Anda mungkin juga menyukai
- Neural and Fuzzy Logic Control of Drives and Power SystemsDari EverandNeural and Fuzzy Logic Control of Drives and Power SystemsBelum ada peringkat
- AU Ball On Plate Balancing Robot: December 2015Dokumen5 halamanAU Ball On Plate Balancing Robot: December 2015Nawara NawaraBelum ada peringkat
- 3D CT Option Manual (VG Version)Dokumen88 halaman3D CT Option Manual (VG Version)Carlos-alberto MartinezBelum ada peringkat
- Jengabot: Design Concept ProposalDokumen15 halamanJengabot: Design Concept ProposalfoolaiBelum ada peringkat
- PolyWorksPlug-in (I) SurphaserDokumen43 halamanPolyWorksPlug-in (I) SurphasertiborBelum ada peringkat
- Lab Sheet MEC522 PBL (ArduinoDC - MotorEncoder - Close Loop)Dokumen3 halamanLab Sheet MEC522 PBL (ArduinoDC - MotorEncoder - Close Loop)haikal zubirBelum ada peringkat
- Ultravim Application ManualDokumen157 halamanUltravim Application ManualmhafizanBelum ada peringkat
- Scope and Sequence Theory: Introduction To ComputersDokumen3 halamanScope and Sequence Theory: Introduction To Computerssuman chapagianBelum ada peringkat
- Chapter3 System ConfigurationDokumen15 halamanChapter3 System ConfigurationEngr Fahimuddin QureshiBelum ada peringkat
- Qbot LabDokumen43 halamanQbot Labbbb bbbBelum ada peringkat
- MEC522 PBL - ArduinoDC - MotorEncoder - Close LoopDokumen3 halamanMEC522 PBL - ArduinoDC - MotorEncoder - Close Loopzaiful hakimBelum ada peringkat
- Egstar3 0-Southab PDFDokumen92 halamanEgstar3 0-Southab PDFAli Zitouna HamedBelum ada peringkat
- Quick Operation Manual HX-CCD20Dokumen11 halamanQuick Operation Manual HX-CCD20Mafosk8Belum ada peringkat
- Stage Management Using The Stage ManagerDokumen23 halamanStage Management Using The Stage ManageremadhsobhyBelum ada peringkat
- 9 South AfDokumen8 halaman9 South AfAzizul KhanBelum ada peringkat
- Microcontroller Based Robotic Arm Control PrototypeDokumen17 halamanMicrocontroller Based Robotic Arm Control PrototypeJagadIsh JadhavBelum ada peringkat
- CTS-5500V Plus Operation ManualDokumen107 halamanCTS-5500V Plus Operation ManualMohammed SairawanBelum ada peringkat
- Amw-Mc04 Ag Eng V20091120Dokumen54 halamanAmw-Mc04 Ag Eng V20091120Mark Anthony AguinaldoBelum ada peringkat
- Ai Chess DocumentationDokumen33 halamanAi Chess DocumentationCrazyYT Gaming channelBelum ada peringkat
- Pixel Control System: For Traction Elevator ApplicationsDokumen154 halamanPixel Control System: For Traction Elevator ApplicationsDemetrio alejandro Vazquez amaroBelum ada peringkat
- MEC522 PBL ArduinoDC MotorEncoder Close LoopDokumen4 halamanMEC522 PBL ArduinoDC MotorEncoder Close LoopeimanBelum ada peringkat
- LaserCut61 Manual V1.0Dokumen64 halamanLaserCut61 Manual V1.0lologomez75Belum ada peringkat
- DNVR Digital Network Video Recorder : Before Using This System, Please Read The User Manual CarefullyDokumen37 halamanDNVR Digital Network Video Recorder : Before Using This System, Please Read The User Manual CarefullynoeldiechterBelum ada peringkat
- MCEN 4115-5115: Mechatronics and Robotics I: Team HodorDokumen21 halamanMCEN 4115-5115: Mechatronics and Robotics I: Team HodorRam KrishnanBelum ada peringkat
- Egstar Manual PDFDokumen90 halamanEgstar Manual PDFrufuelBelum ada peringkat
- 6 Series Mill Controller Operation Manual: 6 系列銑床操作手冊 Date: 2015/11/13Dokumen154 halaman6 Series Mill Controller Operation Manual: 6 系列銑床操作手冊 Date: 2015/11/13Alex DaltonBelum ada peringkat
- MoticEasyscan One - E - 1300901111091 - 22052018 - LowDokumen38 halamanMoticEasyscan One - E - 1300901111091 - 22052018 - LowGeovanni Alejandro Balderrama AranibarBelum ada peringkat
- MCEN 4115-5115: Mechatronics and Robotics I: Team HodorDokumen22 halamanMCEN 4115-5115: Mechatronics and Robotics I: Team HodorRam KrishnanBelum ada peringkat
- Leetro LaserCut 6.1 ManualDokumen60 halamanLeetro LaserCut 6.1 ManualNawres Arif0% (2)
- 2D23D Final Report Team B3Dokumen31 halaman2D23D Final Report Team B3Jeremy LeungBelum ada peringkat
- 009-0506 Vector Field Service Rev - BDokumen234 halaman009-0506 Vector Field Service Rev - BticojfsBelum ada peringkat
- LaserCut61 Manual V1.0Dokumen65 halamanLaserCut61 Manual V1.0Royman BernalBelum ada peringkat
- Ultravim Ultravim Ultravim Ultravim Application Application Application Application Manual Manual Manual ManualDokumen137 halamanUltravim Ultravim Ultravim Ultravim Application Application Application Application Manual Manual Manual ManualmhafizanBelum ada peringkat
- Industrial Training Project ReportDokumen36 halamanIndustrial Training Project ReportAYUSH SHARMABelum ada peringkat
- SeniorDesign2Report Group29Dokumen145 halamanSeniorDesign2Report Group29Ishali SandbhorBelum ada peringkat
- Sinowon 3D Video Measuring Machine VMM-P Operation ManualDokumen12 halamanSinowon 3D Video Measuring Machine VMM-P Operation ManualJohnny DaiBelum ada peringkat
- Real Time Systems Lab: Managing A Schedule With A Remote DeviceDokumen14 halamanReal Time Systems Lab: Managing A Schedule With A Remote DeviceJ robertsBelum ada peringkat
- Manual de Video Measuring SystemDokumen110 halamanManual de Video Measuring SystemJosé Rubén Ramos GarzaBelum ada peringkat
- Qms Manual (001-055)Dokumen55 halamanQms Manual (001-055)Định Thái ThànhBelum ada peringkat
- Contentonly-Đã M Khóa (001-060)Dokumen60 halamanContentonly-Đã M Khóa (001-060)Định Thái ThànhBelum ada peringkat
- EST3 System Operation ManualDokumen104 halamanEST3 System Operation Manualsundar giscoBelum ada peringkat
- Gps Tracking SystemDokumen39 halamanGps Tracking Systemdeepak_143Belum ada peringkat
- CMS User Manual PDFDokumen63 halamanCMS User Manual PDFbotaxajaBelum ada peringkat
- B10 Mini Project Final 2Dokumen82 halamanB10 Mini Project Final 218E3457 MukundiniBelum ada peringkat
- LAB 1 ArduinoDokumen11 halamanLAB 1 ArduinoShaikhan NadzemiBelum ada peringkat
- LAB 1 ArduinoDokumen11 halamanLAB 1 ArduinoShaikhan NadzemiBelum ada peringkat
- Proyecto ImagenDokumen84 halamanProyecto ImagenATILA SRLBelum ada peringkat
- Stand - Alone Day - Night Gunner's Sight Dnns - 1 Ai: Operating ManualDokumen12 halamanStand - Alone Day - Night Gunner's Sight Dnns - 1 Ai: Operating ManualLatwPIATBelum ada peringkat
- Realization of A Multi Station Supervisory System With Software RedundancyDokumen85 halamanRealization of A Multi Station Supervisory System With Software RedundancySofiane Khe LifiBelum ada peringkat
- IRVision 3DL Operator Manual (A-86994EN01) (Preliminary)Dokumen146 halamanIRVision 3DL Operator Manual (A-86994EN01) (Preliminary)Raphael Gomes RodriguesBelum ada peringkat
- Speech Controlled RC Car: Imran HafeezDokumen45 halamanSpeech Controlled RC Car: Imran HafeezEndalew kassahunBelum ada peringkat
- 129768-01 Rev D 3500 20 Rack Interface Module Operation and Maintenance ManualDokumen59 halaman129768-01 Rev D 3500 20 Rack Interface Module Operation and Maintenance ManualEmad Alhosen100% (1)
- Mol Imager 2 PDFDokumen37 halamanMol Imager 2 PDFFederico GiannoniBelum ada peringkat
- Manual Control Electronico - SpraylightDokumen60 halamanManual Control Electronico - SpraylighttallervtBelum ada peringkat
- UCCNC Software Installation and User's GuideDokumen82 halamanUCCNC Software Installation and User's GuideManuel RamírezBelum ada peringkat
- ReportDokumen55 halamanReportYogesh SahayBelum ada peringkat
- Lab Report Control IDokumen19 halamanLab Report Control Iridzwan abuBelum ada peringkat
- Settings, Configuration & Instruments Guide: Recloser-M Controller 7SR224Dokumen23 halamanSettings, Configuration & Instruments Guide: Recloser-M Controller 7SR224tunghtdBelum ada peringkat
- Autonomous Hovering of A Vision/IMU Guided QuadrotorDokumen6 halamanAutonomous Hovering of A Vision/IMU Guided QuadrotorKok Kai YitBelum ada peringkat
- Balancing of Two PDFDokumen67 halamanBalancing of Two PDFرشيد بن صغيرBelum ada peringkat
- Iv2906 Iveco Ad380t42h 6x4Dokumen2 halamanIv2906 Iveco Ad380t42h 6x4أبو خالد الأثرىBelum ada peringkat
- K.analysis of The Articulated Robotic Arm (TITLE DEFENCE)Dokumen22 halamanK.analysis of The Articulated Robotic Arm (TITLE DEFENCE)sky4sterBelum ada peringkat
- Industrial Engineering - Paradoxical Twins - Acme and Omega ElectronicsDokumen2 halamanIndustrial Engineering - Paradoxical Twins - Acme and Omega Electronicslollypop0606Belum ada peringkat
- Kolar-Chikkaballapur Milk Union Limited: First Prize DairyDokumen8 halamanKolar-Chikkaballapur Milk Union Limited: First Prize DairySundaram Ramalingam GopinathBelum ada peringkat
- The Flow Chart of Tires Pyrolysis EquipmentDokumen4 halamanThe Flow Chart of Tires Pyrolysis EquipmentpyrolysisoilBelum ada peringkat
- Const Estimate Made EasyDokumen31 halamanConst Estimate Made EasyLorenzo SerranoBelum ada peringkat
- Fourier Series - MATLAB & Simulink PDFDokumen7 halamanFourier Series - MATLAB & Simulink PDFWanderson Antonio Sousa SilvaBelum ada peringkat
- Manual Multisim 2001 (Ingles)Dokumen72 halamanManual Multisim 2001 (Ingles)Anonymous W1QQcbA4sWBelum ada peringkat
- Knowledge Based SystemsDokumen57 halamanKnowledge Based SystemsRodel MoralesBelum ada peringkat
- Cat Reforming Part 2 3 PDF FreeDokumen68 halamanCat Reforming Part 2 3 PDF FreeLê Trường AnBelum ada peringkat
- Implifier PanssonicDokumen5 halamanImplifier PanssonicSergs LluismaBelum ada peringkat
- TS2015 Quick Start Guide PDFDokumen7 halamanTS2015 Quick Start Guide PDFAbel Otero RamírezBelum ada peringkat
- Astm D 2699 - 01 - Rdi2otktmdeDokumen49 halamanAstm D 2699 - 01 - Rdi2otktmdeSamuel EduardoBelum ada peringkat
- CH 4Dokumen34 halamanCH 4saadkhalisBelum ada peringkat
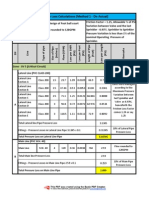
- Friction Loss Calculations of Irrigation Design A Foot Ball CourtDokumen13 halamanFriction Loss Calculations of Irrigation Design A Foot Ball Courtmathewmanjooran100% (2)
- Extra - Exercises Unistall InformixDokumen14 halamanExtra - Exercises Unistall InformixМихаи БонцалоBelum ada peringkat
- Empaque Espirometalicos PDFDokumen50 halamanEmpaque Espirometalicos PDFgregorioBelum ada peringkat
- InsulinDokumen6 halamanInsulinJorelle-Nickolai RodriguezBelum ada peringkat
- Wrights Offshore Hydrate Remediation Skid ArticleDokumen4 halamanWrights Offshore Hydrate Remediation Skid ArticleAnonymous ItzBhUGoiBelum ada peringkat
- Wind Loads - IS 875 - Where Does Our Code of Practice StandDokumen11 halamanWind Loads - IS 875 - Where Does Our Code of Practice StandRavi Kiran NandyalaBelum ada peringkat
- Westfalia Cycle CarrierDokumen20 halamanWestfalia Cycle CarrierBarry John FitzGeradBelum ada peringkat
- A Cylindrical Shadow Eclipse Prediction Model For LEO Satellites With Application To IRS SatellitesDokumen14 halamanA Cylindrical Shadow Eclipse Prediction Model For LEO Satellites With Application To IRS SatellitesAsia Pacific Journal of Engineering Science and TechnologyBelum ada peringkat
- Esc101: Fundamentals of Computing: 2011-12-Monsoon SemesterDokumen6 halamanEsc101: Fundamentals of Computing: 2011-12-Monsoon SemesterMukesh Kumar DewraBelum ada peringkat
- 350W AmplifierDokumen5 halaman350W AmplifiermoisesBelum ada peringkat
- ASSAM - Uniform Zoning Regulation 2000Dokumen35 halamanASSAM - Uniform Zoning Regulation 2000rajatesh1Belum ada peringkat
- Kroo Subsonic WingDokumen8 halamanKroo Subsonic WingRod ManserBelum ada peringkat
- DP Misc Wnt5 x86-32 ChangelogDokumen5 halamanDP Misc Wnt5 x86-32 ChangelogBrandal KalocyBelum ada peringkat
- Pompa WarmanDokumen2 halamanPompa WarmanRahmad Saleh SiregarBelum ada peringkat
- DMPCDokumen49 halamanDMPCiprassandyBelum ada peringkat
- B766Dokumen9 halamanB766marriolavBelum ada peringkat