Anda mungkin juga menyukai
- Cap. 3 EquilibrioDokumen40 halamanCap. 3 EquilibrioSebastian Canchis AlvarezBelum ada peringkat
- Equilibrio de una partícula y sistemas de fuerzasDokumen50 halamanEquilibrio de una partícula y sistemas de fuerzaschristianBelum ada peringkat
- Equilibrio de Traslación .Dokumen4 halamanEquilibrio de Traslación .Julio CabreraBelum ada peringkat
- Problemas 1 Condicion Del EquilibrioDokumen9 halamanProblemas 1 Condicion Del EquilibrioNick Mares75% (4)
- Cap 3 Equilibrio de La PartículaDokumen36 halamanCap 3 Equilibrio de La PartículaMateo Padilla HidalgoBelum ada peringkat
- UNIDAD 1.semana1-Clase2JDokumen13 halamanUNIDAD 1.semana1-Clase2JJair PaucarBelum ada peringkat
- Ecuaciones de equilibrio y tensiones en sistemas estáticos de menos deDokumen18 halamanEcuaciones de equilibrio y tensiones en sistemas estáticos de menos deFREDDY MARTIN CAYCHO GAMARRA100% (1)
- SSE-FI-EJ04-ESTÁTICA (1RA Y 2DA Condición de Equilibrio)Dokumen4 halamanSSE-FI-EJ04-ESTÁTICA (1RA Y 2DA Condición de Equilibrio)Franklin Muñoz PalominoBelum ada peringkat
- Prácticas Dirigidas - Física 2021 - 1Dokumen18 halamanPrácticas Dirigidas - Física 2021 - 1The Walking DeadBelum ada peringkat
- Estatica DCL y EquilibrioDokumen6 halamanEstatica DCL y EquilibrioRoyBelum ada peringkat
- Equilibrio de partículas y diagramas de cuerpo libreDokumen7 halamanEquilibrio de partículas y diagramas de cuerpo libreELDA GUADALUPE VALDEZ COLOCHOBelum ada peringkat
- Problemas de Equilibrio de Un Cuerpo rígido-MS 1-2013Dokumen14 halamanProblemas de Equilibrio de Un Cuerpo rígido-MS 1-2013Luis PerezBelum ada peringkat
- Control 9 - EstáticaDokumen6 halamanControl 9 - EstáticaLaura Gómez LeytonBelum ada peringkat
- Clases EstaticaDokumen147 halamanClases EstaticaJuan Diego VelásquezBelum ada peringkat
- Equilibrio de La PartículaDokumen39 halamanEquilibrio de La PartículaBelkin LopezBelum ada peringkat
- Practico de EstaticaDokumen4 halamanPractico de EstaticaJosé Manuel Alvarez Ayala100% (2)
- Equilibrio de una partícula - Apuntes de EstáticaDokumen7 halamanEquilibrio de una partícula - Apuntes de EstáticaIgnacio Avalos100% (1)
- Leyes de NewtonDokumen3 halamanLeyes de NewtonJhair Diaz Peche 1Belum ada peringkat
- Estática: Física José Luis Guerrero LimachiDokumen3 halamanEstática: Física José Luis Guerrero LimachiDavid Ccañihua QuispeBelum ada peringkat
- Ejercicios Resueltos de Ingenieria Ingenieria Fisica Estatica de La ParticulaDokumen12 halamanEjercicios Resueltos de Ingenieria Ingenieria Fisica Estatica de La ParticulaJorge Aparicio100% (1)
- 1.6 Equlibrio de Una Particula 2021Dokumen11 halaman1.6 Equlibrio de Una Particula 2021manzanopinedainesdelcarmenBelum ada peringkat
- Repaso SM01Dokumen4 halamanRepaso SM01Terry Coronado QuicañoBelum ada peringkat
- FÍSICADokumen3 halamanFÍSICAHarryLiteraturaBelum ada peringkat
- 2.4 Equilibrio de Una PartículaDokumen5 halaman2.4 Equilibrio de Una PartículaNoé TalaveraBelum ada peringkat
- Estática - Equilibrio de PartículasDokumen23 halamanEstática - Equilibrio de PartículasOziel CereceroBelum ada peringkat
- Sistemas Estáticamente IndeterminadosDokumen5 halamanSistemas Estáticamente IndeterminadosDavid PastenBelum ada peringkat
- ArmaduraDokumen25 halamanArmaduraJavier QuispeBelum ada peringkat
- Teorema de LamyDokumen5 halamanTeorema de LamyRuben PachasBelum ada peringkat
- Repaso final examen física electromagnetismo termodinámicaDokumen14 halamanRepaso final examen física electromagnetismo termodinámicaantonio alcantaraBelum ada peringkat
- Momentos y EquilibriosDokumen20 halamanMomentos y EquilibriosLuis eduardo La torre AdrianzénBelum ada peringkat
- Solución Pre Paracial Fisica 1Dokumen5 halamanSolución Pre Paracial Fisica 1SOFIA GONZALEZBelum ada peringkat
- Semana N°06 - FísicaDokumen2 halamanSemana N°06 - FísicaAldahir TorresBelum ada peringkat
- Estructuras: Def: Sistema de Miembros Unidos Entre Si y Construido paraDokumen34 halamanEstructuras: Def: Sistema de Miembros Unidos Entre Si y Construido paraMAYCOL JUNIOR QUINTANA VIERABelum ada peringkat
- Primer Examen - SolucionarioDokumen9 halamanPrimer Examen - SolucionarioJosh WalkerBelum ada peringkat
- Taller 1 - Equilibrio de La Partícula en El PlanoDokumen11 halamanTaller 1 - Equilibrio de La Partícula en El PlanoMap magnetismoBelum ada peringkat
- Fuerzas Distribuidas e PDFDokumen8 halamanFuerzas Distribuidas e PDFLuis RemaheBelum ada peringkat
- Ejercicios Propuestos Fisica 3Dokumen28 halamanEjercicios Propuestos Fisica 3Ariana SthefanyBelum ada peringkat
- Estarica IIDokumen6 halamanEstarica IIvictor raulBelum ada peringkat
- Capitulo 4 Estatica PDFDokumen14 halamanCapitulo 4 Estatica PDFMateo SalazarBelum ada peringkat
- EJERCICIOS DinamicaDokumen22 halamanEJERCICIOS Dinamicafrank frank50% (2)
- Induccion Electromagnetica Debido Al Movimiento Relaitvo de UnDokumen16 halamanInduccion Electromagnetica Debido Al Movimiento Relaitvo de UnEdy EdyBelum ada peringkat
- Práctica Nº6 II-2016Dokumen3 halamanPráctica Nº6 II-2016Diego ApazaBelum ada peringkat
- Semana5 Fisica Arq PDFDokumen21 halamanSemana5 Fisica Arq PDFLeonell Jardell IpanaqueBelum ada peringkat
- Equilibrio de cuerpos rígidos en 3DDokumen20 halamanEquilibrio de cuerpos rígidos en 3DAlexxander SanchezBelum ada peringkat
- Boletin de FiscaDokumen29 halamanBoletin de FiscaJavier Gustavo Chuco ChucoBelum ada peringkat
- Unidad 1 Estática Sem12021Dokumen7 halamanUnidad 1 Estática Sem12021miguelBelum ada peringkat
- CablesDokumen13 halamanCablesÁnikka Quevedo GarcíaBelum ada peringkat
- 2.4. Equilibrio de Una Partícula en El Plano y en El Espacio.Dokumen38 halaman2.4. Equilibrio de Una Partícula en El Plano y en El Espacio.Angel VargasBelum ada peringkat
- Antologia de Estatica La Chida PDFDokumen8 halamanAntologia de Estatica La Chida PDFdavid velazquezBelum ada peringkat
- Cap. 3 EquilibrioDokumen30 halamanCap. 3 Equilibrioquique33Belum ada peringkat
- 00053641166IM02S21098557EstaticayDinamica UA25Dokumen83 halaman00053641166IM02S21098557EstaticayDinamica UA25matiasquispe003Belum ada peringkat
- Ejercicios estática equilibrio fuerzasDokumen4 halamanEjercicios estática equilibrio fuerzasEDGAR ALEX RONALD DECENA SALINASBelum ada peringkat
- Electricidad JimenaDokumen3 halamanElectricidad JimenaAngel SalamancaBelum ada peringkat
- Electrostica DesarrolladDokumen8 halamanElectrostica DesarrolladManuelMYMMidoriBelum ada peringkat
- 494 StaticaDokumen7 halaman494 StaticaCésar Erwin Velásquez SuárezBelum ada peringkat
- Ejercicos Resueltos Fisica.Dokumen8 halamanEjercicos Resueltos Fisica.Diana Tomas AlvarezBelum ada peringkat
- ESTÁTICA - Capítulo 3.1 DCL y EquilibrioDokumen7 halamanESTÁTICA - Capítulo 3.1 DCL y EquilibrioCleverRamirezBelum ada peringkat
- 3.esfuerzo Por TemperaturaDokumen41 halaman3.esfuerzo Por TemperaturaJavier BL14Belum ada peringkat
- Taller HuanucoDokumen30 halamanTaller HuanucoKarla LudeñaBelum ada peringkat
- Hazen-Williams y Jacobi.Dokumen5 halamanHazen-Williams y Jacobi.Andielo Rober Pariona EscobarBelum ada peringkat
- Clase Semana 4Dokumen33 halamanClase Semana 4Oscar Adrian Chavez PanduroBelum ada peringkat
- Mec de FluidosDokumen38 halamanMec de FluidosGlin JBelum ada peringkat
- Segundo Informe - Mecanica de FluidosDokumen26 halamanSegundo Informe - Mecanica de FluidosOscar Adrian Chavez PanduroBelum ada peringkat
- Manual HydraccessDokumen34 halamanManual HydraccessJaimeTitoBelum ada peringkat
- Análisis granulométrico por hidrometríaDokumen1 halamanAnálisis granulométrico por hidrometríaOscar Adrian Chavez PanduroBelum ada peringkat
- PDRC Huánuco 2014 2021 FinalDokumen232 halamanPDRC Huánuco 2014 2021 FinalHenry Jean Cespedes HuatucoBelum ada peringkat
- Límites de Atterberg: SuelosDokumen16 halamanLímites de Atterberg: SuelosNoel Almanza CcoriBelum ada peringkat
- Moya Enrique Tes5hg2019.1Dokumen13 halamanMoya Enrique Tes5hg2019.1EdgarEnriqueMoyaPerezBelum ada peringkat
- Clasificación Estática de Las Estructuras SubrayadaDokumen9 halamanClasificación Estática de Las Estructuras Subrayadamiguel94_9Belum ada peringkat
- Materiales de Construccion - Tarea 04 - Oscar Adrian Chavez PanduroDokumen14 halamanMateriales de Construccion - Tarea 04 - Oscar Adrian Chavez PanduroOscar Adrian Chavez PanduroBelum ada peringkat
- Cálculo Estático de Una Estructura IsostáticaDokumen0 halamanCálculo Estático de Una Estructura IsostáticaJavier PalomoBelum ada peringkat
- 3 Insumos M 3 PDFDokumen2 halaman3 Insumos M 3 PDFOscar Adrian Chavez PanduroBelum ada peringkat
- Avance 01 - Impacto AmbientalDokumen21 halamanAvance 01 - Impacto AmbientalOscar Adrian Chavez PanduroBelum ada peringkat
- Moya Enrique Tes6hg2019.1Dokumen67 halamanMoya Enrique Tes6hg2019.1EdgarEnriqueMoyaPerezBelum ada peringkat
- 05 Terzaghi 3Dokumen20 halaman05 Terzaghi 3Victor MendozaBelum ada peringkat
- Seminario GeotecniaDokumen10 halamanSeminario GeotecniaOscar Adrian Chavez PanduroBelum ada peringkat
- Libro ESTATICA Problemas ResueltosDokumen220 halamanLibro ESTATICA Problemas ResueltosFelipe López Garduza78% (116)
- Practica N°02 - Mecanica de Fluidos - HidrostaticaDokumen12 halamanPractica N°02 - Mecanica de Fluidos - HidrostaticaOscar Adrian Chavez PanduroBelum ada peringkat
- Cinematica y Dinamica 16-17Dokumen7 halamanCinematica y Dinamica 16-17Yeny Benedetti RosalesBelum ada peringkat
- Libro ESTATICA Problemas ResueltosDokumen220 halamanLibro ESTATICA Problemas ResueltosFelipe López Garduza78% (116)
- Practica N°02 - Mecanica de Fluidos - HidrostaticaDokumen12 halamanPractica N°02 - Mecanica de Fluidos - HidrostaticaOscar Adrian Chavez PanduroBelum ada peringkat
- 05 Terzaghi 3Dokumen20 halaman05 Terzaghi 3Victor MendozaBelum ada peringkat
- Solucionario TAREA VIRTUAL-04Dokumen2 halamanSolucionario TAREA VIRTUAL-04Oscar Adrian Chavez PanduroBelum ada peringkat
- Mov Oscilatorio MAS Definición CaracterísticasDokumen40 halamanMov Oscilatorio MAS Definición CaracterísticasmanuellamoBelum ada peringkat
- Tema 8 Hidráulica BásicaDokumen30 halamanTema 8 Hidráulica BásicaKevinAliYdrogoPinedo100% (1)
- Trazado de Una CarreteraDokumen48 halamanTrazado de Una CarreteraOscar Adrian Chavez PanduroBelum ada peringkat
- Hid Rodin Am IcacDokumen17 halamanHid Rodin Am IcacAndreina ZambranoBelum ada peringkat
- Elasticidad: Conceptos y Leyes FundamentalesDokumen26 halamanElasticidad: Conceptos y Leyes FundamentalesBryan JohnsonBelum ada peringkat
- Materia: Carreteras I EXAMEN 1er. PARCIAL (87,5%) : 1. - (25%) Además de La Información Dada en La Figura, Se ConoceDokumen2 halamanMateria: Carreteras I EXAMEN 1er. PARCIAL (87,5%) : 1. - (25%) Además de La Información Dada en La Figura, Se ConoceTorres JhossephBelum ada peringkat
- Tabla Periodica e Instrumentos de LaboratorioDokumen10 halamanTabla Periodica e Instrumentos de Laboratoriomarlboro100% (1)
- Banqueo ECU Toyota 4EDokumen7 halamanBanqueo ECU Toyota 4ELuis TarquiBelum ada peringkat
- Laboratorio 5 - PoligonoDokumen6 halamanLaboratorio 5 - PoligonoRaul Cansaya LinaresBelum ada peringkat
- Manual de Ejecución de Mantenimiento Preventivo de Subestaciones EléctricasDokumen13 halamanManual de Ejecución de Mantenimiento Preventivo de Subestaciones EléctricasMiguel VilchezBelum ada peringkat
- Análisis de Objeto Técnico La EscaleraDokumen8 halamanAnálisis de Objeto Técnico La EscaleraIng. Gerardo Sánchez Nájera100% (2)
- Análisis granulométrico de suelosDokumen21 halamanAnálisis granulométrico de suelosEver Guzman BalcasBelum ada peringkat
- Ejercicios TermodinamicaDokumen5 halamanEjercicios TermodinamicaDavid NaviaBelum ada peringkat
- 1N4000 Data SheetDokumen3 halaman1N4000 Data SheetJ Andres Buchan ColinBelum ada peringkat
- Gestión de Envíos Internacionales: 202631278551906DJEN0125161VDokumen1 halamanGestión de Envíos Internacionales: 202631278551906DJEN0125161VJuan Manuel 'kani' CanaleBelum ada peringkat
- Problemas 2da LeyDokumen19 halamanProblemas 2da LeyJuan Carlos Chique Perez0% (1)
- Ropa de Proteccion para Bomberos INSHTDokumen2 halamanRopa de Proteccion para Bomberos INSHTAnonymous 9IrnCjQBelum ada peringkat
- Falla de Turbo 7.3Dokumen18 halamanFalla de Turbo 7.3Juan Alberto Bucaro100% (4)
- Actividad 7 EconomiaDokumen4 halamanActividad 7 EconomiaPaula CaceresBelum ada peringkat
- EJERCICIOS de GRANULOMETRIADokumen4 halamanEJERCICIOS de GRANULOMETRIAevelin espinoza mamaniBelum ada peringkat
- Generacion de HidrocarburosDokumen12 halamanGeneracion de HidrocarburosheydicruzBelum ada peringkat
- Touchpoint Plus Manual de UsuarioDokumen70 halamanTouchpoint Plus Manual de UsuarioEDWIN RICO VEGABelum ada peringkat
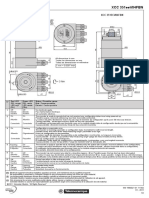
- EncoderDokumen2 halamanEncoderWlcc WlafBelum ada peringkat
- Informe de Laboratorio N°1 UPBDokumen5 halamanInforme de Laboratorio N°1 UPBpabloBelum ada peringkat
- 2022 Resueltos ParcialDokumen24 halaman2022 Resueltos ParcialSonia GautoBelum ada peringkat
- Manejo de MontacargasDokumen38 halamanManejo de MontacargasEnrique Rodriguez100% (3)
- Catalogo Gates Guia Rapida PesadoDokumen16 halamanCatalogo Gates Guia Rapida PesadoGuillermo CarrilloBelum ada peringkat
- 8 Estructura Adecuada Del ProductoDokumen17 halaman8 Estructura Adecuada Del ProductoAndrea De la OssaBelum ada peringkat
- Backus Trabajo BackusDokumen20 halamanBackus Trabajo BackusLesli GuerraBelum ada peringkat
- Instantáneas estancas mixtas Themaclassic F 24 EDokumen20 halamanInstantáneas estancas mixtas Themaclassic F 24 EManuel Fernandez MoraBelum ada peringkat
- 00.03 SeparadoresDokumen21 halaman00.03 SeparadoresEsaú VerásteguiBelum ada peringkat
- Diseño de Un Sistema Contraincendio en Una Planta Envasadora de GLPDokumen238 halamanDiseño de Un Sistema Contraincendio en Una Planta Envasadora de GLPJose GalloBelum ada peringkat
- Equipos de DestilacionDokumen4 halamanEquipos de DestilacionJulianAguilarFernandez100% (1)
- Lista de Precios Vta Cables Superiores Abr 23-2015Dokumen4 halamanLista de Precios Vta Cables Superiores Abr 23-2015bernardoBelum ada peringkat