhil Kumar Gupta100% (1)
- B.E - Intake - 2021-22 - 452652Dokumen16 halamanB.E - Intake - 2021-22 - 452652enr E&RBelum ada peringkat
- Basic Introduction To The UCCE Servers and ComponentsDokumen24 halamanBasic Introduction To The UCCE Servers and ComponentsDaksin SpBelum ada peringkat
- Kinematic Optimisation of An Automotive Door: June 2009Dokumen13 halamanKinematic Optimisation of An Automotive Door: June 2009rake1984Belum ada peringkat
- NFE10 Master Guide en v13Dokumen26 halamanNFE10 Master Guide en v13dri0510Belum ada peringkat
- MCU Based Multi Functions Automated Corn Planting RoverDokumen82 halamanMCU Based Multi Functions Automated Corn Planting Roveraldrinvic0005Belum ada peringkat
- Model: Service ManualDokumen94 halamanModel: Service ManualSteve WalschotBelum ada peringkat
- Gd129Ni Single Point Infra-Red Gas DetectorDokumen2 halamanGd129Ni Single Point Infra-Red Gas Detectorryan azzaamBelum ada peringkat
- Roland Vs 640 Mechanical DrawingDokumen40 halamanRoland Vs 640 Mechanical DrawingEdwardo RamirezBelum ada peringkat
- Prius Energy FlowDokumen1 halamanPrius Energy Flowmsfz751Belum ada peringkat
- Editedfinal Manuscript - .NET12a Group 3 (Chapt 1-5)Dokumen41 halamanEditedfinal Manuscript - .NET12a Group 3 (Chapt 1-5)Jhonel Mogueis Dela CruzBelum ada peringkat