Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Changing Out The Injector Seals On A 2007 PJ Ford Ranger 3.0 TDCiDokumen3 halamanChanging Out The Injector Seals On A 2007 PJ Ford Ranger 3.0 TDCiAgustinus D100% (3)
- Assignment 3 - 2 Microcontrollers With DatasheetsDokumen2 halamanAssignment 3 - 2 Microcontrollers With Datasheetsapi-42328551276% (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Surface Finish StandardDokumen3 halamanSurface Finish StandardvinodmysoreBelum ada peringkat
- Microsoft SQL DatabaseDokumen401 halamanMicrosoft SQL Databasemtamilmani50% (2)
- TV FaultsDokumen1.026 halamanTV Faultsdasho1Belum ada peringkat
- IOT SyllabusDokumen3 halamanIOT Syllabuspoojan thakkarBelum ada peringkat
- Vulnerability Management PolicyDokumen6 halamanVulnerability Management PolicySerdar AktaşBelum ada peringkat
- Evaporator Design CalculationDokumen58 halamanEvaporator Design CalculationManoj BBelum ada peringkat
- 1 5005926757358895201Dokumen3 halaman1 5005926757358895201Nivas VeeBelum ada peringkat
- FAQ How To Read A CrosstableDokumen3 halamanFAQ How To Read A CrosstableNivas VeeBelum ada peringkat
- P Arsed ResultDokumen7 halamanP Arsed ResultNivas VeeBelum ada peringkat
- FAQ How To Read A CrosstableDokumen4 halamanFAQ How To Read A CrosstableasdfBelum ada peringkat
- DC Motor DetailsDokumen1 halamanDC Motor DetailsNivas VeeBelum ada peringkat
- Chapter 4Dokumen12 halamanChapter 4anil.gelra5140Belum ada peringkat
- EGM NoticeDokumen8 halamanEGM NoticeNivas VeeBelum ada peringkat
- Form 7 Share Capital IncreaseDokumen12 halamanForm 7 Share Capital IncreaseNivas VeeBelum ada peringkat
- Knowlarity PricingDokumen1 halamanKnowlarity PricingNivas VeeBelum ada peringkat
- Assessing KMM of OrganizationsDokumen11 halamanAssessing KMM of OrganizationsNivas VeeBelum ada peringkat
- Input Output Structure of Conventional and SRI Method of Paddy Cultivation in Thanjavur DistrictDokumen10 halamanInput Output Structure of Conventional and SRI Method of Paddy Cultivation in Thanjavur DistrictNivas VeeBelum ada peringkat
- Istqb Foundation Level Syllabus - 2014Dokumen78 halamanIstqb Foundation Level Syllabus - 2014Joshua HolderBelum ada peringkat
- Access LogDokumen398 halamanAccess LogNivas VeeBelum ada peringkat
- IndmedDokumen13 halamanIndmedNivas VeeBelum ada peringkat
- Anna University PHD Submission ChecklistDokumen1 halamanAnna University PHD Submission ChecklistNivas VeeBelum ada peringkat
- Guidelines Assessing KMM of OrganizationsDokumen12 halamanGuidelines Assessing KMM of OrganizationsNivas VeeBelum ada peringkat
- BT AddressDokumen1 halamanBT AddressNivas VeeBelum ada peringkat
- BT AddressDokumen1 halamanBT AddressNivas VeeBelum ada peringkat
- Transforms and Partial Differential Equations-Nov, Dec2013Dokumen2 halamanTransforms and Partial Differential Equations-Nov, Dec2013Nivas VeeBelum ada peringkat
- BT AddressDokumen1 halamanBT AddressNivas VeeBelum ada peringkat
- BT AddressDokumen1 halamanBT AddressNivas VeeBelum ada peringkat
- Courses ListDokumen4 halamanCourses ListNivas VeeBelum ada peringkat
- Glossary OfcDokumen42 halamanGlossary OfcNivas VeeBelum ada peringkat
- Courses ListDokumen4 halamanCourses ListNivas VeeBelum ada peringkat
- 1 - Criminal - LawDokumen28 halaman1 - Criminal - LawSachin Kumar SinghBelum ada peringkat
- TableDokumen11 halamanTableNivas VeeBelum ada peringkat
- 1 Criminallaw PDFDokumen237 halaman1 Criminallaw PDFvikas92Belum ada peringkat
- Icons Used: Learning Objectives ActivityDokumen1 halamanIcons Used: Learning Objectives ActivityNivas VeeBelum ada peringkat
- vtigerCRM DataModel 5.2.1Dokumen24 halamanvtigerCRM DataModel 5.2.1Mauricio Restrepo GaleanoBelum ada peringkat
- Negative Skin Friction Aaron Budge Minnesota State UniversityDokumen46 halamanNegative Skin Friction Aaron Budge Minnesota State UniversityNguyễn Thành NhânBelum ada peringkat
- Adobe Transaction No 0991059129 20190125Dokumen2 halamanAdobe Transaction No 0991059129 20190125Mohamed WinnēriBelum ada peringkat
- CVDokumen21 halamanCVAngelica chea NatividadBelum ada peringkat
- 1169a AopDokumen12 halaman1169a AopBAYARD BernardBelum ada peringkat
- Swiss FCM Ordinance - EuPIA QDokumen6 halamanSwiss FCM Ordinance - EuPIA Qiz_nazBelum ada peringkat
- Introduction To Boltzmann LearningDokumen2 halamanIntroduction To Boltzmann LearningnvbondBelum ada peringkat
- Contoh Ringkasan Mengajar Bahasa Inggeris Tahun 2 Dan 3Dokumen2 halamanContoh Ringkasan Mengajar Bahasa Inggeris Tahun 2 Dan 3Izla MajidBelum ada peringkat
- Identify Challenges in Relationship Development Final AhahhaDokumen2 halamanIdentify Challenges in Relationship Development Final AhahhaKylaBelum ada peringkat
- Notes On Foam From SFPE HandbookDokumen10 halamanNotes On Foam From SFPE HandbookkdsessionsBelum ada peringkat
- AMS BreakerDokumen4 halamanAMS Breakerkuttu9703Belum ada peringkat
- 29-Horizontal Subsea Xmas Tree enDokumen2 halaman29-Horizontal Subsea Xmas Tree encarthik_rajaBelum ada peringkat
- Phone Genesys ConfigurationDokumen22 halamanPhone Genesys ConfigurationRodolfo TobiasBelum ada peringkat
- Calculation Surfaces (Results Overview) : Philips HRODokumen4 halamanCalculation Surfaces (Results Overview) : Philips HROsanaBelum ada peringkat
- 29 Oct. To 4 Nov. 211Dokumen16 halaman29 Oct. To 4 Nov. 211pratidinBelum ada peringkat
- Three-Phase Induction Motor Dynamic Mathematical ModelDokumen3 halamanThree-Phase Induction Motor Dynamic Mathematical Modelsajs201100% (3)
- Erita Astrid - UPBDokumen25 halamanErita Astrid - UPBmas_kinooooBelum ada peringkat
- Microsoft Word - Exercise 3 Subsea P&PDokumen5 halamanMicrosoft Word - Exercise 3 Subsea P&PKRBelum ada peringkat
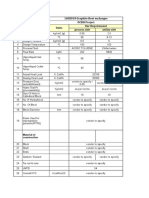
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDokumen2 halaman16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaBelum ada peringkat
- Blender 04Dokumen38 halamanBlender 04Ana Maria100% (1)
- Glass Stair RailingsDokumen1 halamanGlass Stair RailingsRenz ChuaBelum ada peringkat
- Serie: Guía RápidaDokumen12 halamanSerie: Guía RápidalumapueBelum ada peringkat
- Heidegger Midterm DissDokumen72 halamanHeidegger Midterm Dissrhoda mae a. paquinolBelum ada peringkat