Anda mungkin juga menyukai
- Maximization of Power For Wind Energy ProductionDokumen6 halamanMaximization of Power For Wind Energy ProductionInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Question 5 PDFDokumen12 halamanQuestion 5 PDFiee03303o3p993Manikandan RajendranBelum ada peringkat
- Sliding Mode Control Strategy For Variable Speed Wind TurbineDokumen5 halamanSliding Mode Control Strategy For Variable Speed Wind TurbineDuyên Nguyễn NgọcBelum ada peringkat
- Behaviour of Wind Turbine Under Different Operating Modes: Navjot Singh Sandhu Saurabh ChananaDokumen5 halamanBehaviour of Wind Turbine Under Different Operating Modes: Navjot Singh Sandhu Saurabh ChananaABDULRAHIMAN RAJEKHANBelum ada peringkat
- Simulation of DFIG Wind Turbines Ride Through CapabilityDokumen9 halamanSimulation of DFIG Wind Turbines Ride Through CapabilityDanny LiBelum ada peringkat
- Wind Turbine Emulator With DC MotorDokumen6 halamanWind Turbine Emulator With DC MotormatiastielliBelum ada peringkat
- Modeling of Wind Energy System With MPPTDokumen6 halamanModeling of Wind Energy System With MPPTsbv1986Belum ada peringkat
- Automatically Regulated C.V.T. in Wind PDFDokumen12 halamanAutomatically Regulated C.V.T. in Wind PDFمهيمن فالح حمدBelum ada peringkat
- Wind Energy ConversionDokumen50 halamanWind Energy ConversionPawan Sharma0% (1)
- Wind Turbine Emulator Laboratory SetupDokumen5 halamanWind Turbine Emulator Laboratory Setupbalaji mendiBelum ada peringkat
- A Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleDokumen6 halamanA Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleKhiem NguyenBelum ada peringkat
- Speed Control OF WIND TURBINEDokumen4 halamanSpeed Control OF WIND TURBINESHADDOWWBelum ada peringkat
- Continuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDokumen17 halamanContinuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDork654651Belum ada peringkat
- Control of A PMSG Based Wind Energy Generation System For Power Maximization and Grid Fault ConditionsDokumen10 halamanControl of A PMSG Based Wind Energy Generation System For Power Maximization and Grid Fault ConditionsHieu VuBelum ada peringkat
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDokumen6 halamanPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71Belum ada peringkat
- Mathematical Modelling of Wind Turbine in A Wind Energy Conversion System: Power Coe Cient AnalysisDokumen10 halamanMathematical Modelling of Wind Turbine in A Wind Energy Conversion System: Power Coe Cient AnalysisJose Antonio GdBelum ada peringkat
- 5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsDokumen11 halaman5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsnguyenngocbanBelum ada peringkat
- 1 s2.0 S0045790608000906 MainDokumen14 halaman1 s2.0 S0045790608000906 MainKaderBelum ada peringkat
- Aschemann - Decentralised Control of HST Wind Turbine PDFDokumen6 halamanAschemann - Decentralised Control of HST Wind Turbine PDFwilliamBelum ada peringkat
- A Meriem2017Dokumen6 halamanA Meriem2017hamza mesaiBelum ada peringkat
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDokumen6 halamanJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbBelum ada peringkat
- Wind EnergyDokumen8 halamanWind EnergyValenitnBelum ada peringkat
- Wind ExamDokumen8 halamanWind ExamwaltikraBelum ada peringkat
- Math Model of DFIG PDFDokumen10 halamanMath Model of DFIG PDFFiaz AhmadBelum ada peringkat
- One-point control for variable speed wind turbinesDokumen10 halamanOne-point control for variable speed wind turbinesHuibin ZhangBelum ada peringkat
- Harrouz2014 PDFDokumen4 halamanHarrouz2014 PDFrahouaBelum ada peringkat
- SMC pitch control for variable speed wind turbine considering actuator dynamicsDokumen5 halamanSMC pitch control for variable speed wind turbine considering actuator dynamicsDuyên Nguyễn NgọcBelum ada peringkat
- Dynamic Modeling of Wind Power Generation: H Ector A. Pulgar-Painemal and Peter W. SauerDokumen6 halamanDynamic Modeling of Wind Power Generation: H Ector A. Pulgar-Painemal and Peter W. SauerkfaliBelum ada peringkat
- Group 20 EEE 2K16Dokumen37 halamanGroup 20 EEE 2K16MIGHTY RAJUBelum ada peringkat
- Sgre 2013061413565326 PDFDokumen7 halamanSgre 2013061413565326 PDFAnonymous zzfx7mz3Belum ada peringkat
- Sliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionDokumen13 halamanSliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionelecnaimelecBelum ada peringkat
- A Globally Convergent Wind Speed Estimator For Wind Turbine SystemsDokumen13 halamanA Globally Convergent Wind Speed Estimator For Wind Turbine SystemsAnonymous XKlkx7cr2IBelum ada peringkat
- Methods For Increasing Region 2 Power CaDokumen11 halamanMethods For Increasing Region 2 Power Cavorge daoBelum ada peringkat
- Ieee 5Dokumen10 halamanIeee 5Thiaga RajanBelum ada peringkat
- To Improve Efficiency of Prototype Vawt Test Setup Using VFDDokumen12 halamanTo Improve Efficiency of Prototype Vawt Test Setup Using VFDUsername4653Belum ada peringkat
- To Improve Efficiency of Prototype Vawt Test Setup Using VFDDokumen12 halamanTo Improve Efficiency of Prototype Vawt Test Setup Using VFDUsername4653Belum ada peringkat
- RDokumen8 halamanRhamza gaBelum ada peringkat
- Power and Energy Analysis of Commercial Small Wind Turbine SystemsDokumen6 halamanPower and Energy Analysis of Commercial Small Wind Turbine SystemsKamal DrawilBelum ada peringkat
- s2141627 Ow REPORT Group 20Dokumen23 halamans2141627 Ow REPORT Group 20YEE SENG OWBelum ada peringkat
- Priyanshu Thesis (1) FinalDokumen22 halamanPriyanshu Thesis (1) Finaliphone14cherishBelum ada peringkat
- 1 s2.0 S1876610213012162 MainDokumen11 halaman1 s2.0 S1876610213012162 MainMohamed AlBelum ada peringkat
- Modeling and Design of Control System For Variable Speed Wind Turbine in All Operating RegionDokumen7 halamanModeling and Design of Control System For Variable Speed Wind Turbine in All Operating RegionAbdul RafayBelum ada peringkat
- Variable Speed Drive Modelling of Wind Turbine Permanent Magnet Synchronous GeneratorDokumen6 halamanVariable Speed Drive Modelling of Wind Turbine Permanent Magnet Synchronous GeneratorMichael SaandBelum ada peringkat
- 510 TorresDokumen6 halaman510 TorresnavidelecBelum ada peringkat
- Windfarm Layout OptimisationDokumen6 halamanWindfarm Layout OptimisationPartha BiswasBelum ada peringkat
- A Novel Control Strategy of Power Converter Used To Direct Driven Permanent Magnet Wind Power Generation SystemDokumen4 halamanA Novel Control Strategy of Power Converter Used To Direct Driven Permanent Magnet Wind Power Generation Systemjamal64722111Belum ada peringkat
- Dynamic Analysis of A Grid-Connected Induction Generator Driven by A Wave-Energy Turbine Through Hunting NetworksDokumen5 halamanDynamic Analysis of A Grid-Connected Induction Generator Driven by A Wave-Energy Turbine Through Hunting NetworksEngrImranKhanBelum ada peringkat
- Transient Stability Evaluation of Power Systems with Large Amounts of DGDokumen5 halamanTransient Stability Evaluation of Power Systems with Large Amounts of DGNarendra YadavBelum ada peringkat
- Eea 63 1 2015 078 EN LP 000 PDFDokumen10 halamanEea 63 1 2015 078 EN LP 000 PDFhamza gaBelum ada peringkat
- Wind Power Systems: Course 2 Modelling of Wind TurbinesDokumen34 halamanWind Power Systems: Course 2 Modelling of Wind TurbinesShade AlexBelum ada peringkat
- Pan 2008Dokumen5 halamanPan 2008raisaBelum ada peringkat
- DFIG-Based Wind Turbine Robust Control Using High-Order Sliding Modes and A High Gain ObserverDokumen8 halamanDFIG-Based Wind Turbine Robust Control Using High-Order Sliding Modes and A High Gain Observerabdeldjabbar14Belum ada peringkat
- FuzzyDokumen8 halamanFuzzyRITWIK MALBelum ada peringkat
- Maximizing DFIG wind turbine energy with MPPT controlDokumen19 halamanMaximizing DFIG wind turbine energy with MPPT controlminhhoang091Belum ada peringkat
- Hybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 CertifiedDokumen9 halamanHybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 Certifiedsatya_vanapalli3422Belum ada peringkat
- A EolianDokumen5 halamanA Eolianerwinnatividad15Belum ada peringkat
- Fuzzy-Logic Control System of A Variable-Speed Variable-Pitch Wind-Turbine and A Double-Fed Induction GeneratorDokumen6 halamanFuzzy-Logic Control System of A Variable-Speed Variable-Pitch Wind-Turbine and A Double-Fed Induction GeneratorRevuBelum ada peringkat
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDari EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlPenilaian: 5 dari 5 bintang5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDari EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesBelum ada peringkat
- Neural Networks - Basics Matlab PDFDokumen59 halamanNeural Networks - Basics Matlab PDFWesley DoorsamyBelum ada peringkat
- Indirect Control of A Low Power Single-Phase Active Power FilterDokumen8 halamanIndirect Control of A Low Power Single-Phase Active Power FilterresBelum ada peringkat
- Basic Electrical Engineering by U.A BakshiDokumen625 halamanBasic Electrical Engineering by U.A BakshiEngr. Abdul Qayyum100% (2)
- Nahvi, Mahmood (Author) - Schaum'S Outline of Electric Circuits. Blacklick, Oh, Usa: Mcgraw-Hill Trade, 2002. P 1Dokumen80 halamanNahvi, Mahmood (Author) - Schaum'S Outline of Electric Circuits. Blacklick, Oh, Usa: Mcgraw-Hill Trade, 2002. P 1resBelum ada peringkat
- 17 - Sound WavesDokumen26 halaman17 - Sound WavesresBelum ada peringkat
- Problems and Solutions in ElectronicsDokumen208 halamanProblems and Solutions in ElectronicsgraciousparulBelum ada peringkat
- 27 - Current and ResistanceDokumen28 halaman27 - Current and ResistanceresBelum ada peringkat
- Simulink Fuzzy Logic LibraryDokumen9 halamanSimulink Fuzzy Logic Libraryu04f061Belum ada peringkat
- 1337020894-Cythar-Star To Delta Transformation PDFDokumen11 halaman1337020894-Cythar-Star To Delta Transformation PDFKarthick SubramaniamBelum ada peringkat
- Em NotesDokumen133 halamanEm NotesShashank MallepulaBelum ada peringkat
- Em NotesDokumen133 halamanEm NotesShashank MallepulaBelum ada peringkat
- Review Vector Operators Maxwell's Differential Equations PDFDokumen10 halamanReview Vector Operators Maxwell's Differential Equations PDFresBelum ada peringkat
- Pet1 4 PDFDokumen1 halamanPet1 4 PDFresBelum ada peringkat
- FPGA-Based Image Feature Extraction Using Xilinx System GeneratorDokumen5 halamanFPGA-Based Image Feature Extraction Using Xilinx System GeneratorresBelum ada peringkat
- Inverter 2002Dokumen54 halamanInverter 2002Sandro MoreroBelum ada peringkat
- Implementation of Image Processing Lab Using Xilinx System GeneratorDokumen9 halamanImplementation of Image Processing Lab Using Xilinx System Generatorzareen sheikhBelum ada peringkat
- Inverter 2002Dokumen54 halamanInverter 2002Sandro MoreroBelum ada peringkat
- DC To AC ConvertersDokumen41 halamanDC To AC ConvertersresBelum ada peringkat
- 02 AtomsDokumen3 halaman02 AtomsZigmund Bryan CortezaBelum ada peringkat
- Stefan BoltzmannDokumen28 halamanStefan BoltzmannAugusto GloopBelum ada peringkat
- Curtain Wall Calculation PDFDokumen134 halamanCurtain Wall Calculation PDFAlaaBadwy100% (1)
- Line-Scanning Laser Scattering System For Fast Defect Inspection of A Large Aperture SurfaceDokumen10 halamanLine-Scanning Laser Scattering System For Fast Defect Inspection of A Large Aperture SurfaceAyman IsmailBelum ada peringkat
- 13C NMR Spectroscopy of Coumarin DerivativesDokumen18 halaman13C NMR Spectroscopy of Coumarin DerivativesGeorge MoshiashviliBelum ada peringkat
- Becker 1987Dokumen16 halamanBecker 1987Luis Fernando Vergaray AstupiñaBelum ada peringkat
- FEA 2 McqsDokumen26 halamanFEA 2 Mcqsrak RoyBelum ada peringkat
- National Level E-Conference On Innovative Trends in MechanicalDokumen16 halamanNational Level E-Conference On Innovative Trends in MechanicalA BBBelum ada peringkat
- Catalogo Raycap Baja TensionDokumen250 halamanCatalogo Raycap Baja TensionDomingo RuizBelum ada peringkat
- SV Is5Dokumen205 halamanSV Is5weiya100% (1)
- MomentumDokumen2 halamanMomentumMuhammad UsmanBelum ada peringkat
- Literal Equations Name ProjectDokumen4 halamanLiteral Equations Name Projectapi-297789948Belum ada peringkat
- Section A: Multiple Choice Questions (20 Marks)Dokumen4 halamanSection A: Multiple Choice Questions (20 Marks)saed cabdiBelum ada peringkat
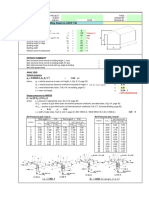
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Dokumen2 halamanWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldBelum ada peringkat
- Course Structure and Detailed Syllabus For 1st Year B.tech Admission Batch 2023-24Dokumen27 halamanCourse Structure and Detailed Syllabus For 1st Year B.tech Admission Batch 2023-24nabajyotimajhi2000Belum ada peringkat
- New Regulations For Geotech GermanyDokumen10 halamanNew Regulations For Geotech GermanySâu HeoBelum ada peringkat
- Lectu 14Dokumen4 halamanLectu 14YeviraArinDiyanaBelum ada peringkat
- Experiment No 8: Aim: To Determine The Frequency & Wavelength in A Rectangular Waveguide Working inDokumen5 halamanExperiment No 8: Aim: To Determine The Frequency & Wavelength in A Rectangular Waveguide Working inSanab KumarBelum ada peringkat
- Laboratory Manual For Ac Electrical CircuitsDokumen90 halamanLaboratory Manual For Ac Electrical CircuitsLharie Mae BecinaBelum ada peringkat
- Applied Thermodynamics Tutorial Reciprocating CompressorsDokumen2 halamanApplied Thermodynamics Tutorial Reciprocating CompressorsChris ZiyuenBelum ada peringkat
- Carrfoster 2Dokumen5 halamanCarrfoster 2SauravBelum ada peringkat
- Models of The AtomDokumen38 halamanModels of The AtomKC TorresBelum ada peringkat
- Unit 15 - Reaction Rates and EquilibriumDokumen68 halamanUnit 15 - Reaction Rates and EquilibriumGarett Berumen-RoqueBelum ada peringkat
- Energy Interactions With The Earth SurfaceDokumen3 halamanEnergy Interactions With The Earth SurfaceAmirulTarliBelum ada peringkat
- Experiment No. 2: Slider Crank MechanismDokumen6 halamanExperiment No. 2: Slider Crank MechanismLovekeshBelum ada peringkat
- Archimedes' Principle and Buoyant ForcesDokumen20 halamanArchimedes' Principle and Buoyant ForcesAnonymous yfkitRbSvZBelum ada peringkat
- Constraint PDFDokumen12 halamanConstraint PDFNeelesh BenaraBelum ada peringkat
- Science and TechnologyDokumen10 halamanScience and TechnologyentjinrBelum ada peringkat
- The Relevance of YS/UTS RatioDokumen21 halamanThe Relevance of YS/UTS RatiocarrespmBelum ada peringkat
- Properties of Matter Test ReviewDokumen9 halamanProperties of Matter Test ReviewAngel PeayBelum ada peringkat