Anda mungkin juga menyukai
- Chapter 8: Generation of Floor Response Spectra and Multiple Support Excitation G. R. Reddy & R. K. VermaDokumen14 halamanChapter 8: Generation of Floor Response Spectra and Multiple Support Excitation G. R. Reddy & R. K. VermaDivya Dev C MBelum ada peringkat
- Second Year Engineering Mathematics Laboratory Exercise 2: Eigen Systems and Pdes Hilary TermDokumen9 halamanSecond Year Engineering Mathematics Laboratory Exercise 2: Eigen Systems and Pdes Hilary TermJoe HicksBelum ada peringkat
- Review: Modeling Damping in Mechanical Engineering StructuresDokumen10 halamanReview: Modeling Damping in Mechanical Engineering Structuresuamiranda3518Belum ada peringkat
- Experiment 1Dokumen15 halamanExperiment 1Kushal DesardaBelum ada peringkat
- Dynamics and Control Design Via LQR and Sdre Methods For A Maglev SystemDokumen13 halamanDynamics and Control Design Via LQR and Sdre Methods For A Maglev SystemVinay KashyapBelum ada peringkat
- Op THE EFFECT OF TUNED-MASS DAMPERS ON THEDokumen16 halamanOp THE EFFECT OF TUNED-MASS DAMPERS ON THEDivya MahalsekarBelum ada peringkat
- Práctica 8. Introducción A Xcos II: ObjetivoDokumen12 halamanPráctica 8. Introducción A Xcos II: ObjetivoMarcos MartinezBelum ada peringkat
- Dynamics Response Spectrum Analysis - Shear Plane FrameDokumen35 halamanDynamics Response Spectrum Analysis - Shear Plane Frameamrsaleh999Belum ada peringkat
- Workspace Boundaries of A Planar Tensegrity Mechanism by ArsenaultDokumen17 halamanWorkspace Boundaries of A Planar Tensegrity Mechanism by ArsenaultTensegrity WikiBelum ada peringkat
- Limitation Imposed On Structural DesignerDokumen2 halamanLimitation Imposed On Structural DesignerdvarsastryBelum ada peringkat
- Predicting The Earthquake Response of Buildings Using Equivalent Single Degree of Freedom SystemDokumen9 halamanPredicting The Earthquake Response of Buildings Using Equivalent Single Degree of Freedom SystemElvis GuizadoBelum ada peringkat
- EE132 Lab1 OL Vs CLDokumen3 halamanEE132 Lab1 OL Vs CLthinkberry22Belum ada peringkat
- Assignment Questions: Course: Computing Applications For Mechanical Systems (MEEN-561)Dokumen26 halamanAssignment Questions: Course: Computing Applications For Mechanical Systems (MEEN-561)cayericaBelum ada peringkat
- Output-Only Modal Analysis On Operating Wind Turbines Application To Simulated DataDokumen10 halamanOutput-Only Modal Analysis On Operating Wind Turbines Application To Simulated DataLiyana 리야나 RoslanBelum ada peringkat
- Parallelization and Load Balancing of A Dynamic Mesh Method For Moving Boundary CFDDokumen15 halamanParallelization and Load Balancing of A Dynamic Mesh Method For Moving Boundary CFDdidaBelum ada peringkat
- Low-Cost Surrogate Modeling For Rapid Design Optimization of Antenna StructuresDokumen4 halamanLow-Cost Surrogate Modeling For Rapid Design Optimization of Antenna StructureshosseinBelum ada peringkat
- ME 563 Homework # 5 Solutions Fall 2010Dokumen7 halamanME 563 Homework # 5 Solutions Fall 2010Salvador SilveyraBelum ada peringkat
- Mahfouf 2000Dokumen6 halamanMahfouf 2000Phat Luu TienBelum ada peringkat
- Modelling and Linear Control of The CraneDokumen5 halamanModelling and Linear Control of The CraneAriangga Bagas WibisonoBelum ada peringkat
- 2011-4 PaperDokumen9 halaman2011-4 PaperMohamedMagdyBelum ada peringkat
- High Rise and EQDokumen6 halamanHigh Rise and EQMaiwand KhanBelum ada peringkat
- (2009) Research On Unbalance Torque of The Three Axis Air Bearing Based PlatformDokumen5 halaman(2009) Research On Unbalance Torque of The Three Axis Air Bearing Based PlatformAlex YangBelum ada peringkat
- tm-2016-4-19 DESIGN AND ANALYSIS OF THE HYDRAULIC ARM FOR MOUNTING ON A LIGHT GOODS VEHICLEDokumen5 halamantm-2016-4-19 DESIGN AND ANALYSIS OF THE HYDRAULIC ARM FOR MOUNTING ON A LIGHT GOODS VEHICLEGaston NunezBelum ada peringkat
- Accelerated Relaxation' or Direct Solution? Future Prospects For FemDokumen11 halamanAccelerated Relaxation' or Direct Solution? Future Prospects For FemJoaquin VieraBelum ada peringkat
- Lab2 Expt1Dokumen2 halamanLab2 Expt1Sureil GupteBelum ada peringkat
- PMSM Open Corcuit FaultDokumen8 halamanPMSM Open Corcuit Faultzy lBelum ada peringkat
- Steady State Sinusoidal Transient Analysis: An Example CircuitDokumen4 halamanSteady State Sinusoidal Transient Analysis: An Example CircuitTonyRobinsonP.PontesBelum ada peringkat
- Comparative Study of The Geometric Incompatibilities in The Dinamica of Expandable StructuresDokumen11 halamanComparative Study of The Geometric Incompatibilities in The Dinamica of Expandable StructureskarrakukafeoBelum ada peringkat
- Vibration Analysis of Discrete One and Two Degree of Freedom SystemsDokumen11 halamanVibration Analysis of Discrete One and Two Degree of Freedom SystemsNaveen FootyBelum ada peringkat
- Modal Space Sliding-Mode Control of Structures: Earthquake Engng. Struct. Dyn. 27, 1303-1314 (1998)Dokumen12 halamanModal Space Sliding-Mode Control of Structures: Earthquake Engng. Struct. Dyn. 27, 1303-1314 (1998)pippoBelum ada peringkat
- Seismic Requirement of Power TransformerDokumen10 halamanSeismic Requirement of Power TransformerPrashant PuriBelum ada peringkat
- Robust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDokumen9 halamanRobust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDr Saba TareqBelum ada peringkat
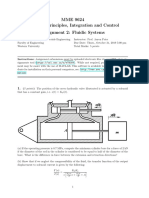
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDokumen2 halamanMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelBelum ada peringkat
- Modeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentDokumen13 halamanModeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentLittle_skipBelum ada peringkat
- Sloshing Tank Sbs Tutorial CosmosDokumen10 halamanSloshing Tank Sbs Tutorial Cosmosdarklord338Belum ada peringkat
- Campeanu Tranzitoriu SincronDokumen10 halamanCampeanu Tranzitoriu SincronvalentinmullerBelum ada peringkat
- Convex Optimization For Spring Design in Series Elastic Actuators From Theory To PracticeDokumen6 halamanConvex Optimization For Spring Design in Series Elastic Actuators From Theory To PracticeYuan HUANGBelum ada peringkat
- Fractal Dimension As Measure of Control TimeDokumen8 halamanFractal Dimension As Measure of Control Timecsernak2Belum ada peringkat
- Matlab AssignmentDokumen11 halamanMatlab AssignmentCan I get 20 subs before 2022Belum ada peringkat
- Introduction To MATLAB 3rd Ed Etter ProblemsDokumen11 halamanIntroduction To MATLAB 3rd Ed Etter ProblemsAndy OcegueraBelum ada peringkat
- A Numerical Study of Ship's Rolling MotionDokumen9 halamanA Numerical Study of Ship's Rolling Motionreza84Belum ada peringkat
- 1112012913dynamics Response Spectrum Analysis PDFDokumen33 halaman1112012913dynamics Response Spectrum Analysis PDFHectoreRodriguezlBelum ada peringkat
- 6 R Session: Multivariate Extremes and Bayesian InferenceDokumen7 halaman6 R Session: Multivariate Extremes and Bayesian InferencePhamNtBelum ada peringkat
- Structural Mechanics Laboratory: Project ReportDokumen10 halamanStructural Mechanics Laboratory: Project ReportJayanth KumarBelum ada peringkat
- Cilamce2017 0805 Papic CamilaufpeDokumen11 halamanCilamce2017 0805 Papic CamilaufpeMarlos José Ribeiro GuimarãesBelum ada peringkat
- Cauchy Residue TheoremDokumen11 halamanCauchy Residue TheoremAditi MukkolathBelum ada peringkat
- Wflo CpmipDokumen16 halamanWflo CpmipvsukrishnaBelum ada peringkat
- Coaxial Circular Array: Studies Related To Sidelobe Suppressed Beam Patterns For Underwater Transducer ApplicationDokumen3 halamanCoaxial Circular Array: Studies Related To Sidelobe Suppressed Beam Patterns For Underwater Transducer ApplicationQuang Huy ĐỗBelum ada peringkat
- Software Verification: Example 2 Three-Story Plane Frame - Dynamic Response Spectrum Analysis Problem DescriptionDokumen3 halamanSoftware Verification: Example 2 Three-Story Plane Frame - Dynamic Response Spectrum Analysis Problem DescriptionAnitha Hassan KabeerBelum ada peringkat
- 45-@@@EXTREME MOTION RESPONSE ANALYSIS OF MOORED Semi Submersible-1995Dokumen21 halaman45-@@@EXTREME MOTION RESPONSE ANALYSIS OF MOORED Semi Submersible-1995Ali Ghasemi Koohi KheiliBelum ada peringkat
- Using SDM To Train Neural Networks For Solving Modal Sensitivity ProblemsDokumen6 halamanUsing SDM To Train Neural Networks For Solving Modal Sensitivity ProblemsOscar Daga CaravantesBelum ada peringkat
- AHC For DrillingDokumen21 halamanAHC For DrillingYuhBelum ada peringkat
- Domme 1967Dokumen12 halamanDomme 1967Carlos ChávezBelum ada peringkat
- Computer Solution: Digital Electromagnetic Transients Multiphase NetworksDokumen12 halamanComputer Solution: Digital Electromagnetic Transients Multiphase NetworksObed GarcíaBelum ada peringkat
- STRL Dynamics M. TechDokumen4 halamanSTRL Dynamics M. TechNandeesh SreenivasappaBelum ada peringkat
- Korotkov Auc2008Dokumen12 halamanKorotkov Auc2008klomps_jrBelum ada peringkat
- Are We Ready For ELcentroDokumen55 halamanAre We Ready For ELcentroSaikat KabirajBelum ada peringkat
- Response Spectrum Analysis and Design Response SpectraDokumen20 halamanResponse Spectrum Analysis and Design Response SpectraLaidon Zekaj0% (2)
- A Fast Modal Technique For The Computation of The Campbell Diagram of Multi-Degree-Of-Freedom RotorsDokumen18 halamanA Fast Modal Technique For The Computation of The Campbell Diagram of Multi-Degree-Of-Freedom RotorsRafael SoaresBelum ada peringkat
- MCS-011 Solved Assignment 2015-16 IpDokumen12 halamanMCS-011 Solved Assignment 2015-16 IpJigar NanduBelum ada peringkat
- Viewnet Diy PricelistDokumen2 halamanViewnet Diy PricelistKhay SaadBelum ada peringkat
- A Simplified Two-Stage Method To Estimate The Settlement and Bending Moment of Upper Tunnel Considering The Interaction of Undercrossing Twin TunnelsDokumen32 halamanA Simplified Two-Stage Method To Estimate The Settlement and Bending Moment of Upper Tunnel Considering The Interaction of Undercrossing Twin TunnelsJianfeng XueBelum ada peringkat
- KSB - Submersible Pump - Ama Porter 501 SEDokumen30 halamanKSB - Submersible Pump - Ama Porter 501 SEZahid HussainBelum ada peringkat
- 360-Pungue Iwrm Strategy PresentationDokumen30 halaman360-Pungue Iwrm Strategy PresentationEdyz Piedadis PereiraBelum ada peringkat
- R123 UpdateDokumen2 halamanR123 Updateasayed_1@hotmail.comBelum ada peringkat
- Metalband SawDokumen7 halamanMetalband SawRichard JongBelum ada peringkat
- Software TestingDokumen4 halamanSoftware TestingX DevilXBelum ada peringkat
- Lab Manual 11 Infrared SpectrosDokumen5 halamanLab Manual 11 Infrared SpectrosLuca Selva CampobassoBelum ada peringkat
- FHV19 - Exhibitor Manual - 10 DECEMBER - Manual PDFDokumen50 halamanFHV19 - Exhibitor Manual - 10 DECEMBER - Manual PDFHien Hien NguyenBelum ada peringkat
- Toyota Vios Ecu Wiring DiagramDokumen4 halamanToyota Vios Ecu Wiring DiagramSri Yuniati17% (6)
- Pt. Partono Fondas: Company ProfileDokumen34 halamanPt. Partono Fondas: Company Profileiqbal urbandBelum ada peringkat
- TRCM Safe Parking: Technical InformationDokumen2 halamanTRCM Safe Parking: Technical InformationMirek BudaBelum ada peringkat
- MET Till DEC 2018 PDFDokumen171 halamanMET Till DEC 2018 PDFt.srinivasanBelum ada peringkat
- Language Processing System:-: CompilerDokumen6 halamanLanguage Processing System:-: CompilerRenganathan rameshBelum ada peringkat
- 3 3 1 Material Sorter Design ChallengeDokumen3 halaman3 3 1 Material Sorter Design Challengeapi-343534512Belum ada peringkat
- Seminar Report ON "Linux"Dokumen17 halamanSeminar Report ON "Linux"Ayush BhatBelum ada peringkat
- Head Office:: Speciality Urethanes Private LimitedDokumen9 halamanHead Office:: Speciality Urethanes Private Limitedashsatao8929Belum ada peringkat
- Properties of Building Materials and Their Importance in ConstructionDokumen5 halamanProperties of Building Materials and Their Importance in ConstructionDaisy Jane LulabBelum ada peringkat
- Department of Education: Republic of The PhilippinesDokumen14 halamanDepartment of Education: Republic of The PhilippinesRich TactaconBelum ada peringkat
- Quarter-Wave Impedance TransformerDokumen4 halamanQuarter-Wave Impedance TransformerEric SkinnerBelum ada peringkat
- M Block PDFDokumen45 halamanM Block PDFKristina ViskovićBelum ada peringkat
- Cooling Water BasicsDokumen163 halamanCooling Water BasicsEduardo Castillo100% (1)
- Apple A9Dokumen10 halamanApple A9Savithri NandadasaBelum ada peringkat
- Design Procedure For Journal BearingsDokumen4 halamanDesign Procedure For Journal BearingsSwaminathan100% (1)
- Us06-106 850 01 01 02 PDFDokumen6 halamanUs06-106 850 01 01 02 PDFF2CANALESBelum ada peringkat
- PT 0817 Cebu Room Assignment PDFDokumen16 halamanPT 0817 Cebu Room Assignment PDFPhilBoardResultsBelum ada peringkat
- Desmophen 1200 - en - 00134597 17947398 20766463Dokumen3 halamanDesmophen 1200 - en - 00134597 17947398 20766463Sabri AeroChemBelum ada peringkat
- Transfer Action in Sap HRDokumen3 halamanTransfer Action in Sap HRKarthi MrvkBelum ada peringkat
- The Effects of Crankshaft Offset On The Engine FrictionDokumen15 halamanThe Effects of Crankshaft Offset On The Engine Frictionqingcaohe100% (1)