Anda mungkin juga menyukai
- Diode Datasheet 1N SeriesDokumen1 halamanDiode Datasheet 1N SerieskarkeraBelum ada peringkat
- QSK19 CM850 MCRS Wiring DiagramDokumen11 halamanQSK19 CM850 MCRS Wiring DiagramMussardBelum ada peringkat
- Aj Power Ats Panels Handbook-En-rev3Dokumen44 halamanAj Power Ats Panels Handbook-En-rev3Fernando QuisberthBelum ada peringkat
- How Voltage Doublers WorkDokumen2 halamanHow Voltage Doublers WorkErole Technologies Pvt ltd Homemade EngineerBelum ada peringkat
- Voltage Doubler: Navigation Search AC DC Voltage Multiplier Diodes CapacitorsDokumen10 halamanVoltage Doubler: Navigation Search AC DC Voltage Multiplier Diodes CapacitorsReyne Col-iteng Reyl100% (1)
- Eixo Transmissao e Polia Conjunto 84MM (Wynn Marine PN 1588-009-117) PDFDokumen44 halamanEixo Transmissao e Polia Conjunto 84MM (Wynn Marine PN 1588-009-117) PDFAugusto RezendeBelum ada peringkat
- Bosch Sensor PDFDokumen14 halamanBosch Sensor PDFgabrielportres100% (1)
- Conexiones Dahlander PDFDokumen1 halamanConexiones Dahlander PDFPedroPicapiedraHeyheyBelum ada peringkat
- Course "EEM 42 Three-Phase Asynchronous Machines: Dahlander Motors"Dokumen38 halamanCourse "EEM 42 Three-Phase Asynchronous Machines: Dahlander Motors"Daus VillaBelum ada peringkat
- lm386 PDFDokumen11 halamanlm386 PDFNicolás MoraBelum ada peringkat
- Course "EEM 2 DC Machines": WWW - Lucas-Nuelle - deDokumen17 halamanCourse "EEM 2 DC Machines": WWW - Lucas-Nuelle - desifuszBelum ada peringkat
- Stator Winding Induction Motor in The EMTPDokumen8 halamanStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaBelum ada peringkat
- Dahlander PoleDokumen4 halamanDahlander PoleNur Mirza Kholili SBelum ada peringkat
- Protection of Synchronous GeneratorsDokumen117 halamanProtection of Synchronous GeneratorsprotectionworkBelum ada peringkat
- EEM 2 DC Machines PDFDokumen106 halamanEEM 2 DC Machines PDFIonescu Viorel100% (3)
- Cogging Torque MeasurementDokumen3 halamanCogging Torque MeasurementIon TrifuBelum ada peringkat
- Saudi Aramco Motor Protection StandardsDokumen84 halamanSaudi Aramco Motor Protection StandardsJellyn Base100% (1)
- 03 - ACS 5000AD TC SW Commissioning Manual PDFDokumen76 halaman03 - ACS 5000AD TC SW Commissioning Manual PDFserkalemtBelum ada peringkat
- Electric MotorDokumen20 halamanElectric MotorthisisjineshBelum ada peringkat
- ABB Synchronous MotorsDokumen20 halamanABB Synchronous Motorsidontlikeebooks0% (1)
- EEM 42 Three Phase Asynchr Machines Dahlander MotorDokumen38 halamanEEM 42 Three Phase Asynchr Machines Dahlander MotorZoneoTakan Berpling DrimhuBelum ada peringkat
- Prospect NORDEX N54Dokumen2 halamanProspect NORDEX N54Станимир МихалевBelum ada peringkat
- InfiniSolar V 1KW 5KW User ManualDokumen30 halamanInfiniSolar V 1KW 5KW User Manualjohncua100% (1)
- Lab MachineDokumen9 halamanLab MachineAnonymous ryvoPIDBelum ada peringkat
- DCA-25ESK: DenyoDokumen1 halamanDCA-25ESK: DenyoAdeelBelum ada peringkat
- DD100 5 PI Installation ManualDokumen8 halamanDD100 5 PI Installation Manualprala_marian5780Belum ada peringkat
- Digital Multimeter User ManualDokumen83 halamanDigital Multimeter User ManualJoseEliasBelum ada peringkat
- GX 600 AVRDokumen10 halamanGX 600 AVRKatherine Isahac Blue LaceBelum ada peringkat
- Part Winding Motor PDFDokumen4 halamanPart Winding Motor PDFBj Valdez100% (2)
- Slip Power Recovery SchemeDokumen19 halamanSlip Power Recovery SchemeISL EEE HODBelum ada peringkat
- Excel ApodysDokumen4 halamanExcel ApodysjeremiahBelum ada peringkat
- General: Technical Data TAD722GEDokumen8 halamanGeneral: Technical Data TAD722GEbaljeetjatBelum ada peringkat
- 056-022 Switchgear ControlDokumen4 halaman056-022 Switchgear ControlSon Do100% (1)
- CET Power - Agil Modular UPS - User Manual - v7.2Dokumen61 halamanCET Power - Agil Modular UPS - User Manual - v7.2Renzo Velarde100% (1)
- Test and diagnose Bosch VE EDC diesel pump actuator faultsDokumen1 halamanTest and diagnose Bosch VE EDC diesel pump actuator faultsCharaf-eddine RamehBelum ada peringkat
- Carregador CCL Sentinel 150Dokumen8 halamanCarregador CCL Sentinel 150José Da Silva MataBelum ada peringkat
- Hitachi P50H401 Service ManualDokumen139 halamanHitachi P50H401 Service ManualMoto0524Belum ada peringkat
- GEP80SP4Dokumen4 halamanGEP80SP4Javier Ramírez VeraBelum ada peringkat
- Catalog CQ Part2 PDFDokumen328 halamanCatalog CQ Part2 PDFTan JaiBelum ada peringkat
- Proportional Amplifier PVRDokumen8 halamanProportional Amplifier PVRgaliardiBelum ada peringkat
- ESD5500E Series Speed Control Unit: SpecificationsDokumen5 halamanESD5500E Series Speed Control Unit: SpecificationsMurilo FigueiredoBelum ada peringkat
- Dynamics of Machinary - Question BANKDokumen17 halamanDynamics of Machinary - Question BANKS A ABDUL SUKKURBelum ada peringkat
- NV10Dokumen39 halamanNV10Marian BaciuBelum ada peringkat
- 12V To 24V DC DC ConverterDokumen4 halaman12V To 24V DC DC ConverterDavid Arrata ParralesBelum ada peringkat
- Simover CDokumen12 halamanSimover CTomuta StefanBelum ada peringkat
- Universal 16 Amp Self Excited Automatic Voltage Regulator ManualDokumen9 halamanUniversal 16 Amp Self Excited Automatic Voltage Regulator ManualJuan José Tovar Pérez100% (1)
- Generator Excitation Control Systems & MethodsDokumen5 halamanGenerator Excitation Control Systems & MethodsJohan GantivaBelum ada peringkat
- Versatile Three-Phase CT/VT Meter for LV, MV & HV ApplicationsDokumen2 halamanVersatile Three-Phase CT/VT Meter for LV, MV & HV ApplicationsMohammed Nafis N100% (2)
- AutoCAD Electrical User's Guide - Time Delay RelaysDokumen3 halamanAutoCAD Electrical User's Guide - Time Delay RelaysKiliardt ScmidtBelum ada peringkat
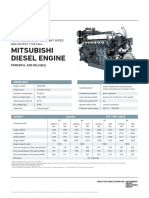
- Mitsubishi Diesel Engine - S16R-PTADokumen2 halamanMitsubishi Diesel Engine - S16R-PTAfendynovapamelaBelum ada peringkat
- Ev Course ContentDokumen3 halamanEv Course ContentSwamy NallabelliBelum ada peringkat
- Stepper Motor Control Using 8051Dokumen7 halamanStepper Motor Control Using 8051hksaifee100% (1)
- EPM72 Engine Protection ModuleDokumen8 halamanEPM72 Engine Protection Moduleandy habibiBelum ada peringkat
- Various Generator and Genset ModelsDokumen51 halamanVarious Generator and Genset ModelsYarisSyahmidanBelum ada peringkat
- DC Motor Control Circuit Using NE555 and Direction ControlDokumen2 halamanDC Motor Control Circuit Using NE555 and Direction ControlAamirniazBelum ada peringkat
- Entrelec Single Function Timers PDFDokumen105 halamanEntrelec Single Function Timers PDFembasianBelum ada peringkat
- IGS-NT 4.0.0 New Features PDFDokumen23 halamanIGS-NT 4.0.0 New Features PDFPatricio CarpioBelum ada peringkat
- Series IV MKII Rigid Hauler Tractors Broch18281215 EnglishWebDokumen20 halamanSeries IV MKII Rigid Hauler Tractors Broch18281215 EnglishWebAlejandro QuiñonezBelum ada peringkat
- 10KVA - 60KVA ETSB Off Grid ETS Series Tech ManualDokumen48 halaman10KVA - 60KVA ETSB Off Grid ETS Series Tech ManualPsc Solar100% (1)
- 2 Brake Test On DC Shunt MotorDokumen12 halaman2 Brake Test On DC Shunt MotorMahesh Patil100% (1)
- Polo No. 31 / 1: Current Flow DiagramDokumen11 halamanPolo No. 31 / 1: Current Flow DiagramIgnacio Rifo NochezBelum ada peringkat
- 3 Phase Asyn. MachineDokumen74 halaman3 Phase Asyn. Machineabdul shaggyBelum ada peringkat
- Mutimachines PDFDokumen104 halamanMutimachines PDFabdul shaggyBelum ada peringkat
- Curso de Maquina AsincronaDokumen64 halamanCurso de Maquina AsincronaCcoris JMBelum ada peringkat
- EEM 2 DC MachinesDokumen106 halamanEEM 2 DC MachinesAbrar Smektwo50% (2)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsDari EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsBelum ada peringkat
- 2013 Rawlemon Flyer NYC PDFDokumen7 halaman2013 Rawlemon Flyer NYC PDFRuth Velasquez QuirozBelum ada peringkat
- March April2017Dokumen12 halamanMarch April2017Ruth Velasquez QuirozBelum ada peringkat
- S55en RelayDokumen16 halamanS55en RelayABDUL GHAFOORBelum ada peringkat
- Ieee 112 2004 PDFDokumen89 halamanIeee 112 2004 PDFRuth Velasquez QuirozBelum ada peringkat
- Cara Setting Inverter FR A800 PDFDokumen100 halamanCara Setting Inverter FR A800 PDFAlanaBelum ada peringkat
- Altivar Process ATV600 - ATV660SYSTEMDokumen4 halamanAltivar Process ATV600 - ATV660SYSTEMAmirudin HTMBelum ada peringkat
- D C Circuit Analysis and Network TheoremsDokumen2 halamanD C Circuit Analysis and Network TheoremsVijayChaudhariBelum ada peringkat
- SN 35068 2Dokumen3 halamanSN 35068 2Lin LinBelum ada peringkat
- JADEN-DLF1 Manual PDFDokumen218 halamanJADEN-DLF1 Manual PDFChanarop VichalaiBelum ada peringkat
- Application ModrobDokumen6 halamanApplication Modrobharimadhavareddy80% (10)
- Quick Startup Guide For Simovert Masterdrives 6SE70 VC Vector ControlDokumen57 halamanQuick Startup Guide For Simovert Masterdrives 6SE70 VC Vector ControlcassioBelum ada peringkat
- Ain Shams University Faculty of Engineering Chep Energy SeniorDokumen12 halamanAin Shams University Faculty of Engineering Chep Energy Seniorbanana_26Belum ada peringkat
- Comparing Slip Ring Motors With Standard Ac MotorsDokumen4 halamanComparing Slip Ring Motors With Standard Ac MotorsFrançois SteinmetzBelum ada peringkat
- Synchronous Generators NotesDokumen4 halamanSynchronous Generators NotesGladiatoR XDBelum ada peringkat
- Doubly Fed Induction Generator For Wind TurbinesDokumen21 halamanDoubly Fed Induction Generator For Wind TurbinesAdarsh KailashBelum ada peringkat
- Mech Syllabus 2013 14Dokumen126 halamanMech Syllabus 2013 14netraBelum ada peringkat
- GATE 2014: General Instructions During Examination: Common Data Button That Appears On The ScreenDokumen49 halamanGATE 2014: General Instructions During Examination: Common Data Button That Appears On The ScreenJyotsanaTrivediBelum ada peringkat
- Double Sided Linear Induction Motor Hyperloop (Main Reference)Dokumen4 halamanDouble Sided Linear Induction Motor Hyperloop (Main Reference)Dibyarupa JenaBelum ada peringkat
- Schaums Outline of English Grammar PDFDokumen53 halamanSchaums Outline of English Grammar PDFraymond baliteBelum ada peringkat
- USCG ME Exam - Electrical KnowledgeDokumen104 halamanUSCG ME Exam - Electrical Knowledgelazyreaderr100% (2)
- Field Oriented Control Scheme For Linear Induction Motor With The End EffectDokumen8 halamanField Oriented Control Scheme For Linear Induction Motor With The End Effectramin87Belum ada peringkat
- Samplepractice Exam 15 March Questions and Answers PDFDokumen224 halamanSamplepractice Exam 15 March Questions and Answers PDFsam labineBelum ada peringkat
- Mrsptu B.tech. (Me) 1st Year (Sem 1-2) Syllabus 2019 Batch Onwards Updated On 23.09.2019Dokumen20 halamanMrsptu B.tech. (Me) 1st Year (Sem 1-2) Syllabus 2019 Batch Onwards Updated On 23.09.2019Prabhawati DeviBelum ada peringkat
- Leroy SomerDokumen86 halamanLeroy SomerSimón Klein100% (1)
- Speed Control of Three Phase Induction MotorDokumen8 halamanSpeed Control of Three Phase Induction MotorsasBelum ada peringkat
- 4 Starting-Characterstics-of-AC-and-DC-Motors (1) PRESENTATIONDokumen14 halaman4 Starting-Characterstics-of-AC-and-DC-Motors (1) PRESENTATIONEloisa FabroaBelum ada peringkat
- MG 1 Part 12 WATERMARKDokumen64 halamanMG 1 Part 12 WATERMARKNhanBelum ada peringkat
- Power Electronics Lab Experiments GuideDokumen11 halamanPower Electronics Lab Experiments GuideAbhishek VermaBelum ada peringkat