Anda mungkin juga menyukai
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- ME4542/ME4542-G: N and P-Channel 30-V (D-S) MOSFETDokumen7 halamanME4542/ME4542-G: N and P-Channel 30-V (D-S) MOSFETfelipe ayalaBelum ada peringkat
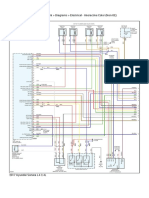
- 2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairDokumen6 halaman2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairChino PlagaBelum ada peringkat
- "Chapter 9 - Influence Lines For Statically Determinate Structures" in "Structural Analysis" On Manifold @tupressDokumen33 halaman"Chapter 9 - Influence Lines For Statically Determinate Structures" in "Structural Analysis" On Manifold @tupressrpsirBelum ada peringkat
- The Effective SpanDokumen4 halamanThe Effective SpanMohamed FarahBelum ada peringkat
- Prince Hydraulics Wolverine Adjustable Flow Control Valve Offered by PRC Industrial SupplyDokumen1 halamanPrince Hydraulics Wolverine Adjustable Flow Control Valve Offered by PRC Industrial SupplyPRC Industrial SupplyBelum ada peringkat
- How To Make FireworksDokumen14 halamanHow To Make FireworksLeonardo BiancoBelum ada peringkat
- Theory-Set & Relations PDFDokumen4 halamanTheory-Set & Relations PDFmp SinghBelum ada peringkat
- P&S U V PracticeDokumen4 halamanP&S U V PracticeHari KrushnaBelum ada peringkat
- Case Study Oil and Gas - PowerpointDokumen8 halamanCase Study Oil and Gas - PowerpointYaxssBelum ada peringkat
- Pipe Support Span CalculationDokumen14 halamanPipe Support Span Calculationrajeevfa100% (3)
- Kyocera 1800Dokumen2 halamanKyocera 1800gendoetzBelum ada peringkat
- Nelson Tables All in One PDFDokumen618 halamanNelson Tables All in One PDFAmulya Ramakrishna100% (7)
- Glass Standards PDFDokumen4 halamanGlass Standards PDFCristian TofanBelum ada peringkat
- Hardie Reveal Panel Installation Instructions 1597005Dokumen29 halamanHardie Reveal Panel Installation Instructions 1597005David TorskeBelum ada peringkat
- Norma ASTM C171Dokumen2 halamanNorma ASTM C171Jony Gutiérrez100% (1)
- Head To Toe Assessment GuideDokumen2 halamanHead To Toe Assessment GuideSara SabraBelum ada peringkat
- 03 Soil Classification Numerical PDFDokumen5 halaman03 Soil Classification Numerical PDFabishrantBelum ada peringkat
- Sawla - Laska (Lot - I) Road Project Hydrology - Hydraulics MDokumen64 halamanSawla - Laska (Lot - I) Road Project Hydrology - Hydraulics Mashe zinab100% (2)
- Heil 4000 FeaturesDokumen1 halamanHeil 4000 FeaturesBogdan NgrBelum ada peringkat
- Antena Kathrein 742266 PDFDokumen2 halamanAntena Kathrein 742266 PDFcesarbayonaBelum ada peringkat
- Haldiram-A Success Story in Family Business: Credit Seminar OnDokumen12 halamanHaldiram-A Success Story in Family Business: Credit Seminar OnAnuBelum ada peringkat
- Radiant ThinkingDokumen4 halamanRadiant Thinkingeehwa88Belum ada peringkat
- Chapter Two Feasibility Study 2.0 Methods of Producing Ammonium Sulphate, ( (NH) SO)Dokumen9 halamanChapter Two Feasibility Study 2.0 Methods of Producing Ammonium Sulphate, ( (NH) SO)Adeyoju RebeccaBelum ada peringkat
- MEAMTA2-Assignment 2Dokumen5 halamanMEAMTA2-Assignment 2pfukanisibuyi7Belum ada peringkat
- Material Control Procedure - TemplateDokumen5 halamanMaterial Control Procedure - TemplateHernandito Rahmat KusumaBelum ada peringkat
- Material Specifications: Low Carbon Steel, Hot Rolled Sheet and StripDokumen5 halamanMaterial Specifications: Low Carbon Steel, Hot Rolled Sheet and Striptim0% (1)
- Water Treatment Lecture 4Dokumen34 halamanWater Treatment Lecture 4pramudita nadiahBelum ada peringkat
- Energy and FluctuationDokumen10 halamanEnergy and Fluctuationwalid Ait MazouzBelum ada peringkat
- Medical BiotechnologyDokumen4 halamanMedical Biotechnologyعمر بن عليBelum ada peringkat
- Ronstan Regatta Watch InstructionsDokumen7 halamanRonstan Regatta Watch InstructionsMatt HartmanBelum ada peringkat