Anda mungkin juga menyukai
- Fluid Dynamics - Dual Solution of Nonlinear Ordinary Differential Equations - Mathematica Stack Exchange 1Dokumen1 halamanFluid Dynamics - Dual Solution of Nonlinear Ordinary Differential Equations - Mathematica Stack Exchange 1vknarlaBelum ada peringkat
- Heat Transfer in Electroosmotic Flow of Power-Law Fluids in Micro-ChannelDokumen2 halamanHeat Transfer in Electroosmotic Flow of Power-Law Fluids in Micro-ChannelvknarlaBelum ada peringkat
- Unit 3 Legendre, Hermite and Laguerre Polynomials: Structure Page NoDokumen38 halamanUnit 3 Legendre, Hermite and Laguerre Polynomials: Structure Page NoJAGANNATH PRASADBelum ada peringkat
- Unit 4 Bessel Functions: Structure Page NoDokumen30 halamanUnit 4 Bessel Functions: Structure Page NoJAGANNATH PRASADBelum ada peringkat
- AuNP Applications Peristalsis PDFDokumen14 halamanAuNP Applications Peristalsis PDFvknarlaBelum ada peringkat
- Solving Differential Equations Using Bessel FunctionsDokumen102 halamanSolving Differential Equations Using Bessel FunctionsvknarlaBelum ada peringkat
- Dimensionless Numbers in Heat TransferDokumen6 halamanDimensionless Numbers in Heat TransfervknarlaBelum ada peringkat
- Biological Applications of Ferroelectric MaterialsDokumen20 halamanBiological Applications of Ferroelectric MaterialsvknarlaBelum ada peringkat
- Mathematical Sciences Study Material 1 PDFDokumen12 halamanMathematical Sciences Study Material 1 PDFvknarlaBelum ada peringkat
- Tutorial and Assignment-IIDokumen2 halamanTutorial and Assignment-IIvknarlaBelum ada peringkat
- Csir Net June 2015 Mathematical Sciences Booklet CDokumen20 halamanCsir Net June 2015 Mathematical Sciences Booklet CvknarlaBelum ada peringkat
- Csir Ugc Net Math June 2014 PDFDokumen19 halamanCsir Ugc Net Math June 2014 PDFakeey4uBelum ada peringkat
- Sets and FunctionsDokumen3 halamanSets and FunctionsvknarlaBelum ada peringkat
- Linear Algebra: Debashish Sharma June 5, 2014Dokumen7 halamanLinear Algebra: Debashish Sharma June 5, 2014vknarlaBelum ada peringkat
- C Opyright 1985 Springer-Verlag. All Rights ReservedDokumen2 halamanC Opyright 1985 Springer-Verlag. All Rights ReservedvknarlaBelum ada peringkat
- Application FormDokumen10 halamanApplication FormvknarlaBelum ada peringkat
- Sets and FunctionsDokumen3 halamanSets and FunctionsvknarlaBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- AMICO InstallationManual PDFDokumen60 halamanAMICO InstallationManual PDFfernandoBelum ada peringkat
- EnglishDokumen6 halamanEnglishThineswary Siva naiduBelum ada peringkat
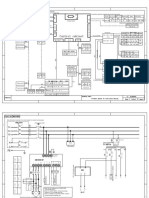
- Wire Diagram Complete Elevator - SL ELEVATOR 20190805Dokumen23 halamanWire Diagram Complete Elevator - SL ELEVATOR 20190805Eka Rama100% (2)
- Hepworth Clay DoPs - Full SetDokumen54 halamanHepworth Clay DoPs - Full SetAnonymous XYAPaxjbYBelum ada peringkat
- Patentes 2012Dokumen33 halamanPatentes 2012Carlín CastromanBelum ada peringkat
- Harbor GlenDokumen31 halamanHarbor GlenElvis Felix fernandesBelum ada peringkat
- Medium Voltage MZDokumen86 halamanMedium Voltage MZsujiBelum ada peringkat
- WAXESDokumen2 halamanWAXESPra YogaBelum ada peringkat
- Repair Kit Hitachi PlasmaDokumen4 halamanRepair Kit Hitachi Plasmacolman123456789100% (1)
- MSM Carbon FibreDokumen35 halamanMSM Carbon FibrelokeshkrkushwahaBelum ada peringkat
- PDS HEMPATEX ENAMEL 56360 en-GB PDFDokumen2 halamanPDS HEMPATEX ENAMEL 56360 en-GB PDFMohamed ChelfatBelum ada peringkat
- Pso MPPTDokumen10 halamanPso MPPTDileep GBelum ada peringkat
- Roofing SafetyDokumen38 halamanRoofing SafetyDhârâñî KûmârBelum ada peringkat
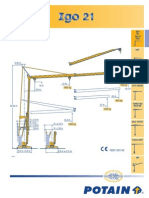
- Potain Igo 21 PDFDokumen4 halamanPotain Igo 21 PDFMarco CruzBelum ada peringkat
- Nirma University Institute of Technology B.Tech. in Mechanical Engineering Semester IVDokumen2 halamanNirma University Institute of Technology B.Tech. in Mechanical Engineering Semester IVKartik aminBelum ada peringkat
- Oracle E-Business Suite Release 11 Discoverer & XML PublisherDokumen32 halamanOracle E-Business Suite Release 11 Discoverer & XML PublisherVijay KishanBelum ada peringkat
- YesDokumen80 halamanYesRonnie TorresBelum ada peringkat
- Chip Scale Atomic Magnetometer Based On SERFDokumen4 halamanChip Scale Atomic Magnetometer Based On SERFluckystar83100% (2)
- Dji Phantom 4 RTK Book F-2Dokumen18 halamanDji Phantom 4 RTK Book F-2Liu Purnomo100% (1)
- Curriculam Vitae: ObjectiveDokumen4 halamanCurriculam Vitae: ObjectiveSachin DeoBelum ada peringkat
- A320 Documentation (1 CMP) PDFDokumen198 halamanA320 Documentation (1 CMP) PDFRamakrishnan AmbiSubbiah75% (4)
- Centum VPDokumen101 halamanCentum VPgopalBelum ada peringkat
- BoyapatyDokumen5 halamanBoyapatylalalallalalaaluuuBelum ada peringkat
- Seetha ResumeDokumen2 halamanSeetha Resumeseetha525Belum ada peringkat
- EEC 319 Engineer in The Society DocumentDokumen3 halamanEEC 319 Engineer in The Society Documentgodspower odior100% (1)
- (GUNSMITHING) The .22 PistolDokumen18 halaman(GUNSMITHING) The .22 PistolMago Invisivel88% (25)
- MRT PrjectDokumen59 halamanMRT PrjectFahrul 2394Belum ada peringkat
- GAPS Guidelines: Deep Fat FryersDokumen4 halamanGAPS Guidelines: Deep Fat FryersAsad KhanBelum ada peringkat
- Refrigerator: Service ManualDokumen44 halamanRefrigerator: Service ManualBetileno QuadAlexBelum ada peringkat
- Upload Photosimages Into Custom Table & Print in Adobe FormDokumen14 halamanUpload Photosimages Into Custom Table & Print in Adobe FormEmilSBelum ada peringkat